i
сл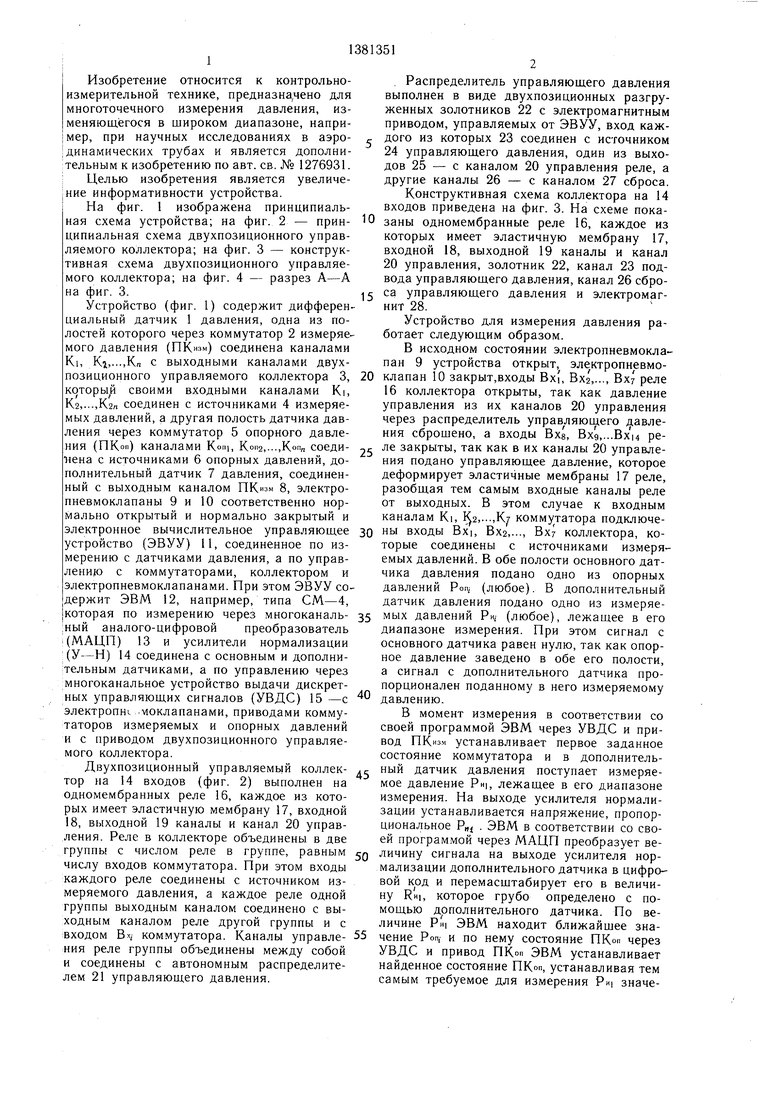
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения давления | 1985 |
|
SU1276931A1 |
| Устройство для измерения давления на аэродинамической модели | 1988 |
|
SU1569626A1 |
| Пневмопереключающее устройство для последовательного измерения давлений | 1979 |
|
SU892248A1 |
| Пневмопереключающее устройство для последовательного измерения давлений | 1980 |
|
SU918802A1 |
| Пневмопереключающее устройство для последовательного измерения давлений | 1980 |
|
SU1137363A2 |
| Пневмопереключающее устройство для измерения давления | 1982 |
|
SU1045027A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН МНОГОТОЧЕЧНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ С КОНТРОЛЕМ ФУНКЦИИ ПРЕОБРАЗОВАНИЯ И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324899C2 |
| Пневматический коммутатор газовых потоков | 1987 |
|
SU1434418A1 |
| Устройство для многоточечного измерения давления газа | 1990 |
|
SU1760419A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭЛЕКТРОАГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2009 |
|
RU2402799C1 |
Изобретение относится к области контрольно-измерительной техники. Цель нзобре- тения - увеличение информативности устр- ва. Измеряемое давление поступает в рабочую полость датчика 1, в другую полость которого уже было подано требуемое н известное с высокой точностью значения давление. На выходе усилителя 14 нормализации устанавливается напряжение, пропорциональное разности указанных давлений, которое по программе ЭВМ 12 через аналого- цифровой преобразователь 13 преобразуется в код и перемасштабируется в величину измеряемого давления. Значение последнего будет точным значением давления. ЭВМ в соответствии с программой через устройство 15 выдачи управляющих сигналов закрывает клапан 10, открывает клапан 9 и устанавливает следующее положение коммутатора 2 измеряемого давления. 4 ил.
/4
со
00
00 сл
Фиг.{
Изобретение относится к контрольно- измерительной технике, предназна,чено для многоточечного измерения давления, изменяющегося в широком диапазоне, напри- 1 мер, при научных исследованиях в аэро- Iдинамических трубах и является дополни- :тельньш к изобретению по авт. св. № 1276931. Целью изобретения является увеличе- |ние информативности устройства.
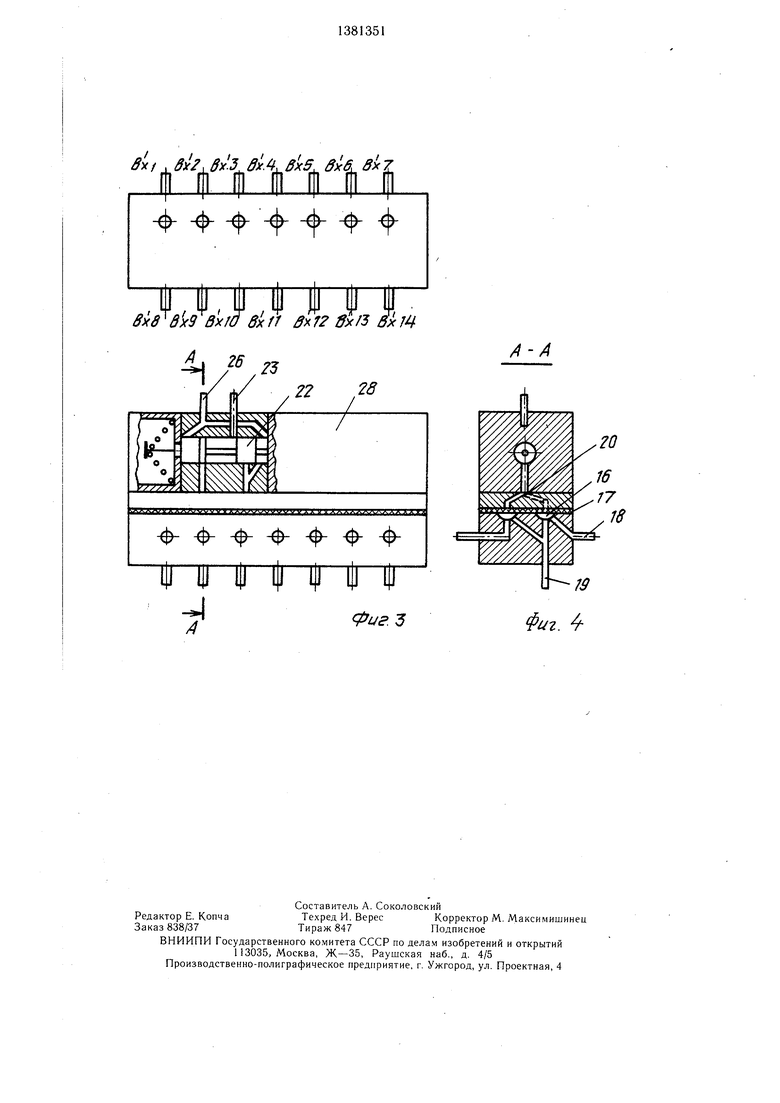
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - принципиальная схема двухпозиционного управляемого коллектора; на фиг. 3 - конструктивная схема двухпозиционного управляемого коллектора; на фиг. 4 - разрез А-А на фиг. 3.
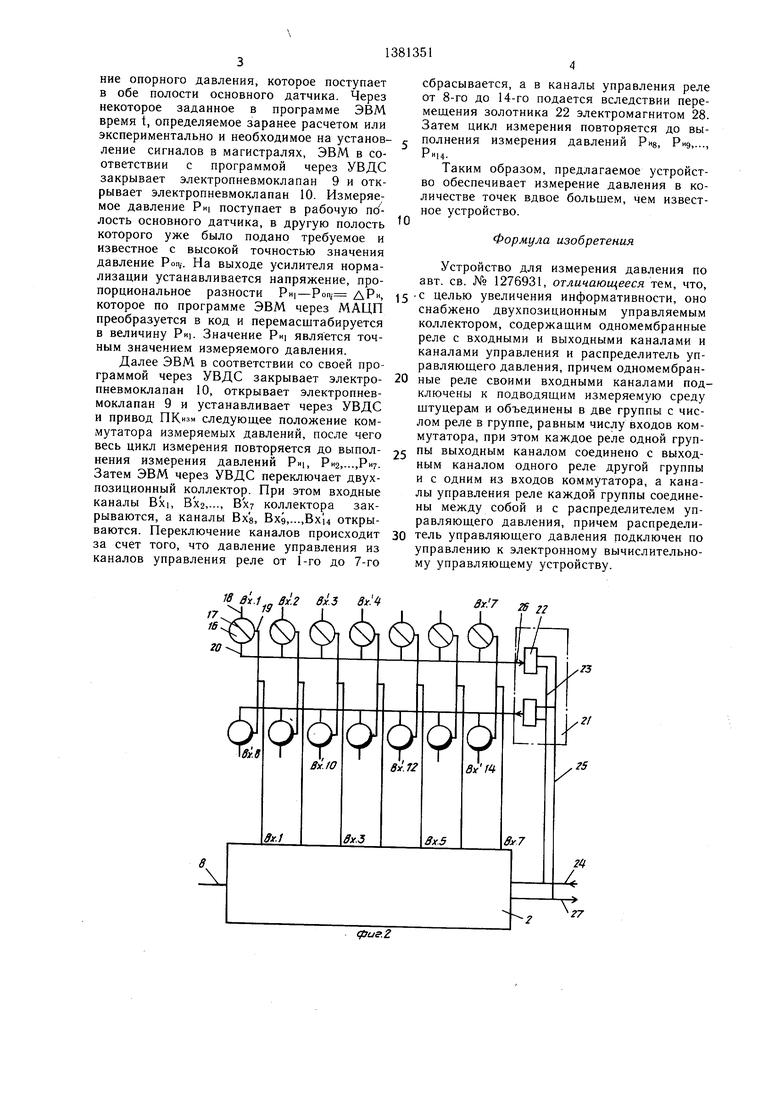
Устройство (фиг. 1) содержит дифференциальный датчик 1 давления, одна из полостей которого через коммутатор 2 измеряемого давления () соединена каналами Ki, Ki,...,Kn с выходными каналами двухРаспределитель управляющего давления выполнен в виде двухпозиционных разгруженных золотников 22 с электромагнитным приводом, управляемых от ЭВУУ, вход каж- с дого из которых 23 соединен с источником 24 управляющего давления, один из выходов 25 - с каналом 20 управления реле, а другие каналы 26 - с каналом 27 сброса.
Конструктивная схема коллектора на 14 входов приведена на фиг. 3. На схеме пока- 0 заны одномембранные реле 16, каждое из которых имеет эластичную мембрану 17, входной 18, выходной 19 каналы и канал 20 управления, золотник 22, канал 23 подвода управляющего давления, канал 26 сбро- 1г са управляющего давления и электромагнит 28.
Устройство для измерения давления работает следующим образом.
В исходном состоянии электропневмокла- пан 9 устройства открыт, электропневмопозиционного управляемого коллектора 3, 20 клапан 10 закрыт,входы Вхь Вх2,..., Вху реле который своими входными каналами Ki, 16 коллектора открыты, так как давление -- -- 20
К2,...,К2п соединен с источниками 4 измеряемых давлений, а другая полость датчика давления через коммутатор 5 опорного давлеуправления из их каналов 20 управления через распределитель управляющего давления сброшено, а входы Bxs, Bx9,...Bx i4 рения (ПКоп) каналами Ко ч, Ко112,...,Коп„ соеди- г ле закрыты, так как в их каналы 20 управлеиена с источниками 6 опорных давлений, дополнительный датчик 7 давления, соединенный с выходным каналом ПКизм 8, электро- пневмоклапаны 9 и 10 соответственно нормально открытый и нормально закрытый и
ния подано управляющее давление, которое деформирует эластичные мембраны 17 реле, разобщая тем самым входные каналы реле от выходных. В этом случае к входным каналам Кь ,...,К коммутатора подключе40
электронное вычислительное управляющее ЗО входы Bxi, Вх2,..., Вх/ коллектора, ко- устройство (ЭВУУ) 11, соединенное по измерению с датчиками давления, а по управ- ленир с коммутаторами, коллектором и электропневмоклапанами. При этом ЭВУУ со- |держит ЭВМ 12, например, типа СМ-4, |которая по измерению через многоканаль- 35 ;ный аналого-цифровой преобразователь (МАЦП) 13 и усилители нормализации ;(У-И) 14 соединена с основным и дополни- ;тельным датчиками, а по управлению через многоканальное устройство выдачи дискретных управляющих сигналов (УВДС) 15 -с электропн. .моклапанами, приводами коммутаторов измеряемых и опорных давлений и с приводом двухпозиционного управляемого коллектора.
Двухпозиционный управляемый коллек- -с тор на 14 входов (фиг. 2) выполнен на одномембранных реле 16, каждое из которых имеет эластичную мембрану 17, входной 18, выходной 19 каналы и канал 20 управления. Реле в коллекторе объединены в две группы с числом реле в группе, равным д числу входов коммутатора. При этом входы каждого реле соединены с источником измеряемого давления, а каждое реле одной группы выходным каналом соединено с выходным каналом реле другой группы и с
торые соединены с источниками измеряемых давлений. В обе полости основного датчика давления подано одно из опорных давлений Роп; (любое). В дополнительный датчик давления подано одно из измеряемых давлений Ри,- (любое), лежащее в его диапазоне измерения. При этом сигнал с основного датчика равен нулю, так как опорное давление заведено в обе его полости, а сигнал с дополнительного датчика пропорционален поданному в него измеряемому давлению.
В момент измерения в соответствии со своей программой ЭВМ через УВДС и привод ПКизм устанавливает первое заданное состояние коммутатора и в дополнительный датчик давления поступает измеряемое давление Рн|, лежащее в его диапазоне измерения. На выходе усилителя нормализации устанавливается напряжение, пропорциональное PHI . ЭВМ в соответствии со своей программой через МАЦП преобразует величину сигнала на выходе усилителя нормализации дополнительного датчика в цифровой код и перемасщтабирует его в величину R HI, которое грубо определено с помощью дополнительного датчика. По величине Р||| ЭВМ находит ближайшее знавходом Вх; коммутатора. Каналы управле- 55 чение Роп, и по нему состояние ПКоп через ния реле группы объединены между собой УВДС и привод ПКоп ЭВМ устанавливает и соединены с автономным распределителем 21 управляющего давления.
найденное состояние ПКоп, устанавливая тем самым требуемое для измерения Ри| значеРаспределитель управляющего давления выполнен в виде двухпозиционных разгруженных золотников 22 с электромагнитным приводом, управляемых от ЭВУУ, вход каж- дого из которых 23 соединен с источником 24 управляющего давления, один из выходов 25 - с каналом 20 управления реле, а другие каналы 26 - с каналом 27 сброса.
Конструктивная схема коллектора на 14 входов приведена на фиг. 3. На схеме пока- 0 заны одномембранные реле 16, каждое из которых имеет эластичную мембрану 17, входной 18, выходной 19 каналы и канал 20 управления, золотник 22, канал 23 подвода управляющего давления, канал 26 сбро- г са управляющего давления и электромагнит 28.
Устройство для измерения давления работает следующим образом.
В исходном состоянии электропневмокла- пан 9 устройства открыт, электропневмо0 клапан 10 закрыт,входы Вхь Вх2,..., Вху реле 16 коллектора открыты, так как давление -- -- 20
клапан 10 закрыт,входы Вхь Вх2,..., Вху реле 16 коллектора открыты, так как давление -- -- 20
управления из их каналов 20 управления через распределитель управляющего давления сброшено, а входы Bxs, Bx9,...Bx i4 реле закрыты, так как в их каналы 20 управления подано управляющее давление, которое деформирует эластичные мембраны 17 реле, разобщая тем самым входные каналы реле от выходных. В этом случае к входным каналам Кь ,...,К коммутатора подключеn i входы Bxi, Вх2,..., Вх/ коллектора, ко-
0
О входы Bxi, Вх2,..., Вх/ коллектора, ко- 5
с д
торые соединены с источниками измеряемых давлений. В обе полости основного датчика давления подано одно из опорных давлений Роп; (любое). В дополнительный датчик давления подано одно из измеряемых давлений Ри,- (любое), лежащее в его диапазоне измерения. При этом сигнал с основного датчика равен нулю, так как опорное давление заведено в обе его полости, а сигнал с дополнительного датчика пропорционален поданному в него измеряемому давлению.
В момент измерения в соответствии со своей программой ЭВМ через УВДС и привод ПКизм устанавливает первое заданное состояние коммутатора и в дополнительный датчик давления поступает измеряемое давление Рн|, лежащее в его диапазоне измерения. На выходе усилителя нормализации устанавливается напряжение, пропорциональное PHI . ЭВМ в соответствии со своей программой через МАЦП преобразует величину сигнала на выходе усилителя нормализации дополнительного датчика в цифровой код и перемасщтабирует его в величину R HI, которое грубо определено с помощью дополнительного датчика. По величине Р||| ЭВМ находит ближайшее зна чение Роп, и по нему состояние ПКоп через УВДС и привод ПКоп ЭВМ устанавливает
найденное состояние ПКоп, устанавливая тем самым требуемое для измерения Ри| значение опорного давления, которое поступает в обе полости основного датчика. Через некоторое заданное в программе ЭВМ время t, определяемое заранее расчетом или экспериментально и необходимое на установление сигналов в магистралях, ЭВМ в соответствии с программой через УВДС закрывает электропневмоклапан 9 и открывает электропневмоклапан 10. Измеряемое давление Pni поступает в рабочую полость основного датчика, в другую полость которого уже было подано требуемое и известное с высокой точностью значения давление Роп/. На выходе усилителя нормализации устанавливается напряжение, про10
сбрасывается, а в каналы управления реле от 8-го до 14-го подается вследствии перемещения золотника 22 электромагнитом 28. Затем цикл измерения повторяется до выполнения измерения давлений Рив, ,...,
Ри14.
Таким образом, предлагаемое устройство обеспечивает измерение давления в количестве точек вдвое большем, чем известное устройство.
Формула изобретения
Устройство для измерения давления по
.....- t- --Г- - ° 1276931, отличающееся тем, что,
порциональное разности , дРи, целью увеличения информативности, оно которое по программе ЭВМ через МАЦПснабжено двухпозиционным управляемым преобразуется в код и перемасштабируетсяколлектором, содержащим одномембранные в величину Ри. Значение Ри) является точ-реле с входными и выходными каналами и ным значением измеряемого давления.каналами управления и распределитель уп- Далее ЭВМ в соответствии со своей про-равляющего давления, причем одномембран- граммой через УВДС закрывает электро-20 ные реле своими входными каналами под- пневмоклапан 10, открывает электропнев-ключены к подводящим измеряемую среду моклапан 9 и устанавливает через УВДСштуцерам и объединены в две группы с чис- и привод ПКизм следующее положение ком-лом реле в группе, равным числу входов коммутатора измеряемых давлений, после чегомутатора, при этом каждое реле одной груп- весь цикл измерения повторяется до выпол-25 выходным каналом соединено с выход- нения измерения давлений Ри Ри2,...,Ри7.ным каналом одного реле другой группы Затем ЭВМ через УВДС переключает двух-и с одним из входов коммутатора, а кана- позиционный коллектор. При этом входныелы управления реле каждой группы соедине- каналы Bxi, 8x2,..., Вх коллектора зак-ны между собой и с распределителем уп- рываются, а каналы Bx s, Bx9,...,Bx i4 откры-равляющего давления, причем распредели- ваются. Переключение каналов происходит30 тель управляющего давления подключен по за счет того, что давление управления изуправлению к электронному вычислительно- каналов управления реле от 1-го до 7-гому управляющему устройству.
JS elt. вх.2 8х. . «
га
ШУ
Вх.Ю
л-./
8
сбрасывается, а в каналы управления реле от 8-го до 14-го подается вследствии перемещения золотника 22 электромагнитом 28. Затем цикл измерения повторяется до выполнения измерения давлений Рив, ,...,
Ри14.
Таким образом, предлагаемое устройство обеспечивает измерение давления в количестве точек вдвое большем, чем известное устройство.
Формула изобретения
25 22
,гз
Р
J W
л-.з
8х.5
ЗУ
4
/
8)(f ,...B)(5. дуб. 8)7 f|l f}l jl I fp fl Ijl
ill 1 , ll IJJ )|l ill
e()(9 B)(U вхП S)(72 ,
ff(/3 вжШ
ijl Ц ill ij IJJ l|j llj
A-A
Фиг. 5
| Устройство для измерения давления | 1985 |
|
SU1276931A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
