| название | год | авторы | номер документа |
|---|---|---|---|
| Приводной механизм | 1984 |
|
SU1242666A2 |
| Приводной механизм | 1982 |
|
SU1138572A1 |
| Устройство для контактной точечной сварки | 1987 |
|
SU1426726A1 |
| Пыленепроницаемая камера | 1984 |
|
SU1296390A1 |
| Барабанные летучие ножницы | 1978 |
|
SU740418A1 |
| ПРИВОДНОЙ МЕХАНИЗМ (ВАРИАНТЫ) | 1992 |
|
RU2071578C1 |
| ОБЪЕМНАЯ МАШИНА | 2004 |
|
RU2267613C1 |
| Кулачковый механизм | 1978 |
|
SU912989A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С БЕСШАТУННЫМ МЕХАНИЗМОМ ВЛАСОВА | 1998 |
|
RU2141046C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ НА СПУТНИКЕ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2015 |
|
RU2604765C2 |
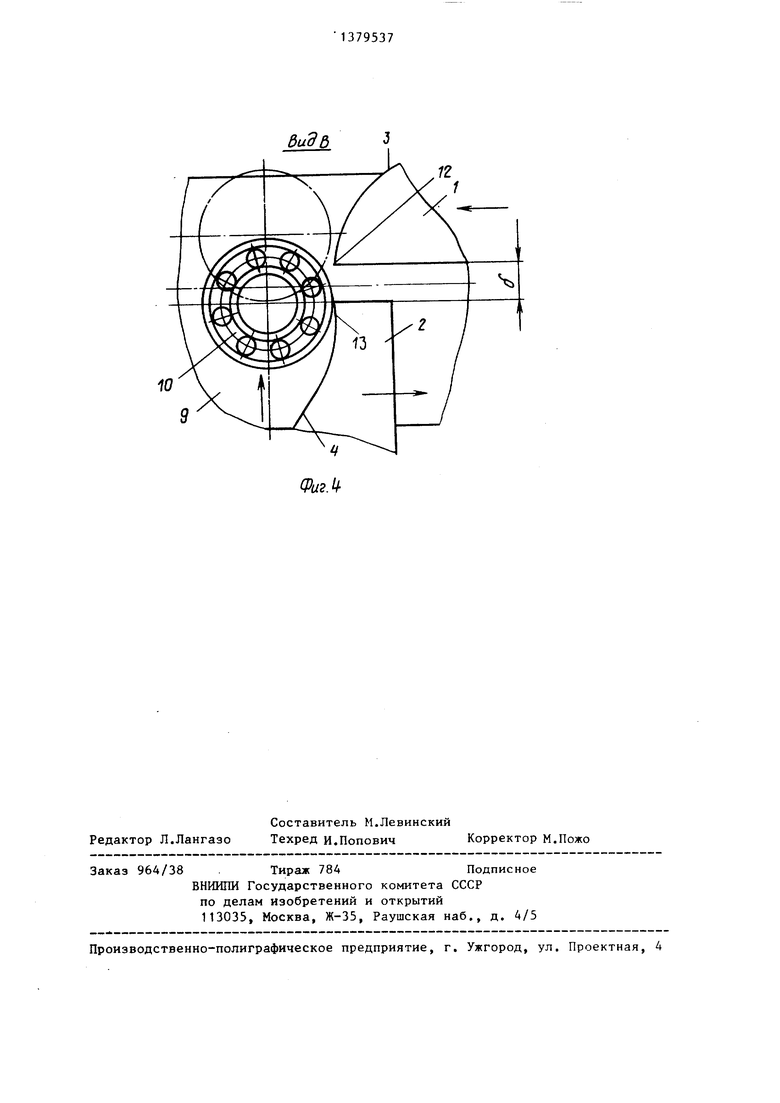
Изобретение относится к приводным механизмам двигателей и компрессоров и предназначено для преобразования прямолинейного возвратнопоступательного движения во вращательное и наоборот. Цель изобретения - упрощение конструкции. На полуцилиндрах 1, 2, 5 и 6 выполнены пазы 3, 4 и обратные или дополнительные пазы 7, 8. Пазы 3, 4 взаимодействуют с выступом 10 вала 9, а пазы 7, 8 - с дополнительным выступом 11 вала 9.. При перемещении полуцилиндров 1, 2, 5, 6 вал 9 приводится во вращение. Ведущим может быть и вал 9. Кривизна пазов переменна. 1 з.п. ф-лы, 4 ил.
10 9
(Л
со
х
ел
со
Физ.З
Изобретение относится к приводж.г механизмам двигателей и компрессог ров и предназначено для преобразования прямолинейного возвратно-поступательного движения во вращательное и наоборот.
Целью изобретения является упрощение конструкции за счет упрощения устройства синхронизации перемеще- ния полуцилиндров.
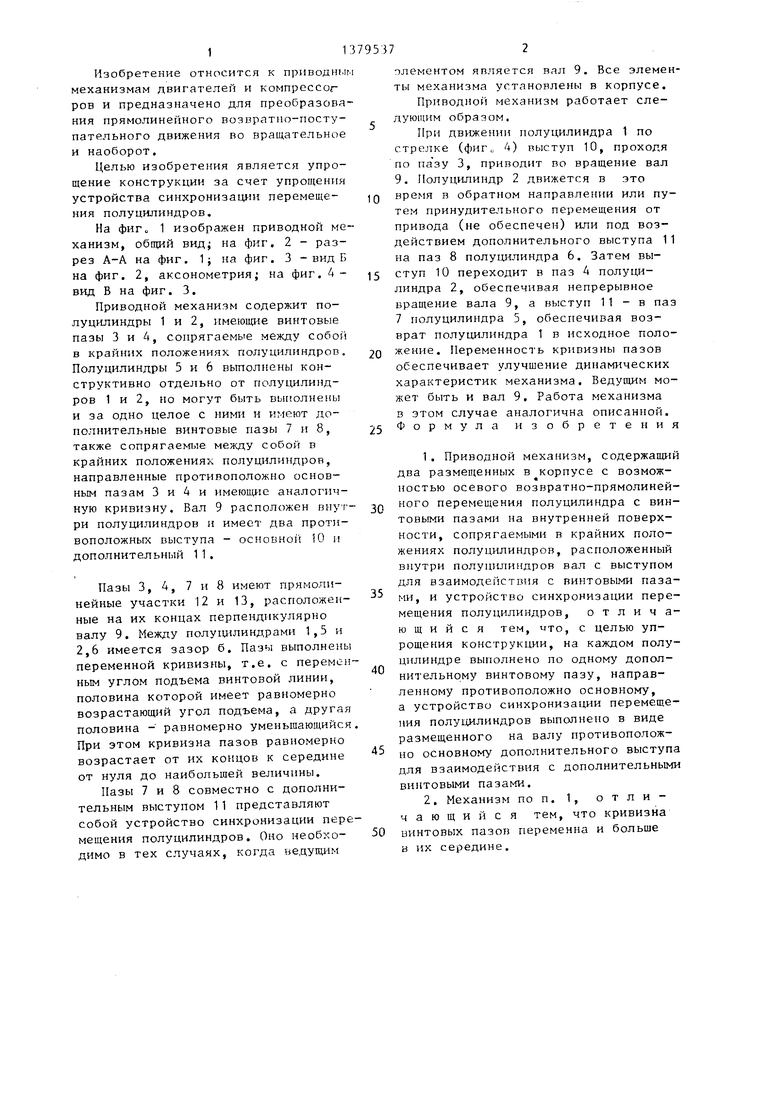
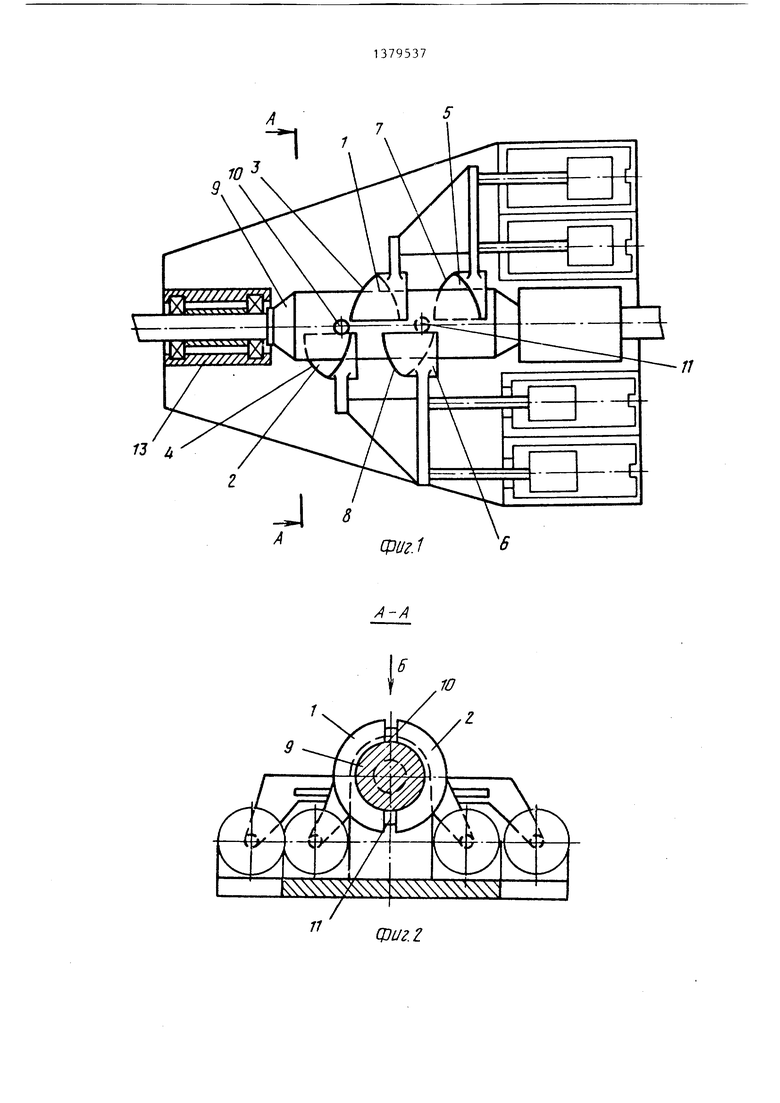
На фиг о 1 изображен приводной механизм, общий вид на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2, аксонометрия; на фиг. 4- вид В на фиг. 3.
Приводной механизм содержит полуцилиндры 1 и 2, имеющие винтовые пазы 3 и 4, сопрягаемые между собой в крайних положениях полуцилиндров. Полуцилиндры 5 и 6 выполнены конструктивно отдельно от полуцилиндров 1 и 2, но могут быть выполнены и за одно целое с ними и имеют дополнительные винтовые пазы 7 и 8, также сопрягаеьше между собой в крайних положениях полуцилиндров, направленные противоположно основным пазам 3 и 4 и имеющие аналогичную кривизну. Вал 9 расположен внут ри полуцилиндров и имеет два противоположных выступа - ocHoBHoi t 10 и дополнительный 11,
Пазы 3, 4, 7 и 8 имеют прямолинейные участки 12 и 13, расположенные на их концах перпендикулярно валу 9. Между полущшиндрами 1,5 и 2,6 имеется зазор б. Пазы выполнены переменной кривизны, т.е. с переменным углом подъема винтовой линии, половина которой имеет равномерно возрастающий угол подъема, а другая половина - равномерно уменьшающийся При этом кривизна пазов равномерно возрастает от их концов к середине от нуля до наибольшей величины.
Пазы 7 и 8 совместно с дополнительным выступом 11 представляют собой устройство синхронизации перемещения полуцилиндров. Оно необхо- димо в тех случаях, когда ведущим
Q
5
0 5 о
0
0
5
олементом является вал 9. Все элементы механизма установлены в корпусе.
Приводной механизм работает следующим образом.
При движении полуцилиндра 1 по стрелке (фиг„ 4) выступ 10, проходя по пазу 3, приводит во вращение вал 9. Полуцилиндр 2 движется в это время в обратном направлении или путем принудительного перемещения от привода (не обеспечен) или под воздействием дополнительного выступа 11 на паз 8 полуш-глиндра 6. Затем выступ 10 переходит в паз Д полуцилиндра 2, обеспечивая непрерывное вращение вала 9, а выступ 11 - в паз 7 полуцилиндра 5, обеспечивая возврат полуцилиндра 1 в исходное положение. Переменность кривизны пазов обеспечивает улучщение динамических характеристик механизма. Ведущим может быть и вал 9. Работа механизма в этом случае аналогична описанной. Формула изобретения
/J 4
Ц и г. г
дидд
| Приводной механизм | 1984 |
|
SU1242666A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
