Изобретение OTIU CUICH к гредствпм nepaspyiiininmero )ля объектоп радийциониьтми методлкп с использованием вычисли7 ельньг ; средств пбсста- новления H3o6paKefinH.
Цель изобретения - гговып е1тие производительности.
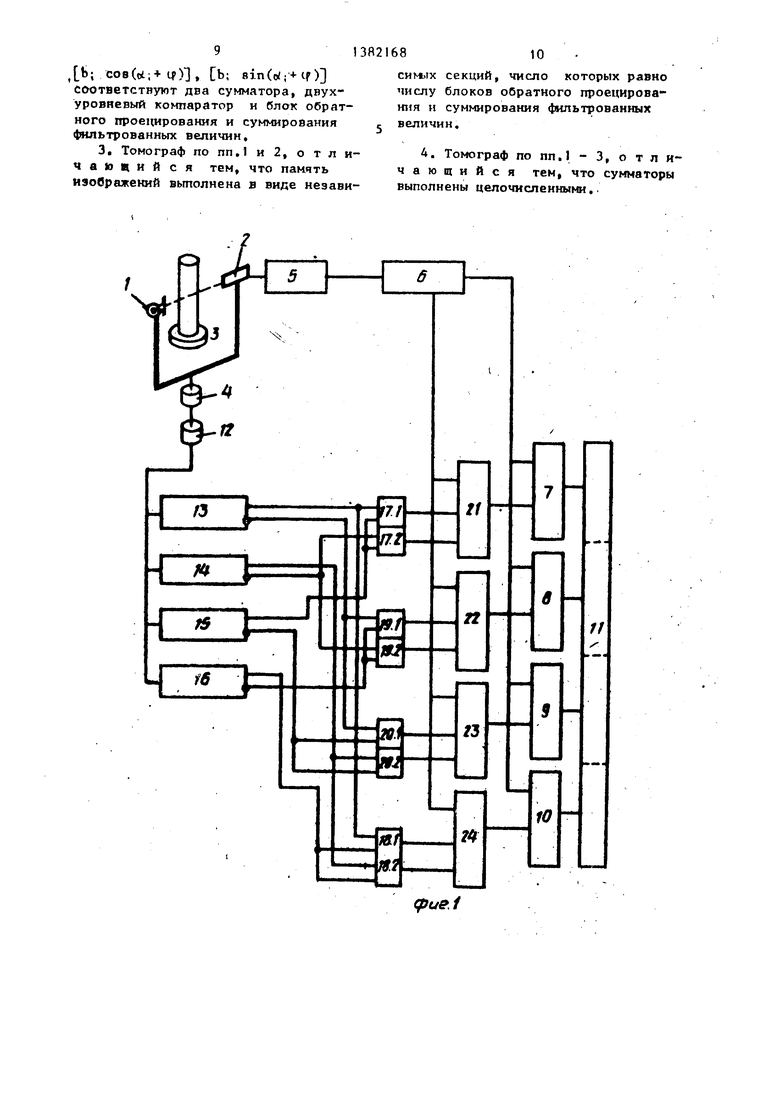
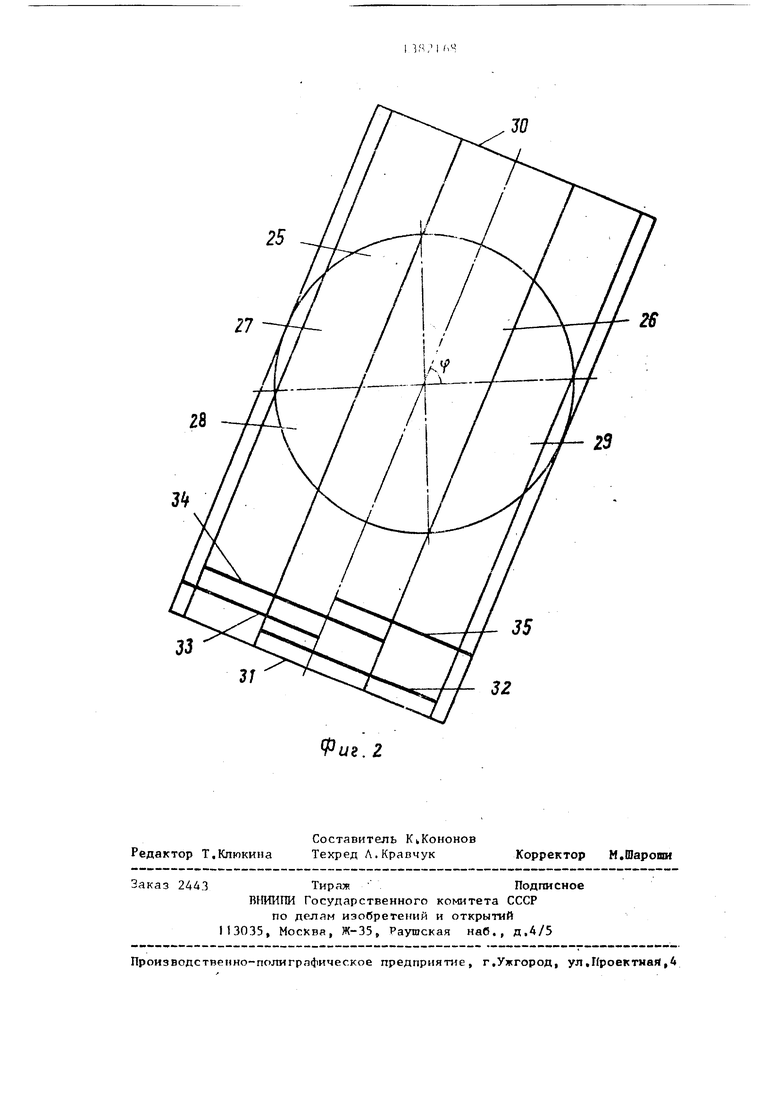
На фиг. изображена структурная схема вычислительного томографа; на фиг. 2 - схема распределеттия информации между блоками обратного проецирования и суммиропания фильтрованных величин.
Вычислительный томограф содержит источник 1 проникающего излучения, распрложениъй напротин Олока 2 детекторов, держатель 3 исследуемого объекта, которьй располагается между источником i и блоком 2 детек- торовJ средства для приведения источника 1 и блока 2 детекторов в движение относительно дер) лтеля 3 исследуемого объекта, блок 5 предварительной обработки сигналов детекто- ров, подключенный к блоку 2 детекторов, блок 6 пространственно-частотной фильтрации, подключенный к блоку 5 предварительной обработки сиг- налоЕ детпкторов. Клоки -;брат- ного проецирования и суг-п фовчния фильтрованных вепг.чик, чиг.ло которых равно числу квадрантов ияобра жения, информационными входами подключены к информационному пходу блс- ка 6 пространственно-частотной фильт pauf:H, Память 1 изображений соеди- нен5 с блоками 7-10 обратноз о проецирования и суммиройания фильтровальных величин. Рлок 12 датчиков прост- ранствеиннх коорД1-гиат входом сое;1йне со средеТвам 6 для приведения источника I и блока 2 я зтектсров в движение относительно ;.,сржатг л;-; 3 исследуемого об текта, а пыходом - с v. входами блока 13 npeof pa iOiiannn г coatf, блока 14 преоОрчзоьания г sintfj, блока 15 преобразования Ь; cos (fti, + Cf)J , блока if преобразования Ь; sin (е/, + ц ) , г.-е г равно ОТНОШП1П11О радиуса оп.пас nt рекон- струкции к п (п },2,.,,)
tf - угол поворота источчика и блока детекторов отиогит з,л но объекта;
Ь; - расстояние от воссга- нпвливаемого изоГ|рлг:ения цо бпижайрюй неррп им i-ro фрагМ(3нта изображения пертюго
квадранта; ftl; - угол между пектором Ь| и поло
жительным направлением оси
восстанавливаемого
ипобрпж ния,
Каждому из четырех квадратттов изображения соответствуют два сумматора 17„1, 17.2, 18.1, 18.2, 19.1, 19.2, 20.1, 20„2 и один двухуровневый коьтара ор 21, 22, 23, 24 ветственно с пороговыми и информационным входами. Прямой выход блока 13 преобразования г cos p соединен с первыми входами первого сумматора 7.1 первого квадранта и первого сумматора 18,1 четвертого квадранта, а его инверсный выход соединен с первыми входами первого сум :атора 19.1 Т1 Г(;рого квадранта и первого сумматора 20.1 тт етьего квадранта. Прямой ;)Ыход блока 1А преобразования г сор;;инен с первыми входами второго сумматора 20.2 третьего и второго сумматора 18.2 четвертого :иадрантов, его инверсный выход соединен с первыми входами второго сумматора 17.2 первого квадранта и второго сумматора 19,2 второго квадранта. Прямой выход блока IS преобразования Ъ ; сок (ly.; Ц )j соединен с вторыми входами сумматоров 7.1, 17.2 первого квадранта, а его инверсный выход соедицвн с вторыми входами пары сумматоров 20, третьего квадранта. Прямой выход блока ,16 преобразования ь; sin (6i;+Cf)3 соединен с вторыь И входами пары сумматоров 18.1, 18.2 четвертого квадран- , а его нгперсный выход соединен с вторыми входами пары сумматоров 19.1, 19о2 второго квадранта. Выходы обоих сумматоров квадранта подключеин к пороговому входу двухуровневого компаратора соответствующего квадранта, информационные входы всех двухуровневых компараторов соедине гы с выходом номера измерения блока 6 пространственно-частотной фильтрации, а их выходы - с входами разрегчения информации соответствующих блоков 7-10- обратного нропшрова нип и сум чиропзния фильтрованных величин -
Вычислительный томограф работает следую11|Т1м образом.
Источник 1 нрокикакипего излучения coBMcoTFio Г бггоком 2 детскторгш скапирует объект, устаноапепиый в держателе 3. С выхода 2 детекторов сигналы, связанные с HtiTeiicHB- ностью регистрируемого излучения через блок 5 предварительной обработки сигналов детектора, поступают в блок 6 пррстранствеино-частотной фильтрации, где обрабатываются по известному алгоритму. Сигналы с выхода блока 12 датчиков пространственных координат, характериэ тогдир угловые перемещения источника 1 и блока 2 детекторов относителыго исследуемого объекта, то есть угол if поступают на блоки 13-16 преобразования г coscfl, г , Ъ , соя( + if), b; sin(ti; +q). Эти блоки
l3-lfi преобразорлипя Nfor-yr быть ni-i- полиеиы и РИде постоинимх ЮП01Х устройстп. Спгттлль с пыхолоп этих блокои 3-16 пр«;Г;Г разопаиил в описанном в, порч/тко огтуплк Т на пары сумматороя 17.1, Г/.., 1Н,1, 18,2, 19,, 19.2, 20.1, 2П,2, пл выходах KOTOpJ.ix пол чл1- гс:я чнслл,
paBHf.ie начальио -г. и конечному исчю- .рам отфн- .ь гровг.нпьгк значеи --, отпо- СЛ1Я11ХСЛ к данноьту фрагменту. В общем виде яачало отсчрта опрел.еляетсн как Ь; cos(oi;(.f) г coscf, а конец
отсчета как Ь; cos ( Ч ) г sin(.
Данные, получепннс с использованием прппеде}П1Я, даны в таблице .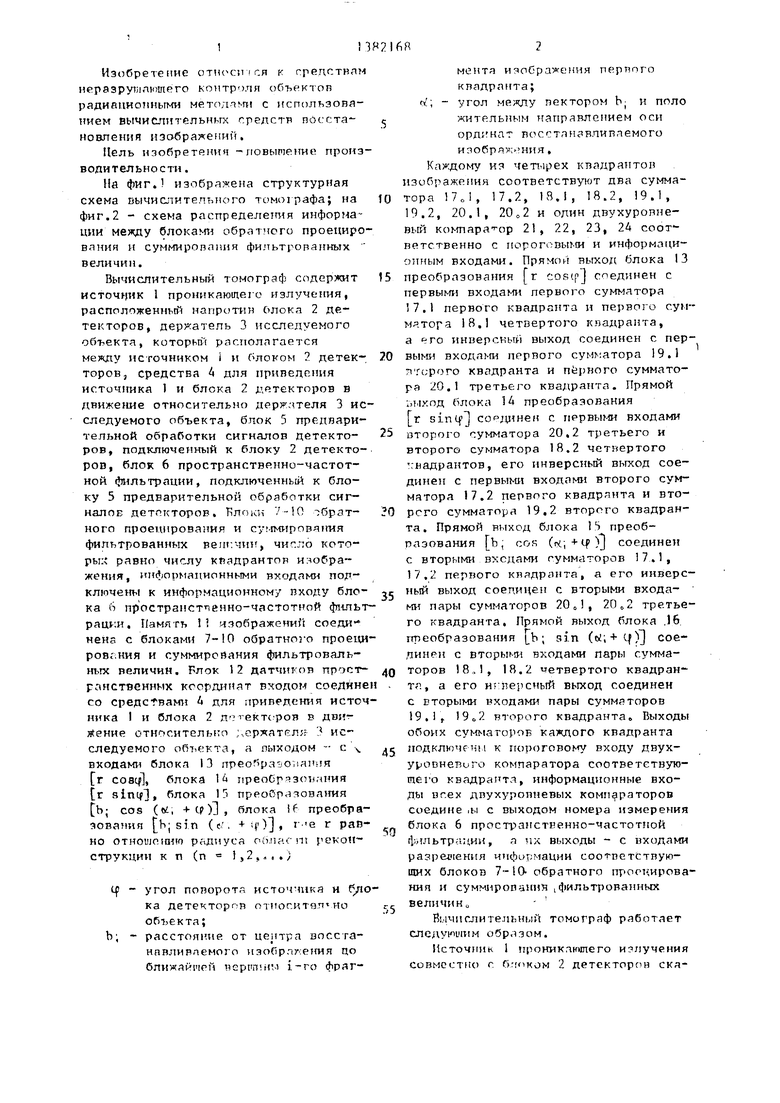
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительный томограф | 1987 |
|
SU1518744A2 |
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| Аналоговое вычислительное томографическое устройство | 1987 |
|
SU1499379A1 |
| Устройство для рентгеновской поперечной томографии | 1987 |
|
SU1482396A1 |
| Обратимый преобразователь координат | 1975 |
|
SU590765A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СРЕДА ДОЛГОВРЕМЕННОГО ХРАНЕНИЯ ИНФОРМАЦИИ | 2011 |
|
RU2510080C2 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| Устройство для преобразования прямоугольных координат в полярные | 1988 |
|
SU1515179A1 |
| Аналого-цифровой преобразователь | 1985 |
|
SU1322477A1 |
Изобретение относится к средствам неразпушающего контроля объектбв радиационн1 а4и методами с испольэова- fmeM вычислительных средств воеста - новленйя изображения. Цель, изобретения - повышение производительности. Для этого в вычислительном томографе осуществлена раздельная обработка информации, распределяемой между несколькими блоками 7-10 обратного проецирования с помощью дополнитель- но введенных блоков 13-16 преобразо- ваи.ия fr coscf, t sincfj, b; cos (Ы ,+ ) Ь; sin(oi; ff) , где отношению радиуса области реконструкции к п(. 2,...) J if угол поворота источника и блока детекторов относительно объекта; Ь; - расстояние от центра восстанавливаемого изображения до ближайшей вершины i-ro фрагмента изобра рения первого квадранта; 4L - угол между вектором Ь; и положительным направлением оси ординат восстанавливаемого изображения, пар 17.1, 17.2 - 20.1, 20.2 сумматоров и двухуровневых компараторов 21-24. зтом память II изображений может g быть выполнена в виде независимых секций. 2 з.п. ф-лы, 2 иЛ., I табл. (//
III-Ь; cos(oi ; q )- г coscf f-b; cos(ot-, + Cf ) г sintf
IVb; 3ir.(oti - (-p ) r sincf b: sin-( of.; + Lf ) - г cosg
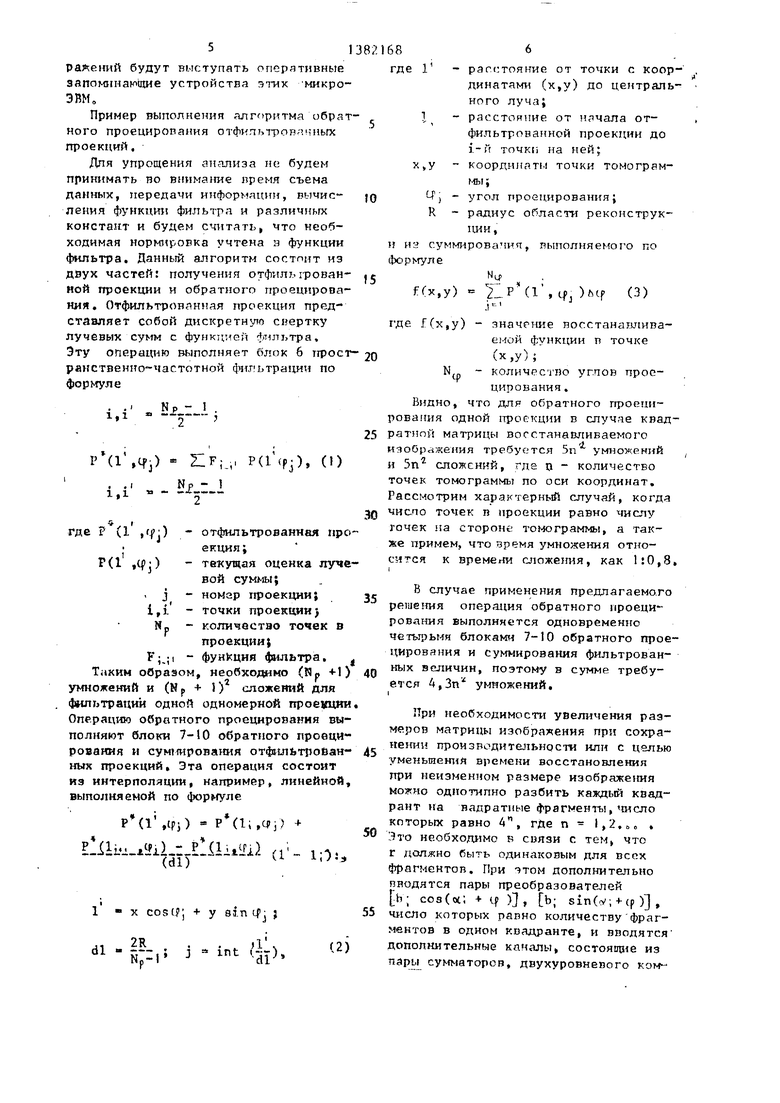
Ha фиг,2 показана геометрия разделения информации между блоками 7-10 обратного проецирования и суммирования } шьтрованных величин в случае, если b 0. Область 25 реконструкции разбита на четыре квадранта 26-29, и при движении источника 1 по траектории 30 на отрезке 31 блока 2 детекторов можно выделить отрезки, относящиеся к определенному квадранту: отрезок 32 - к первому квадранту 26, отрезок 33 - к второму квадранту 27, отрезок 34 - к третьему квадранту 28, отрезок 35 - к четвертому квадранту 29, Координатами начала и конца отрезка 31 на линии блока 2 детекторов являются соответствующие значения текушего номеГв отфильтрованной величины. Числа с выходов сумматоров 17.1, 17.2, 18,1, 18.2, 19.1, 19.2, 20.1, 20.2 поступают на пороговые входы двухуровневых компараторов 21-24, а на информационные входы этих компараторов поступает номер того отфильтрованного значения, которое присутствует в данный момент на входах блоков 7-10
5
0
5
0
5
обратного проецирования и суммирования фильтрованных величин. Каждый из двухуровневых компараторов 21-24 может быть выполнен в виде пары компараторов. На выходе которых появлАвт - ся логическая единица, если значскне на информационном входе больше поро гового. Выхсзды этих компараторов 21- 24 соединены по схеме Неэквивалентность. Сигналы с выходов двухуровневых компараторов 21-24 поступают на входы разрешения приема информации соответствукадих блоков 7-10 обратного проецирования и суммирования фильтрованных величин. При логической едннице на этои входе отфильтрован- иое значение величин принимается в. блоки 7-10 обратного проецирования и суммирования фильтрованных величин. Далее блоки 7-10 обратного проецирования и суммирования фильтрован- величин производят обратное проецирование и суммирование по известному алгоритму в памяти изображе гий.| ти блоки могут быть выполнены в виде микроэвм. В этом случае в качестве независимых секций памяти 1I изоб
51
ражел ий будут выступать оперятивные запоминающие устройства этих микро- ЭВМ„
Пример выполнения алгоритма обратного проецирования отфиль1рова 1нь х проекций.
Для упрощения анализа не будем принимать во внимание время съема данных, передачи информации, вычис- ления функции фильтра и различных констант и будем считать, что необходимая HopMJipoBKa учтена н функции фильтра. Данный алгоритм состпнт из двух частей: получения отфильтрован- иой проекции и обратного проецирования. Отфильтрованная проекция представляет собой дискретную снертку лучевых сумм с функцией ф1Т1льтра, Эту операцию выполняет блок 6 прост- ранственно-частотной фильтра Д И по фор куле
. .1 NP - 1
1,,
P (l , - ZlF; ,, P(l (p-), (I)
t I 1.1
-
V r
где P (1 ,) - отфильтрованная проекция;
P(l ,{f:) - текущая оценка лучевой суммы;
. j - номар проекции;35
i,i. - точки проекции) NP - количество точек в
проекции;
F;,;i фун |:ция фильтра. Таким образом, необходимо (Нр +1) 40 умножений и (N р + J ) сложет1Й для фильтрации одной одномерной проекции. Операцию обратного проецирования выполняют блоки 7-10 обратного проеци ровакия и сумтшрования отфильтройан- 45 ных проекций. Эта операция состоит иэ интерполяции, например, линейной, выполняемой по
P d .tfj) - Р(1;,сп) - .z fiLr P ibtLfAl (I-- i;..
1 X у ain if; ;
-i-ifz,i 3-int;ii). «i
.5
21
Q j 0
5
0
5
0 5
0
5
686
где 1 - рагстояние от точки с координатами (х,у) до центрального луча;
1 - расстояние от илчала отфильтрованной проекции до i-й точки на ней; х,у - координаты точки томограммы;
Уj - угол проецирования; R радиус области реконструкIWH,
и из суммировамип, выполняемого по фop тy7Ie
Ny.
fCj.y) JI P (i tfj )btf (3)
.1
где f(x,y) - значение восстанагшива- еиой функции Г) точке (х,у) ;
N - количесттю углов проецирования.
Видно, что для обратного проецирования одной проекции в случае квадратной матрицы восстанавливаемого изображения требуется 5ii множений и 5п сложений, где о - количество точек томограммы по оси координат. Рассмотрим характерный случай, когда число точек п проекции равно числу точек на стороне TOt-юграммы, а также примем, что время умножения относится к времени сложения, как 150,8, I
В случае применения предлагаемого реше шя операция обратного проеци - ровакия выполняется одновременно четьфьмн блоками 7-10 обратного проецирования и суммирования фильтрованных величин, поэтому в сумме требуется 4,3п умножений, I
При необходимости увеличения размеров матрицы изображения при сохранении производительности или с целью уменьгает я времени восстановления при неизменном размере изображения можно однотипно разбить каждый квадрант на вадратиые фрагменты, число которых равно 4, гДе п 1,2.„. Это необходимо в связи с тем, что г должно быть одинаковым для всех фрагментов. При этом дополнительно вводятся пары преобразователей h; соа((ц; -« Cf ) , b; sin(cy;+ ср ) , число которых равно количеству фра - ментов в одном квадранте, и вводятся дополнительные каналы, состояние из пары суьматоров, двухуровневого ком
паратора, блока обратного проециропп ;ния и суммпровянил фильтрованных величии, причем число этих канллоп в ка эдом квадранте pnBt o чиспу пар пре обр азов а тел ей iv cos (о;; - ср j , Ь; зтп((У; + tp Я.
Так как блоки обратного проецирования и суммирования фильтрованных величин могут одновременно обр,дп(атг ся к памяти изображений 5 для умоиыпе ния времени простоев и, слр1;оватсль но, увеличения npoизnoдитeль focтv память иаображе1тЛ быть выполг иена в виде независимых секций, чис- ло которых равно числу блоков обратного проецирования и суммнроэ.яняя фильтрованных величин.
Поскольку блок пространственно- частотной фильтрации вь;дяет конечное число фильтрован|{ьгх величин дпя упрщения двухуровневмх комларлторол и сумматоров, посладние могут быть выполнены нoлoчнгJleнны rи.
Формула изобретении
1 о Вычислительный томограф, содержащий источник проникающего излучения, блок детекторов, держатель исследуемого объекта, средства для приведения источник и блока детекторов в движение относительно держателя исследуемого объекта, блок предварительной обработки сигналов детекторов, подключенный к блок пространственно-частотной филырапии блок обратного проецирования и суммирования фильтрованных величин, подключенную к нему память изображений, елок датчиков пространственных координат, входом подключе.нньт к средствам для приведения источника и блока детекторов в движение, а Выходами - к блоку предварительной обработки сигналов детекторов, о т- личающийся тем, что, с целью повьш1ения производительности в него введены дополнительные блоки обратного проецирования и суммирования фильтрованных величин, блоки преобразования г costpj, г sinCfJ, b; cos(oii + LP ) , b; sin(n:; + cf ) где r равно отноигению радиуса области реконструкции к п(,2,.,.)J tf - угол поворота источника и блока детекторов относительно Ь, расстояние от центра восстанавливаемого изббражения до ближаГичгй неридл- ны 1-го фрагмента изобрс шения пепво
,
to (5
20 25
О Q с 5
5
го квадранта; г/; - угол между вектором Ь; И лоложительным направлением оси ординат восстанавливаемого изоб- ражет1Я, пергьш и второй сумматоры и двухуровневый компаратор для каждого квадранта изображения, причем блоки преобразования г cosLfj, г slnLf Ь; cos( ;; + if ) , Ь, sin( + If ) нходами подключены к блоку датчиков пространственных координат, прямой выход блока преобразования г costf подключен к первым входам первых сум маторов первого и четвертого квадрантов изображе1гии, его инверсный выход - к первым входам первых сумматоров второго и третьего квадрантов изображения, прямой выход блока пре образования г sinq подключен к пер- входам вторых сумматоров третьего и - етяертого квадрантов изображения, а его И1и1оусный выход - к пер- входам втс рых сумматоров первого и второго квадрантов изображения, прямой В1-1ХОД блока преобразования Ь, cos (ol; -I- Lf )j подключен к вторым входам сумматоров первого квадранта изображения, а его инверсный выход - к вторым входам сумматоров третьего квадранта изображения, прямой выход блока преобразования Ь; sin(oi.; tp ) подключен к вторым входам сумматоров четвертого квадранта изображения, а его инверсный выход - к вторым входам сумматоров второго квадранта изображения, выходы сумматоров каждого квадранта изображения подключены к пороговым входам Двухуровнего компаратора того же квадранта изображения, выход которого подключен к входу разрешения соответствующего дaннo fy,квадранту изображения блока обратного проецирования и суммирования фильтрованных величин, причем информационные входы всех двухуровневых компараторов подключены к допол1ттельному выходу номера измерения блока пространственно-частотной фильтрации, а работ чие всех блоков обратного про- ешфования и суммирования фильтр; ван- ных величин подключены к рабочему выходу блока пространственно-частотной фильтрации,
,Ь; C08(ot;+ ц) , Ь; 81п(о i If )
соответствуют два сумматора, двухуровневый компаратор и блок обратного проецирования и суммирования фильтрованных величин,
3, Томограф по пп,1 и 2, о т л и- чаюцийся тем, что памчть изображений вьтолнена в виде незави13В216810
симлтх секций, число которых равно числу блоков обратного проецирования и суммирования фильтрованных с величин.
gjuf.l
25
21
28
J33
з;
.2
30
25
J5
32
| Устройство для управления трехфазным инвертором | 1985 |
|
SU1283915A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
