Изобретение относится к измерениям в телевизионной технике, в частности к измерению параметров отклоняющих катушек.
Цель изобретения - повышение точности измерения.
Поставленная цель достигается тем что согласно способу измерения рас- пределения витков отклоняющих кату- шек, включающему измерение тока индукции, пропорционального изменению магнитного поля между отклоняющей катушкой и магнитоиндукционным датчиком, расположенным вдоль оси откло- няющей катушки, измеряют ток индукции, пропорциональный изменению взаимоиндукции между отклоняющей катушкой и магнитоиндукционным датчиком, при вертикальном перемещении магнито индукционного датчика в плоскости симметрии отклоняющей катушки, регистрируют минимальный и максимальный токи индукции, соответствующие минимальной и максимальной величинам взаимоиндукции между отклоняющей катушкой и магнитоиндукциониым датчиком при его перемещении, и расстояние между соответсвующим расположением магнитоиндукционного датчика соот ветствующее минимальному и максимальному токам индукции, с последующим вычислением параметров распределения витков отклоняющей катушки.
На чертеже изображена отклоняющая катушка с датчиком напряженности магнитного поля, разрез.
Устройство для измерения распределения витков отклоняющих катушек содержит отклоняющую катушку 1, магни- тоиндукционный датчик 2, источник 3 синусоидального напряжения.
Устройство работает следующим образам.
Отклоняющую катушку 1 подключают к источнику 3 синусоидального напряжения. Затем устанавливают магнитоин дукционный датчик 3 на пересечении опорной плоскости отклоняющей катуш- ки 1 и плоскости ее симметрии, т.е. вдоль центральной оси катушки.
Установку датчика можно выполнить, например, при помощи координатного станка. Датчик 2 напряженности магнитного поля может быть выполнен в виде плоской катушки.
После установки магнитоиндукционного датчика 2 измеряют ток взаимоиндукции 1д,цц отклоняющей катушки 1 и магнитоиндукционного датчика 2.
Затем магнитоиндукционный датчик 2 перемещают в плоскости симметрии отклоняющей катушки 1 вертикально вверх см. чертеж) и при этом непрерывно контролируют величину тока взаимоиндукции. Перемещение прекращают при достижении наибольшей величины тока взаимоиндукции величину измеряют и фиксируют. При этом магнитоиндукционный датчик оказывается на прямой, соединяющей центры распределения витков измеряемой отклоняющей катушки. После этого измеряют и фиксируют величину D перемещения магнитоиндукционного датчика. По измеренным величинам Т/, I и D вычисляют Уд угловую координату центра распределения витков отклоняющей катушки, и Х: характеристику угловой дисперсии витков отклоняющей катущки по формуле
у ,,с. -LMXH - У/УСгде 1 - длина датчика;
К - коэффициент, характеризующий технические характеристики магнитоиндукционного датчика D - величина перемещения датчика, соответствующая минимальному и максимальному значениям тока индукции. Эти зависимости наиболее удобно представить в виде расчетных таблиц или номограмм. Для измерения и контроля взаимоиндукции используются методы измерений: мостовой, баллистический, ahmepMerpa - вольтметра.
QffOpHOJi / /focf aofrrb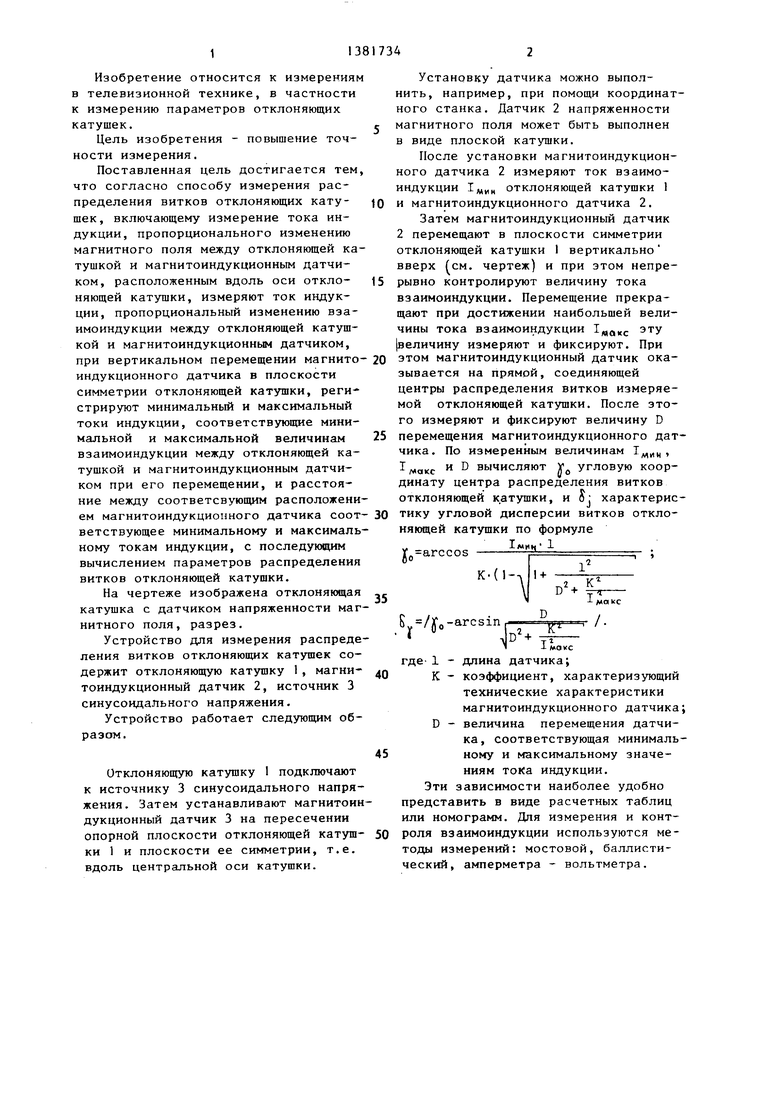
| Способ контроля параметров сведения отклоняющих систем многолучевых кинескопов | 1974 |
|
SU560365A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для измерения параметров сведения и геометрических искажений магнитного поля электромагнитных отклоняющих систем | 1974 |
|
SU628637A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
