Изобретение относится к области машиностроения и к различным технологическим процессам, т.е. там, где используются стержневые механизмы, и может применяться во всех устройствах, предназначенных для преобразования вращательного движения в поступательное и наоборот от ведущего звена к ведомому и изменения величины и скорости их движения, например, в транспортной технике (в автомобилях с двигателем внутреннего сгорания, в электромобилях с возвратно-поступательным движением ведущего звена электродвигателя), в кривошипно-коромысловых и импульсных механизмах, в молотах, прессах, штампах, прижимных устройствах и т.д.
Известен кривошипно-коромысловый механизм, изображенный на рисунке 255 на стр. 75 книги С.Н. Кожевникова и др. «Элементы механизмов» (изд. второе, исправленное и дополненное, Москва, 1956, Государственное издательство оборонной промышленности), который состоит из кривошипа, шатуна и ведомого звена коромысла, соединенных между собой посредством шарниров.
Данный механизм имеет ограниченные возможности, заключающиеся в том, что возвратно-поступательное движение шарнира шатун - ведомое звено коромысло зависит от скорости вращения кривошипа и не имеет возможности изменения скорости движения этого шарнира.
Известен кривошипно-шатунный механизм, изображенный на фиг. 419 (стр. 116) названной выше книги С.Н. Кожевникова, который содержит ведомое звено ползун, шарнирно соединенный с ним шатун и кривошип, образующий шарнирную пару со вторым шатуном, составляющим шарнирный трехзвенник с шатуном и коромыслом, имеющим опору.
В этом механизме имеется возможность изменения величины хода шарнира шатун-ведомое звено ползун за счет изменения положения опоры (на фиг. 419 - точки «А») в направлении движения ведомого звена-ползуна (в описании к фиг. 419 сказано, что «Изменением положения точки «А» можно менять ход (h=var) ползуна …», т.е., как было сказано выше, в направлении, параллельном направлению движения ползуна).
Но изменение величины хода шарнира шатун-ползун, а значит и скорости его перемещения, в этом механизме имеет незначительную величину.
Кроме того, в нем отсутствует возможность их изменения во времени.
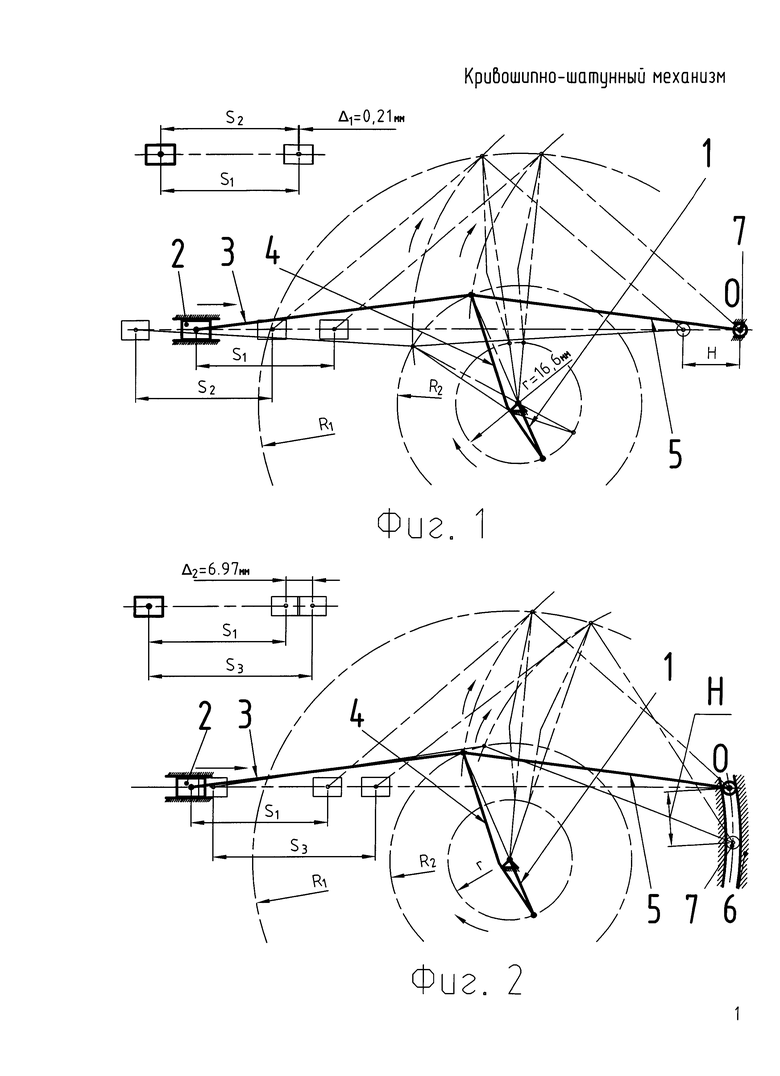
Так, величина хода ведомого звена ползуна при перемещении точки «А» (на фиг. 419 представленной выше книги) или точки «О» (на фиг. 1 данного описания) на величину «Н» в направлении движения ползуна изменяется со значения S1 до значения S2, и разница Δ1 этих значений в масштабе представленных рисунков составляет лишь 0,21 мм.
Кроме того, как показал анализ этого известного кривошипно-шатунного механизма существует зона, в которой известный механизм теряет работоспособность при нахождении в ней опоры коромысла.
Доказательство этого утверждения представлено ниже.
Задачей изобретения является расширение технических возможностей известного кривошипно-шатунного механизма, заключающееся в увеличении диапазона изменения величины перемещения шарнира шатун-ведомое звено и, как следствие, диапазона изменения скорости его движения, а также возможности изменения скорости перемещения шарнира шатун-ведомое звено во времени.
Поставленная задача решается за счет того, что в известном кривошипно-шатунном механизме, принятом нами за прототип, содержащем ведомое звено ползун, шарнирно соединенный с ним шатун и кривошип, образующий шарнирную пару со вторым шатуном, составляющим шарнирный трехзвенник с шатуном и коромыслом (коромысло в этом механизме при подвижной опоре становится шатуном, поэтому в дальнейшем назовем это звено коромыслом-шатуном), имеющим шарнирную опору, которая имеет возможность перемещения по направляющей, траектория которой отличается от направления движения шарнира шатун-ведомое звено и находится в пределах зоны, определяемой окружностями, центры которых совпадают с осью вращения кривошипа, при этом радиус одной равен длине коромысла-шатуна за вычетом из нее разницы длин второго шатуна и кривошипа, а радиус второй - длине коромысла-шатуна плюс разница длин второго шатуна и кривошипа.
Этот предлагаемый механизм в отличие от известного кривошипно-шатунного механизма, изображенного на фиг. 419, позволяет существенно увеличить диапазон варьирования величиной и скоростью хода шарнира шатун-ведомое звено, скоростью перемещения во времени и определяет зону, в которой кривошипно-шатунный механизм работоспособен.
Обоснование, подтверждающее увеличение диапазона варьирования величиной и скоростью хода шарнира шатун-ведомое звено на значительную величину, представлено ниже в виде графического сравнивания величин ходов шарниров ведомое звено-шатун известного и предлагаемого кривошипно-шатунных механизмов.
Выше было сказано, что при перемещении точки «А» (на фиг. 419) или точки «О» (на фиг. 1 данного описания) на величину «Н» в направлении движения ползуна величина изменения его хода Δ1 составляет лишь 0,21 мм.
При перемещении шарнира шатун-ведомое звено на ту же величину «Н», что и в известном кривошипно-шатунном механизме, представленном на фиг. 419, но в направлении, близком к перпендикулярному по отношению к направлению перемещения ползуна 2, величины хода ползуна S1 и S3 (см. фиг. 2) отличаются в большей степени (A2=S3-S1=6,97 мм), а именно значение Δ2 больше значения Δ1 (Δ1=0,21 мм) в 33 раза, т.е. налицо значительное увеличение хода шарнира шатун-ползун 2, а значит и скорости его движения.
Отсюда следует, что увеличение хода, а значит и скорости перемещения шарнира шатун-ведомое звено в предлагаемой передаче достигается в результате перемещения точки «А» на фиг. 419 (или шарнира «О» коромысло-шатун - опора на фиг. 2) в направлении, не совпадающем с траекторией движения шарнира шатун-ползун.
Изменение во времени величин хода и скорости шарнира шатун-ведомое звено обеспечивается перемещением опоры коромысла-шатуна по направляющей посредством какого-либо привода.
Зона, в пределах которой может находиться траектория перемещения подвижной опоры коромысла и которая определена выше, обеспечивает работоспособность предлагаемого механизма.
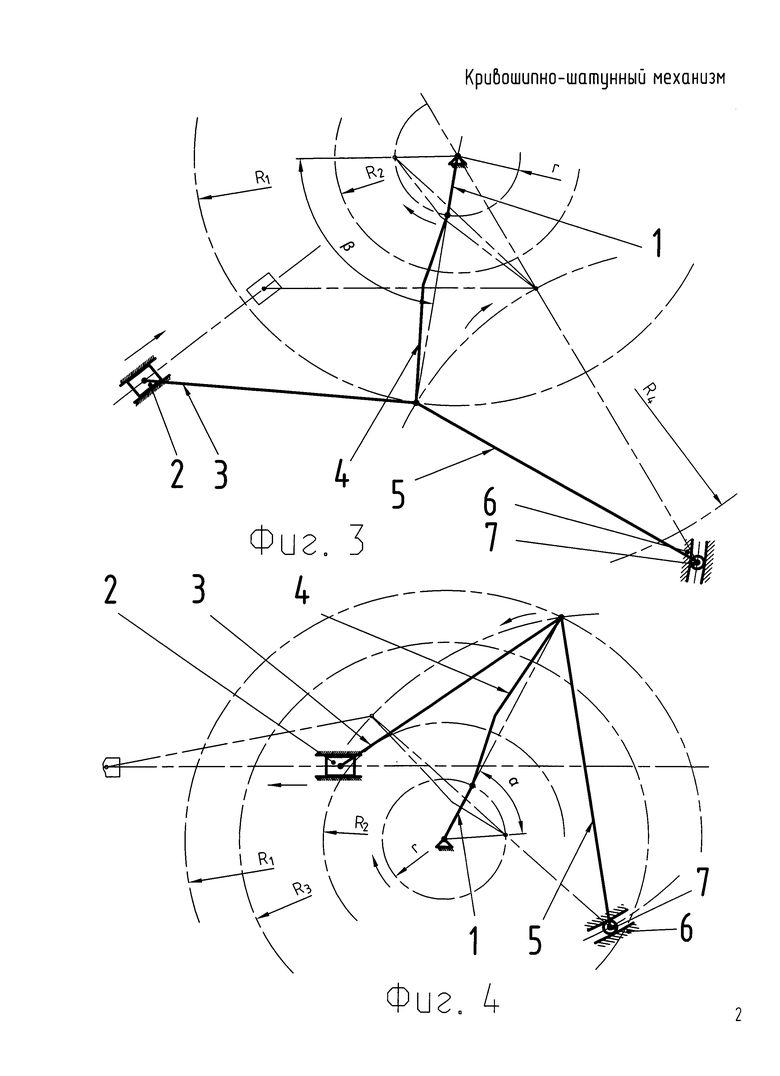
Так, при нахождении шарнира опора 7 - коромысло-шатун 5 внутри окружности радиусом R3, определяющей зону наиболее близкого положения шарнира, кривошип 1 поворачивается на угол α (см. фиг. 4) по направлению стрелки до момента совмещения шарнира кривошип 1 - второй шатун 4 с коромыслом-шатуном 5.
Дальнейшему вращению кривошипа 1 препятствует коромысло-шатун 5 (оно должно сжиматься), что приводит к заклиниванию механизма.
При нахождении шарнира опора 7 - коромысло-шатун 5 вне окружности радиусом R4, определяющей зону наиболее удаленного положения шарнира, кривошип 1 поворачивается на угол β (см. фиг. 3) по направлению стрелки до момента совмещения коромысла-шатуна 5 с линией, соединяющей ось шарнира коромысло-шатун 5 - опора 7 с осью вращения кривошипа 1.
Дальнейшему вращению кривошипа 1 также препятствует коромысло-шатун 5 (оно должно растягиваться), что также приводит к заклиниванию механизма.
Перемещение шарнира коромысло-шатун - опора внутри указанной выше зоны, кроме того, что это условие обеспечивает работоспособность предлагаемого кривошипно-шатунного механизма, оно позволяет иметь различные конечные положения шарнира шатун - ведомое звено в зависимости от положения шарнира коромысло-шатун - опора.
Предлагаемый кривошипно-шатунной механизм может быть применен и в кривошипно-коромысловых механизмах, в которых ведомым является шарнир шатун-коромысло, и в импульсных механизмах.
Предлагаемый кривошипно-шатунный механизм может иметь дополнительные варианты исполнения.
Так, кривошип в кривошипно-шатунном механизме, или ведомое звено (коромысло) в кривошипно-коромысловом механизме или оба одновременно могут быть выполнены изменяемыми по длине, что позволит дополнительно увеличивать диапазон регулирования величины и скорости хода шарнира шатун-ведомое звено, а в определенном сочетании положения подвижной опоры коромысла-шатуна и длин коромысла и кривошипа (которые находятся аналитически или графически) можно получить вращательное движение коромысла, т.е. кривошип и коромысло будут вращаться с одинаковой угловой скоростью.
Конструкция механизма изменения длины коромысла и кривошипа может быть выполнена, например, в виде актуатора, как изображено на фиг. 9, или посредством других подобных устройств. Электрическое напряжение к нему может быть подано посредством вращающегося контактного устройства.
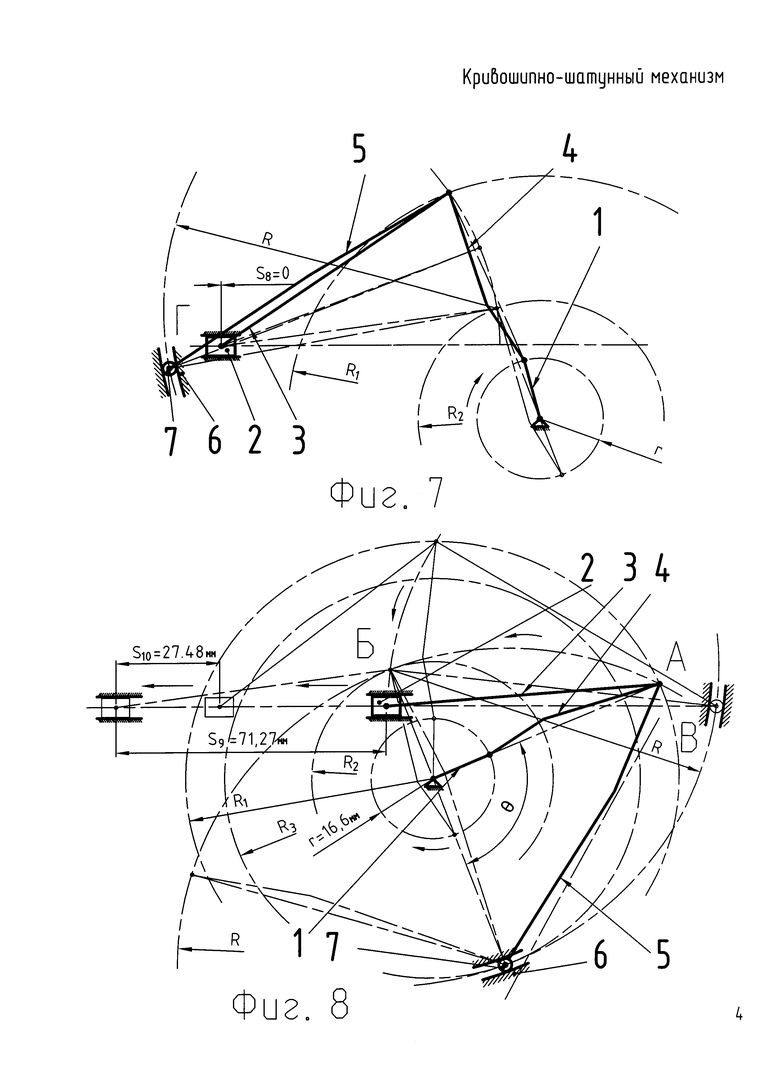
Следующее усовершенствование предлагаемого кривошипно-шатунного механизма заключается в том, что траектория направляющей опоры коромысла-шатуна может быть выполнена по форме окружности, радиус которой равен длине коромысла-шатуна, при этом центр ее может находиться в зоне, определяемой окружностями, радиус одной из которых равен сумме длин второго шатуна и кривошипа, а радиус второй - их разнице, (на фиг. 10 центр окружности расположен близко к центру этой зоны), что позволяет также иметь зависимость крайних положений шарнира шатун-ведомое звено от положения шарнира коромысло-шатун - опора, т.е. оба крайних положения шарнира шатун-ведомое звено будут меняться при перемещении подвижной опоры по своей направляющей в том или ином направлении, и, значения (близкого к нулевому - см. фиг. 7) до максимального (см. фиг. 8) и наоборот.
Как показал анализ, максимальный ход возвратно-поступательного движения шарнира шатун - ведомое звено может превысить значение диаметра круга, описываемого кривошипом, равного величине 2r, где r - радиус кривошипа, более чем в 2 раза (согласно фиг. 8 отношение S9/2r=71,27/2⋅16,57=2,15).
При любой компоновке звеньев механизма максимальный ход ползуна обеспечивается при совпадении оси шарнира коромысло-шатун - опора с окружностью радиусом R3.
Этот вариант применения передачи с ведомым звеном-ползуном может быть применен, например, в прессах или штампах, где требуется настройка хода рабочего органа пресса или штампа (ведомого звена) при обработке деталей разной толщины.
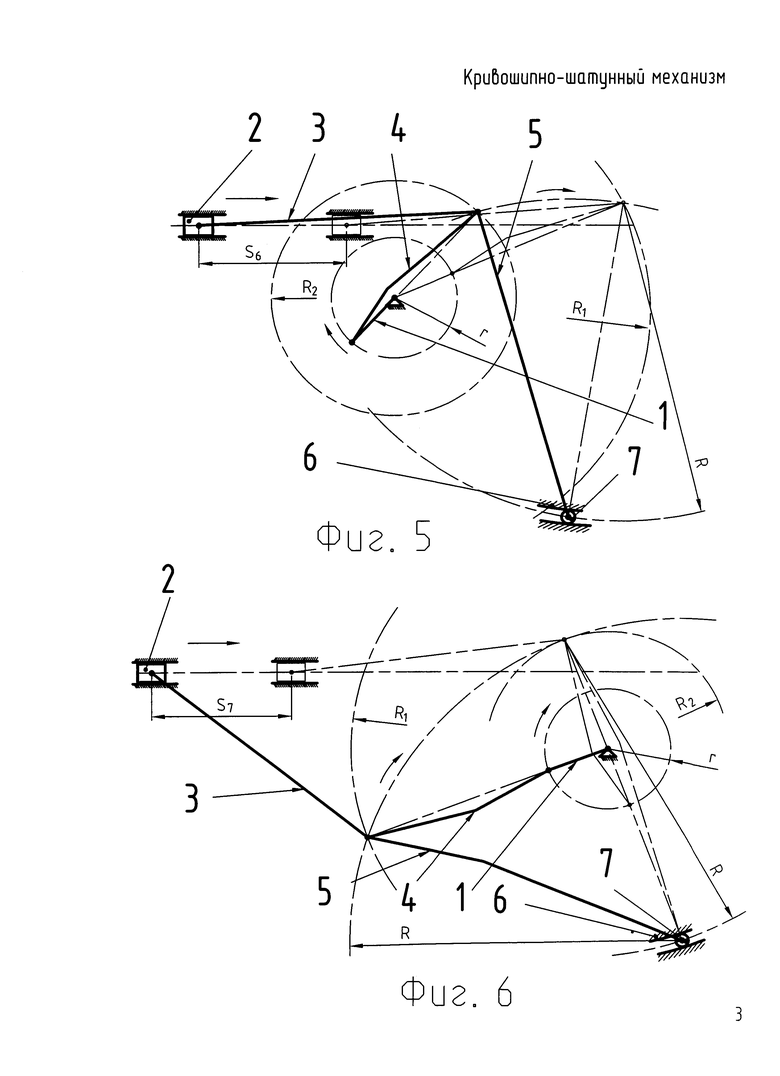
В частном случае центр окружности, по форме которой выполнена направляющая, может находиться на окружности, радиус которой равен разнице длин второго шатуна и кривошипа (см. фиг. 6 и 8), что позволяет обеспечить при каждом цикле полного оборота кривошипа постоянство остановки шарнира ведомое звено в крайнем, дальнем от оси вращения кривошипа, положении вне зависимости от положения опоры коромысла-шатуна на направляющей.
Выполнение этого условия необходимо, например, в двигателях внутреннего сгорания, когда поршень двигателя должен находиться в одном постоянном положении в начале своего движения к оси вращения коленчатого вала для обеспечения впрыска топливной смеси.
Применение этого варианта кривошипно-шатунного механизма с ведомым звеном ползуном позволяет также регулировать во времени ход поршня двигателя внутреннего сгорания (поршни двигателя могут быть соединены с шатунами посредством крейцкопфов для осуществления возможности разделения камеры сгорания от пространства, в которой находятся шатуны и другие звенья механизма) и, как следствие, скорость вращения коленчатого вала, а значит и скорость движения транспортного средства.
Во втором частном случае центр окружности, по форме которой выполнена направляющая опоры коромысла-шатуна, может находиться на окружности, радиус которой равен сумме длин второго шатуна и кривошипа (см. фиг. 5), что позволяет обеспечить при каждом цикле полного оборота кривошипа постоянство остановки ведомого звена в крайнем, ближнем к оси вращения кривошипа, положении вне зависимости от положения опоры коромысла-шатуна на направляющей.
Этот вариант применения предлагаемого механизма с ведомым звеном-ползуном может быть применен, например, в прессах или штампах, где требуется постоянство ограничения движения рабочего органа пресса или штампа в крайнем верхнем положении при холостом ходе рабочего органа.
Предлагаемый кривошипно-шатунный механизм с ведущим звеном-ползуном и, соответственно, с ведомым кривошипом, может состоять из одного ведущего звена ползуна, двух кривошипов и двух шарнирных трехзвенников, у которых шарниры трехзвенников расположены по одну или по разные стороны относительно линии, обозначающей траекторию перемещения оси шарнира двухзвенника ползун-шатун, а шарниры коромысло-шатун - опора имеют возможность синхронного перемещения, что позволяет иметь два ведущих вала вместо одного для сообщения вращательного движения какому-либо механизму (механизмам), например для автономного привода правых и левых колес той или иной транспортной техники.
Предлагаемый кривошипно-шатунный механизм с ведущим звеном ползуном может состоять из одного ползуна, двух кривошипов и двух шарнирных трехзвенников, звенья которых расположены зеркально относительно линии, обозначающей траекторию перемещения оси шарнира двухзвенника шатун-ползун, а шарниры коромысло-шатун - опора имеют возможность синхронного перемещения, что позволяет иметь два ведущих вала вместо одного для сообщения вращательного движения какому-либо механизму (механизмам) и, кроме того, значительно уменьшить потери на трение и повысить КПД в результате появления второй силы, нейтрализующей это трение и воздействующей на ведомое звено в противоположном направлении по отношению к первой, создающей трение.
Предлагаемое решение поясняется чертежами .
На фиг. 1 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором опора коромысла механизма-прототипа перемещается в сторону ползуна на величину Η (известный механизм по рисунку 419 указанной выше книги).
На фиг. 2 изображен для сравнения кривошипно-шатунный механизм с ведомым звеном ползуном (с увеличенным ходом ползуна), в котором опора коромысла-шатуна перемещается в направлении, не совпадающем с траекторией движения ползуна, но на ту же величину Н, что и на фиг. 1.
На фиг. 3 и 4 изображены кривошипно-шатунные механизмы с ведомыми звеньями ползунами, в которых опора коромысла-шатуна находится вне зон, в которых кривошип имеет возможность совершать полный оборот.
На фиг. 5 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором центр окружности, форму которой имеет траектория направляющей опоры коромысла-шатуна, находится на окружности, радиус которой равен сумме длин второго шатуна и кривошипа.
На фиг. 6 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором центр окружности, форму которой имеет траектория направляющей опоры коромысла-шатуна находится на окружности, радиус которой равен разнице длин второго шатуна и кривошипа.
На фиг. 7 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором центр окружности, форму которой имеет траектория направляющей опоры коромысла-шатуна, находится на окружности, радиус которой равен разнице длин второго шатуна и кривошипа, а собственно опора находится в точке, в которой ход подвижного звена практически равен нулю.
На фиг. 8 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором центр окружности, форму которой имеет траектория направляющей опоры коромысла-шатуна, находится на окружности, радиус которой равен разнице длин второго шатуна и кривошипа, а собственно опора в одном случае находится в точке (звенья изображены контурными линиями), в которой ход ведомого звена ползуна имеет максимальное значение (более 4-х радиусов кривошипа), и в точке (во втором случае, для сравнения), совпадающей с линией, обозначающей траекторию движения шарнира шатун - ползун, и в которой звенья изображены тонкими сплошными линиями.
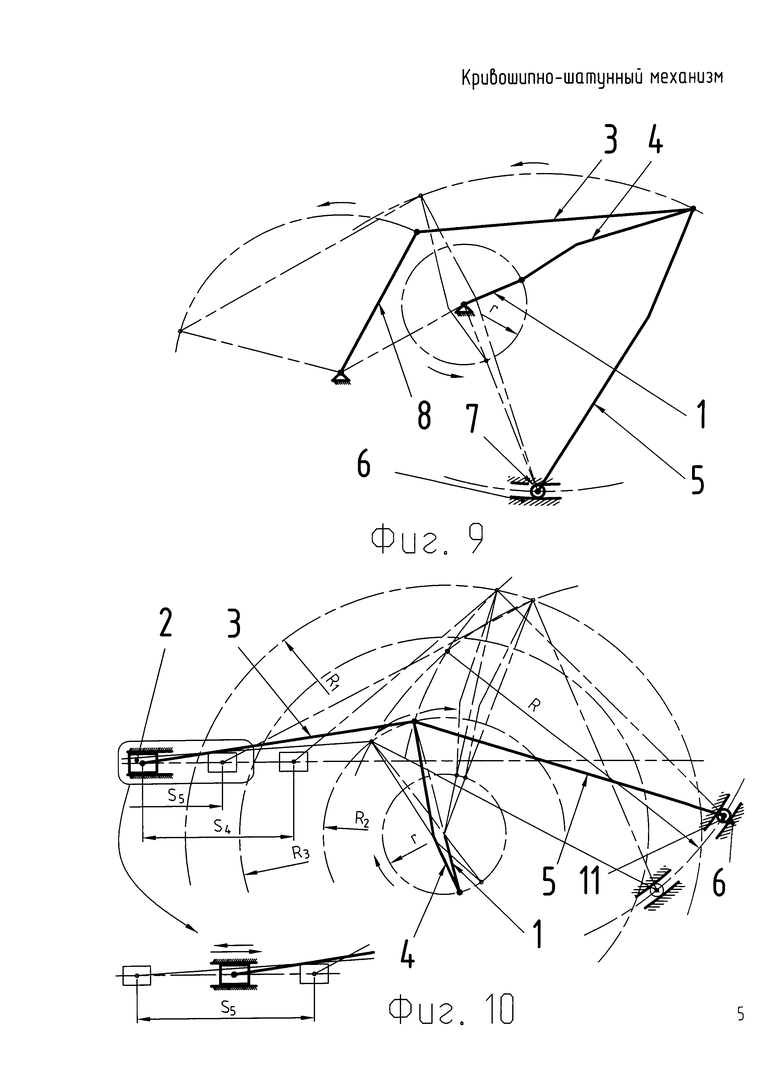
На фиг. 9 изображен кривошипно-шатунный механизм, в котором ведомым звеном является коромысло кривошипно-коромыслового механизма.
На фиг. 10 изображен кривошипно-шатунный механизм с ведомым звеном ползуном, в котором крайние положения ведомого звена ползуна не постоянны и находятся в зависимости от положения опоры 7 коромысла-шатуна 5.
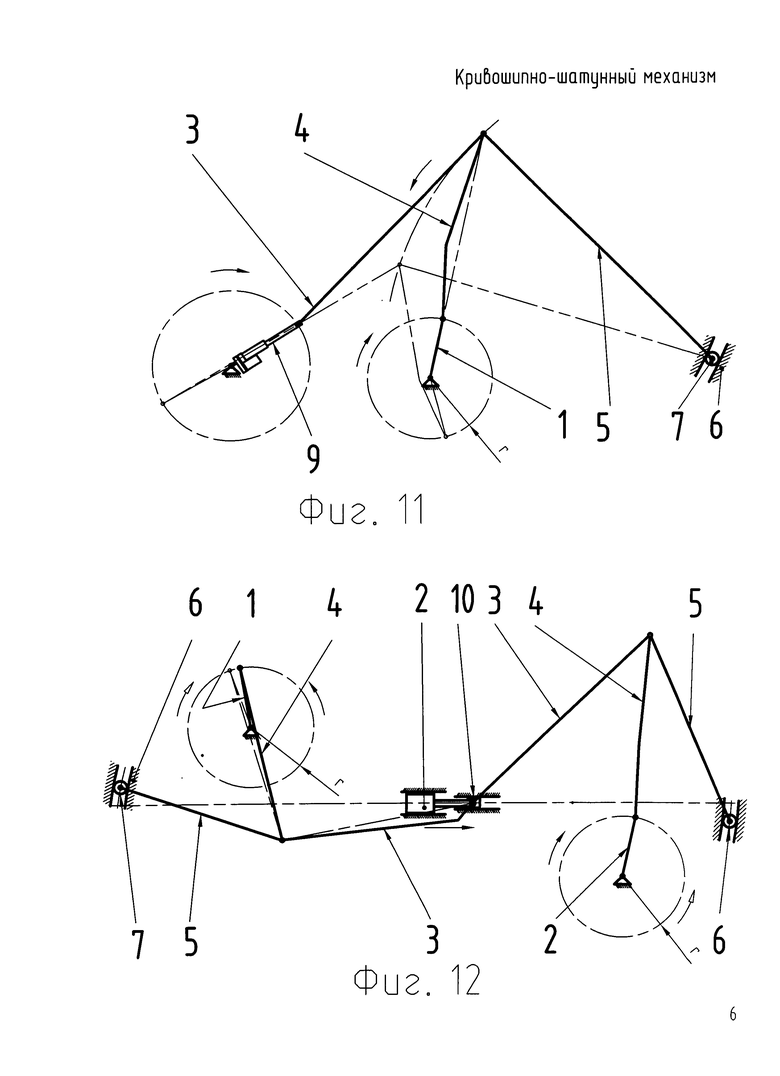
На фиг. 11 изображен кривошипно-шатунный механизм с изменяемым по длине ведомым звеном - коромыслом, выполненным в виде актуатора, при этом положение опоры коромысла-шатуна и длина коромысла подобраны таким образом, что коромысло совершает непрерывное вращение.
На фиг. 12 изображен кривошипно-шатунный механизм, в котором ползун является связующим звеном для двух шарнирных трехзвенников и кривошипов, у которых шарниры трехзвенников первый шатун - коромысло -второй шатун расположены по разные стороны относительно линии, обозначающей траекторию перемещения оси шарнира двухзвенника ползун - первый шатун. Кривошипы показаны вращающимися в противоположных направлениях. Штрихпунктирными линиями изображены механизмы с кривошипами, вращающимися в одном направлении (по стрелкам, изображенным штрихпунктирными линиями).
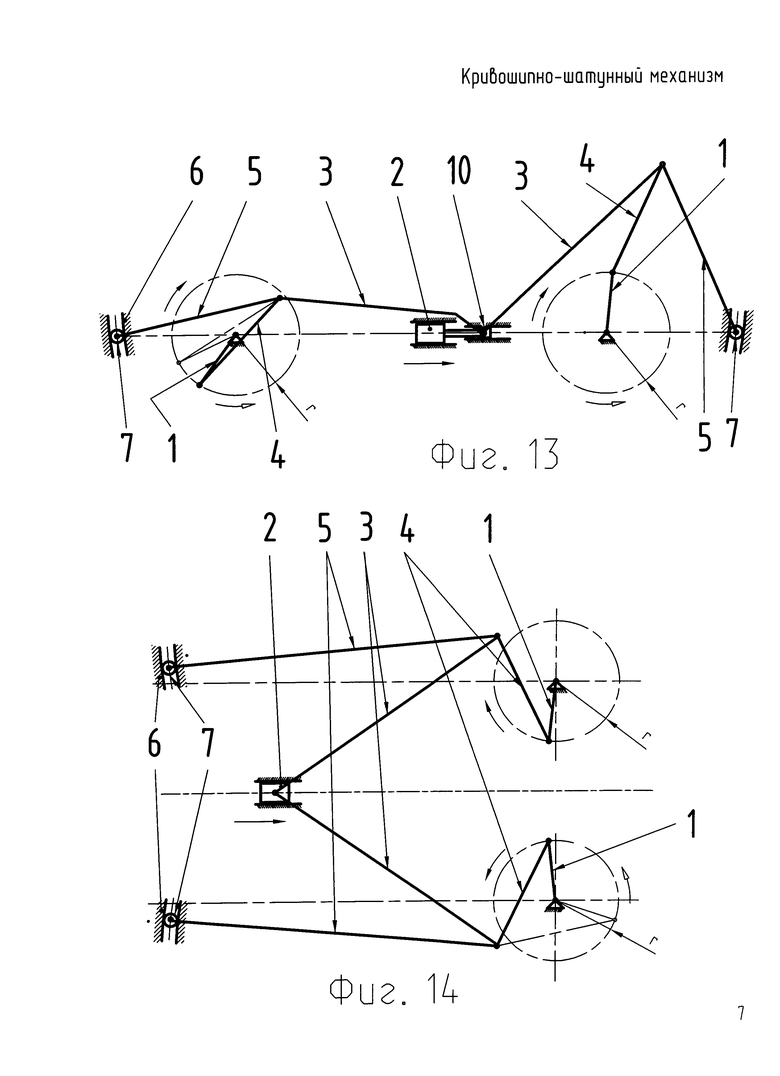
На фиг. 13 изображен кривошипно-шатунный механизм, в котором ползун является связующим звеном для двух шарнирных трехзвенников и кривошипов, оси вращения кривошипов которых (как частный случай) совпадают с линией, обозначающей траекторию движения ползуна, а шарниры трехзвенников первый шатун-коромысло - второй шатун расположены по одну сторону относительно линии, обозначающей траекторию перемещения оси шарнира двухзвенника ползун - первый шатун. Кривошипы показаны вращающимися в одном направлении. Штрихпунктирными линиями изображены механизмы с противоположным вращением кривошипов.
На фиг. 14 изображен кривошипно-шатунный механизм, в котором ползун является связующим звеном для двух шарнирных трехзвенников и кривошипов, находящихся зеркально относительно линии, обозначающей траекторию перемещения оси шарнира двухзвенника ползун - первый шатун. Кривошипы показаны вращающимися в противоположных направлениях. Оси вращения кривошипов изображены (как частный случай) совпадающими с линией, обозначающей траекторию движения ползуна
Состоит предлагаемый кривошипно-шатунный механизм из кривошипа 1, шарнирно соединенного с ведомыми звеньями ползуном 2 или коромыслом 8 при помощи шатуна 3, и второго шатуна 4, образующих с коромыслом-шатуном 5 шарнирный трехзвенник.
Коромысло-шатун 5 имеет направляющую 6 для подвижной опоры 7.
Поз. 9 обозначен актуатор, в виде которого выполнено коромысло 8, поз. 10 - крейцкопф.
Значением R1 обозначен радиус окружности, величина которого равна сумме длин второго шатуна 4 и кривошипа 1, а значением R2 - радиус окружности, величина которого равна разнице длин второго шатуна 4 и кривошипа 1. Окружности радиусов R1 и R2 определяют зону, в которой совершает возвратно-поступательные движения шарнир трехзвенника шатун - второй шатун - коромысло-шатун.
Значением R3 обозначен радиус окружности, величина которого равна длине коромысла-шатуна 5 плюс разница длин второго шатуна 4 и кривошипа 1, а значением R4 обозначен радиус окружности, величина которого равна длине коромысла-шатуна 5 за вычетом из нее разницы длин второго шатуна 4 и кривошипа 1. Окружности радиусов R3 и R4 определяют зону, в которой может перемещаться опора коромысла-шатуна.
Значением r обозначен радиус кривошипа 1.
Значением R обозначен радиус окружности, по форме которой выполнена направляющая 6 для опоры 7 коромысла-шатуна 5.
Работает предлагаемый кривошипно-шатунный механизм следующим образом.
Рассмотрим два случая работы механизма на примере, представленном на фиг. 8, в котором ползун 2 совершает максимальный ход.
В первом случае рассмотрим работу механизма с ведущим звеном ползуном 2. Подобным образом может работать двигатель внутреннего сгорания и электродвигатель с якорем поступательного движения.
Ползун 2, перемещаясь по направлению стрелки, толкает шатун 3, который вынуждает коромысло-шатун 5 совершать качательное движение вокруг опоры 7 из точки «А», первого крайнего положения, до точки «Б» (второго крайнего положения) (при этом опора 7 удерживается от перемещения своим приводом (не показан)), а второй шатун 4 вынуждает кривошип 1 совершать вращение на некоторый угол Θ. При движении ползуна 2 в обратном направлении коромысло-шатун 5 совершает качательное движение в обратном направлении, а кривошип 1, продолжая вращение, совершает полный оборот.
Поскольку центр окружности, по форме которой выполнена направляющая 6, находится в точке «Б», совпадающей с линией окружности радиусом R2, ползун 2 вернется в крайнее левое (по отношению к полю чертежа) исходное положение (и будет всегда находиться в нем при следующих циклах работы), а в крайнем правом положении будет останавливаться в зависимости от положения опоры 7 коромысла-шатуна 5 на направляющей 6 (см. положение опоры 7 в точке «В», в которой звенья изображены тонкими линиями).
При нахождении центра окружности, по форме которой выполнена направляющая 6 опоры 7 коромысла-шатуна 5, в точке, совпадающей с линией окружности радиусом R1 ползун 2 будет останавливаться в постоянном крайнем правом по отношению к полю чертежа положении, а в левом положении - в зависимости от положения опоры 7 коромысла-шатуна 5 на направляющей 6.
При перемещении опоры 7 из положения «В» в положение «Г» в любом направлении максимальная величина хода ползуна 2 становится близкой к нулю (шарнир коромысло-шатун 5 - второй шатун 4 качается вокруг опоры 7 от окружности радиусом R1 до окружности радиусом R2 и обратно).
При перемещении опоры 7 в промежуточное положение (между точками «В» (фиг. 8) и «Г» (фиг. 7)) ход ползуна 2 будет находиться между максимальным и нулевым значением и зависеть от конкретного положения опоры 7.
Кривошипно-шатунный механизм с ведущим звеном ползуном может применяться в редукторах и коробках передач с любым передаточным числом более единицы (в понижающих передачах) для изменения скорости вращения ведомого кривошипа в пределах этого числа.
Для использования этого механизма в повышающих передачах необходимо установить одноступенчатую понижающую передачу с передаточным числом, обеспечивающим необходимый диапазон передаточного числа передачи.
Рассмотрим второй случай, когда ведущим звеном является кривошип 1, а ведомым - ползун 2.
В этом случае при вращении кривошипа 1 по направлению стрелки на некоторый угол θ коромысло-шатун 5 будет совершать качательные движения вокруг опоры 7 из точки «А» в точку «Б», а ползун 2 будет совершать прямолинейное движение по направлению стрелки, совершая ход, равный S9. При совершении кривошипом 1 дальнейшего вращения ползун будет совершать прямолинейное движение в обратную сторону. При совершении полного оборота кривошипом 1 ползун 2 вернется в исходное положение. Далее работа механизма повторяется.
При нахождении центра окружности, по форме которой выполнена направляющая 6, в точке, совпадающей с линией окружности радиусом R1 ползун 2 будет останавливаться всегда в крайнем правом по отношению к полю чертежа положении, а в левом положении - в зависимости от положения опоры 7 коромысло-шатун 5 на направляющей 6.
При нахождении центра окружности, по форме которой выполнена направляющая 6, в точке, совпадающей с линией окружности радиусом R2 (как показано на фиг. 8), ползун 2 будет находиться в постоянном крайнем левом (по отношению к полю чертежа) исходном положении, а в крайнем правом положении будет останавливаться в зависимости от положения опоры 7 коромысло-шатун 5 на направляющей 6.
Кривошипно-шатунный механизм с ведомым шарниром шатун-коромысло, изображенный на фиг. 9, работает следующим образом.
При вращении кривошипа 1 по направлению стрелки на пол-оборота коромысло 8 совершает качательное движение в направлении стрелки.
При вращении кривошипа 1 еще на пол-оборота коромысло 8 совершает холостой ход в обратном направлении.
При продолжении вращения кривошипа 1 работа механизма повторяется.
Перемещение опоры 7 по направляющей 6 с помощью какого-либо привода в ту или иную сторону позволяет получить бесступенчатое, плавное изменение величины хода шарниров шатун - ведомое звено ползун или шатун - ведомое звено коромысло (и, как следствие, угла качания коромысла), а также скорости их движений во времени в диапазоне, необходимом для работы транспортной техники (автомобилей с двигателем внутреннего сгорания, электромобилей с возвратно-поступательным движением ведущего звена электродвигателя), кривошипно-коромысловых и импульсных механизмов, молотов, прессов, штампов, прижимных устройств и т.д..
Кривошипно-шатунные механизмы с одним ведущим звеном ползуном и двумя трехзвенниками, изображенные на фиг. 12 и 14, работают следующим образом.
При перемещении ведущего ползуна по направлению стрелки кривошипы, изображенные контурными линиями будут вращаться в противоположных направлениях, а в одном направлении будут вращаться кривошипы, изображенные соответственно контурной и штрихпунктирной линиями.
Кривошипно-шатунный механизм с одним ведущим звеном ползуном и двумя трехзвенниками, изображенном на фиг. 13, работает следующим образом.
При перемещении ведущего ползуна по направлению стрелки кривошипы, изображенные контурными линиями, будут вращаться в одном направлении, а в противоположных направлениях будут вращаться кривошипы, изображенные соответственно контурной и штрихпунктирной линиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-коромысловый механизм Вахрушевых (варианты) | 2019 |
|
RU2822681C2 |
| Оппозитный кривошипно-шатунный механизм | 2023 |
|
RU2820580C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Устройство компенсации уточных нитей к многоцветному бесчелночному ткацкому станку | 1985 |
|
SU1286650A1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2001 |
|
RU2256085C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Привод игол двухфонтурной основовязальной машины | 1973 |
|
SU473774A1 |
| Привод игольного двухфонтурной основовязальной машины | 1975 |
|
SU557132A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
Изобретение относится к области машиностроения, а более конкретно к механизмам преобразования вращательного движения в поступательное или колебательное. Кривошипно-шатунный механизм состоит из кривошипа (1), шарнирно соединенного с ведомым звеном (2), которое может быть ползуном или коромыслом, шатунов (3) и (4) и коромысла-шатуна (5). Шатуны (3, 4) и коромысло-шатун (5) образуют шарнирный трехзвенник. Коромысло-шатун (5) имеет подвижную опору (7) в направляющей (6). Достигается увеличение функциональных возможностей. 5 з.п. ф-лы, 14 ил.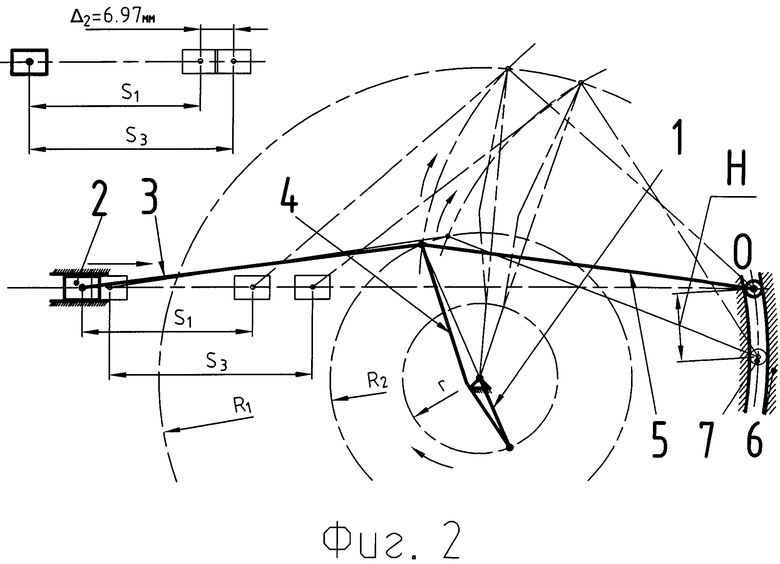
1. Кривошипно-шатунный механизм, содержащий ведомое звено, которое может быть выполнено в виде ползуна или коромысла, шарнирно соединенный с ним шатун и кривошип, образующий шарнирную пару со вторым шатуном, составляющим шарнирный трехзвенник с шатуном и коромыслом-шатуном, имеющим шарнирную опору, отличающийся тем, что в нем опора имеет возможность перемещения по направляющей, траектория которой находится в пределах зоны, определяемой окружностями, центры которых совпадают с осью вращения кривошипа, при этом радиус одной равен длине коромысла-шатуна за вычетом из нее разницы длин второго шатуна и кривошипа, а радиус второй - длине коромысла-шатуна плюс разница длин второго шатуна и кривошипа.
2. Кривошипно-шатунный механизм по п. 1, отличающийся тем, что в нем траектория направляющей опоры коромысла-шатуна выполнена по форме окружности, радиус которой равен длине коромысла-шатуна, при этом центр ее находится в зоне, определяемой окружностями, радиус одной из которых равен сумме длин второго шатуна и кривошипа, а радиус второй - их разнице.
3. Кривошипно-шатунный механизм по п. 1, отличающийся тем, что коромысло и/или кривошип выполнены изменяемыми по длине.
4. Кривошипно-шатунный механизм по п. 1, или 2, или 3, отличающийся тем, что он состоит из ползуна и двух трехзвенников, шарниры которых находятся с одной стороны относительно линии, обозначающей траекторию перемещения оси шарнира кинематической пары ползун - первый шатун, и двух кривошипов, при этом шарниры коромысло-шатун - опора имеют возможность синхронного перемещения.
5. Кривошипно-шатунный механизм по п. 1, или 2, или 3, отличающийся тем, что он состоит из ползуна, двух трехзвенников, шарниры которых находятся с разных сторон относительно линии, обозначающей траекторию перемещения оси шарнира кинематической пары ползун - первый шатун, и двух кривошипов, при этом шарниры коромысло-шатун - опора имеют возможность синхронного перемещения.
6. Кривошипно-шатунный механизм по п. 1, или 2, или 3, отличающийся тем, что он состоит из ползуна, двух трехзвенников, которые расположены зеркально относительно линии, обозначающей траекторию перемещения оси шарнира кинематической пары ползун - первый шатун и двух кривошипов, при этом шарниры коромысло-шатун - опора имеют возможность синхронного перемещения.
| RU 2012100601 A, 20.07.2013 | |||
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ | 2007 |
|
RU2352839C1 |
| Механизмы | |||
| Справочник | |||
| Изд | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| и доп., Под ред | |||
| С.Н | |||
| Кожевникова М., Машиностроение, 1976, стр | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двигатель внутреннего горения | 1923 |
|
SU903A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |

