СП
00
4
Изобретеип .: относится к реятге- ионской вычислительной томографии.
Цель изобретения - попышение пространственного разрешения и произ- нодительности, а также снижение лучевых нагрузок.
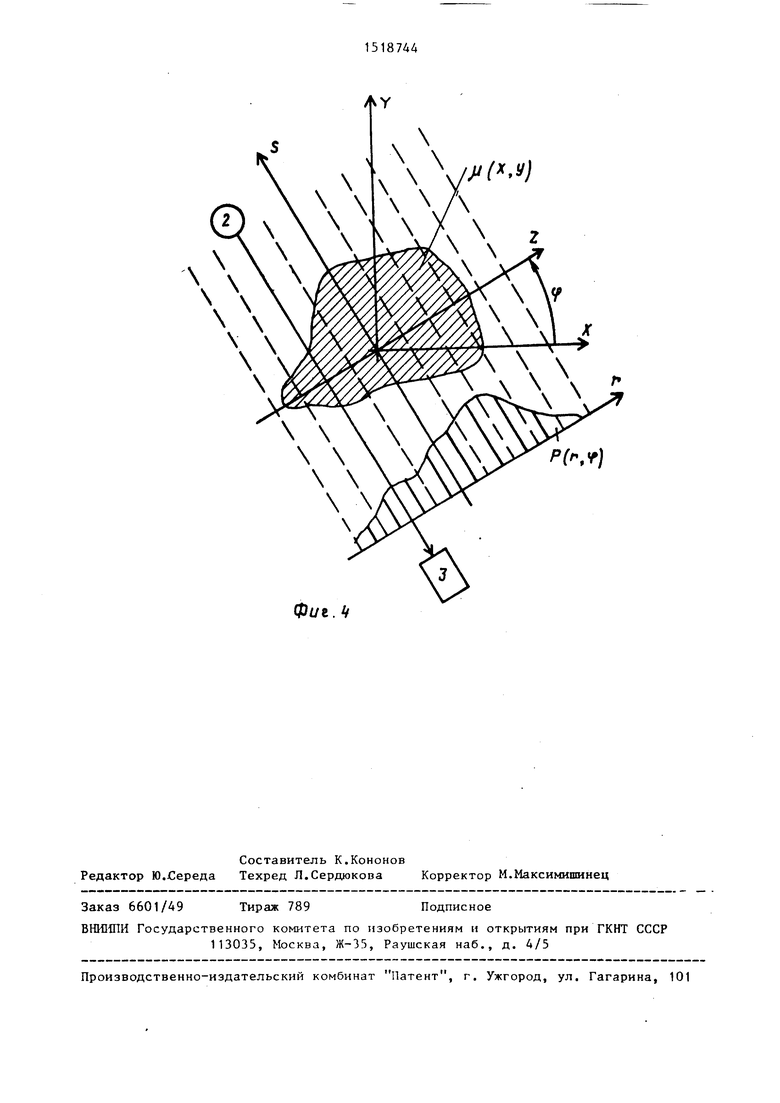
Па фиг.1 приве; ена функциональная схема предлагаемого вычислительного томографа; на фиг.2 - функциональная схема блока задания зоны локального сканирования; на фиг.З - схема блока задаш я зоны локального скани- ропания во взаимосвязи с блоком датчиков прострарственных координат и средствами для приведения источника излучения и блока детекторов в движение относительно держателя исследуемого объекта; на фиг,4 - система координат, используемая при описании работы вычислитель юго томографа.
Вычислительный томограф ( . ; J содержит сканирующую систему 1 , -г,у- жащую средством для приведеш .я источника 2 излучения и блока 3 детекторов в движение относительно держателя (на фиг.1 не показан), блок 4 датчиков пространственных координат, блок 5 предварительной обработки сигналов детекторов, блок 6 дифференцирования второго порядка, пред ставляюицп собой блок проетранстлсн- но-частотной фильтращш, блок 7 обратного проецирования и суммирования фильтрова1П1ых величин, блок 8 памяти изображения и блок 9 локалы1ого зоны сканирования. На фиг.1 также показан исследуемьш: объект 10 Источник 2 излучения и блок 3 детекторов расположены в плоскости контролируемого сечения по разные стороны от объекта 10 контроля. Сканирующая система 1 управляющиьш связями соединена с блоками 2 и 3 и держателем 10 объекта, определяя их относительные положения в процессе скани- рова1П1Я. Выход блока 3 детекторов соединен с первым входом блока 5 предварительной обработки. Выход блока 5 предварительной обработки соединен с входом блока 6 дифференцирования второго порядка, выход которого соединен с первым входом блок а 7 обратного проецирования и суммирования фшпл ропанных величин. Инфор- мащюнный ньгход ска} . системы 1 спяз и с 1Г/.ОДОМ б.г ока 4 датчиков пространстиениых координат.
нькод блока А датчиков пространст- вс -нных координат соединен с входом блока 9 задания зоны локального сканирования, а второй выход - с вторым входом блока 7 обратного проецирования и суммирования фильтрован- HI.IX величин. Первый выход блока 9 задания зоны локального сканироваПИЯ соединен с вторым входом блока
предварительной обработки, а второй выход соединен с управляющим входом сканирующей системы 1. Выход блока 7 обратного проецирования и суммирования фильтрованных величин соединен с входом блока 8 памяти изо- бражерпп1.
Блок 9 падания зоны локального сканирования (фиг.2) состоит из бло-
ка 1 сравнения и блока 12 формирования координат локальной зоны. Выход блока 12 формирования координат локальной зоны связью 13 соединен с первым входом блока 11 сравнения.
Выход блока 9 задания зоны локального сканирования связями 14, 15 и 16 соединен с вторым, третьим входами блока 11 сравнения и входом блока 12 формирования координат. Выходами блока 9 задания зоны локального сканирования являются связи 17 и 18, идущие с первого и второго вьосо- дов блока 11 сравнения.
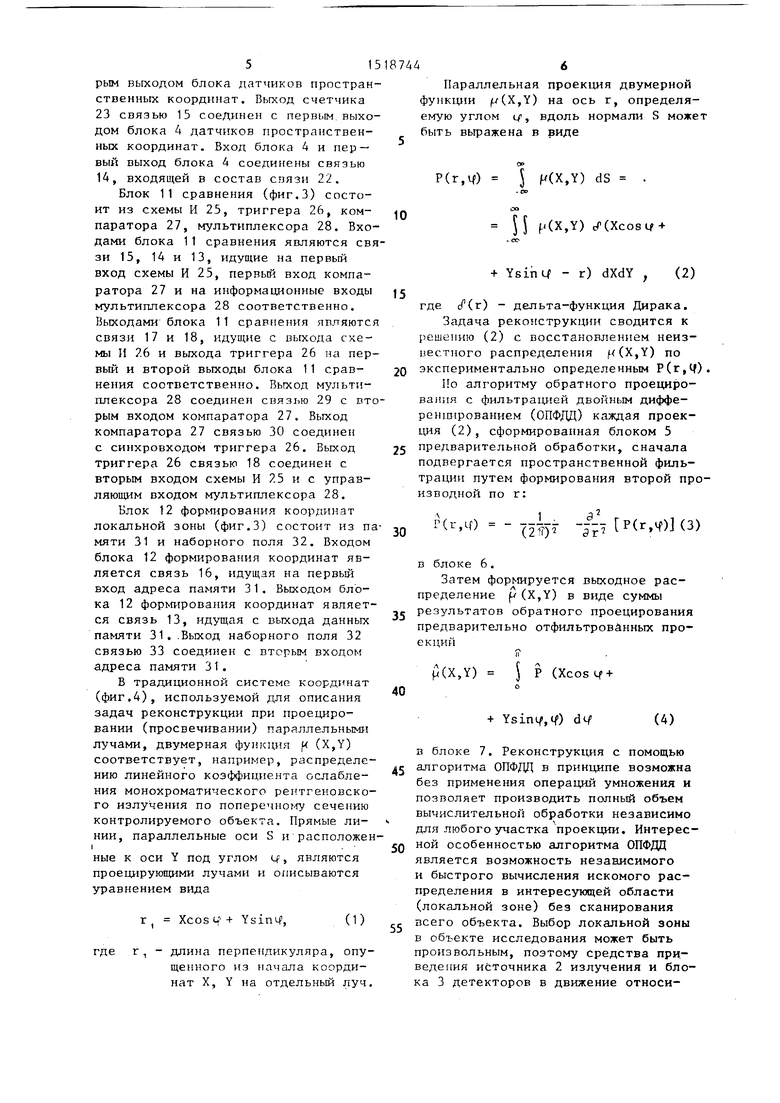
Сканирующая система 1 для приведения источника 2 излучения и блока 3 детекторов в движение относительно держателя (фиг.З) состоит из блока 19 вращения и блока 20 продольного перемещения. Входы блока 19 вращения и блока 20 продольного пере- соединены связью 18 с выходом блока 9 задания зоны локального сканирования. Первые выходы блоков 19 и 20 связями 21 и 22 соответственно соеди ены с блоком 4 датчиков пространственных координат. Второй выход блока 19 вращения соединен с держателем исследуемого объекта 10. Второй выход блока 20 продольного пе- ремеп(ения соединен с источником 2 излучения .
Блок 4 датчиков пространственных координат (фиг.З) состоит из счетчика 23 координат продольного поло- и счетчика 24 угла поворота.
Входами блока 4 являются связи 22 и 21, идущие на входы счетчиков 23 и 24 соответственно. Выход счетчика 24 связью 16 соединен с первым и вто
515
рым выходом блока датчиков пространственных координат. Выход счетчика 23 связью 15 соединен с первым выходом блока 4 датчиков пространственных координат. Вход блока 4 и первый выход блока 4 соединены связью 14, входящей в состав связи 22.
Блок 11 сравнения (фиг.З) состоит из схемы И 25, триггера 26, компаратора 27, мультиплексора 28. Входами блока 11 сравнения являются связи 15, 14 и 13, идущие на первый вход схемы И 25, первый вход компаратора 27 и на информационные входы мультиплексора 28 соответственно. Выходами блока 11 сравнения являются связи 17 и 18, идущие с выхода схемы И 26 и выхода триггера 26 на первый и второй выходы блока 11 сравнения соответственно. Выход мультиплексора 28 соединен связью 29 с вторым входом компаратора 27. Выход компаратора 27 связью 30 соединен с синхровходом триггера 26. Выход триггера 26 связью 18 соединен с вторым входом схемы И 25 и с управляющим входом мультиплексора 28.
Блок 12 формирования координат локальной зоны (фиг.З) состоит из памяти 31 и наборного поля 32. Входом блока 12 формирования координат является связь 16, идущая на первый вход адреса памяти 31. Выходом блока 12 формирования координат является связь 13, идущая с выхода данных памяти 31..Выход наборного поля 32 связью 33 соединен с вторым входом адреса памяти 31.
В традиционной системе координат (фиг.4), используемой для описания задач реконструкции при проецировании (просвечивании) параллельными лучами, двумерная функция р (X,Y) соответствует, например, распределению линейного коэффициента ослабления монохроматического рентгеновского излучения по поперечнот-fy сечению контролируемого объекта. Прямые линии, параллельные оси S и расположен I. ные к оси Y под углом Lf, являются проецирующими лучами и описываются уравнением вида
г Xcos Ч + YsinM ,
(1)
где г, - длина перпендикуляра, опущенного из начала координат X, Y на отдельный луч.
187446
Параллельная проекция двумерной фу)1киии (X,Y) на ось г, определяемую углом Lf, вдоль нормали S може быть выражена в виде
00
P(r,if) S Р(ХД) ds .
- со
10г г
p(X,Y) c/ (Xcosi/-f
+ YsinLf - г) dXdY , (2)
где с/ (г) - дельта-функция Дирака. Задача реконструкции сводится к решению (2) с восстановлением неиз- Бвстного распределения f(X,Y) по
экспериментально определенным Р(г,(|).
По алгоритму обратного проецирования с фильтра1Ц1ей двойным диффе- рснш1рованием (ОПФДЦ) каждая проекция (2), сформированная блоком 5
предварительной обработки, сначала подвергается пространственной фильтрации путем формирования второй производной по г:
30
1 .
Р(г,1|) - -j-- Р(г,Ч)(3)
в блоке 6.
Затем формируется выходное распределение р(X,Y) в виде суммы результатов обратного проецирования предварительно отфильтрованных проекций
p(X,Y) 5 Р (Xcos 4 +
40
+ Ysini,tC) d4
(4)
в блоке 7. Реконструк1Ц1я с помощью алгоритма ОПФДЦ в принципе возможна без применения операций умножения и позволяет производить полный объем вычислительной обработки независимо для любого участка проекции. Интерес- ной особенностью алгоритма ОПФДЦ является возможность независимого и быстрого вычисления искомого распределения в интересующей области (локальной зоне) без сканирования всего объекта. Выбор локальной зоны в объекте исследования может быть произвольным, поэтому средства приведения источника 2 излучения и блока 3 детекторов в движение относительпо держателя исследуемого объекта 10 должно отслеживать текущее положение выбранной локальной зоны в процессе сканирования.
Перед началом сканирования на наборном поле 32 устанавливаются параметры локальной зоны (например, диаметр и координаты центра). В соответствии с углом поворота (начальное положение), приходящим с блока 4 датчиков пространственных координат по связи 16, и информацией с наборного поля 32 память 31 передает по связи 13 координаты начала и конца локальной зоны, В начальном положении триггер 26 находится в сброшенном состоянии и запрещает прохождение позиционных импульсов с блока 4 датчиков пространственных координат по связи 14 на блок 5 предварительной обработки, по которым в ном происходит формирование проекции. Мультиплексор 28 пропускает по связи 29 на вход компаратора 27 координату начала локальной зоны для данного положения по углу исследуемого объекта 10. На второй вход компаратора 27 приходит координата текущег положения источника 2 излучения и блока 3 детекторов, по отношению к иccлeдye ю ry объекту 10, При движении компаратор 27 сравнивает текуще положение источника 2 излучения и блока 3 детекторов по отнощению к иследуемому объекту 10 с информацией приходящей с мультиплексора 28. При совпадении триггер 26 взводится, ра рещая прохождение позиционных импульсов через схему И 25. Триггер 26 работает в счетном режиме. Его взвод переключает мультиплексор 28. Мультиплексор 28 теперь подает на вход компаратора 27 координату конца локальной зоны. Когда координата текущего положения источника 2 излучения и блока 3 детекторов по отношению к исследуемому - объекту 10 будет совпадать с ко- ординатов конца локальной зоны, триггер 26 сбрасывается, запрещая прохождение позиционных импульсов на блок 5 предварительной обработки Сброс триггера 26 сигнализирует о конце локальной зоны. Эта информа
0
5
0
5
0
5
0
ция по связи 18 поступает на сканирующий блок 1 для изменения направления продольного перемещения источника 2 излучения и блока 3 детекторов, а также поворота исследуемого объекта 10. Поворот объекта 10 фиксируется блоком 4 датчиков пространственных координат. Изменяется информация, приходящая на второй вход адреса памяти на мультиплексор 28 по связи 13 поступает координаты начала и конца локальной зоны с учетом другого углового положения. Триггер 26, находясь в сброшенном состоянии, переключает мультиплексор 28, и на вход компаратора 27 подается координата начала локальной зоны, но для следующего углового положения.
Формула изобретения
1.Вычислительный томограф по авт.св. № 972346, отличающийся тем, что, с целью повышения пространственного разрешения
и производительности, а также снижения лучевых нагрузок, дополнительно введен блок задания зоны локального сканирования, причем выход блока датчиков пространственных координат подключен к блоку предварительной обработки сигналов детекторов через указанный блок задания зоны локального сканирования, второй выход которого подключен к средствам для приведения в движение источника излучения и блока детекторов относительно держателя исследуемого объекта.
2.Томограф по П.1, отличающийся тем, что блок задания зоны локального сканирования содержит последовательно соединенные блок формирования координат локальной зоны и блок сравнения, причем вход блока задания зоны локального сканирований является входом блока формирования координат локальной зоны
и вторым и третьим входами блока сравнения, первый и второй выходы которого служат соответствующими выходами блока задания зоны локального сканирования.
Фиъ. 2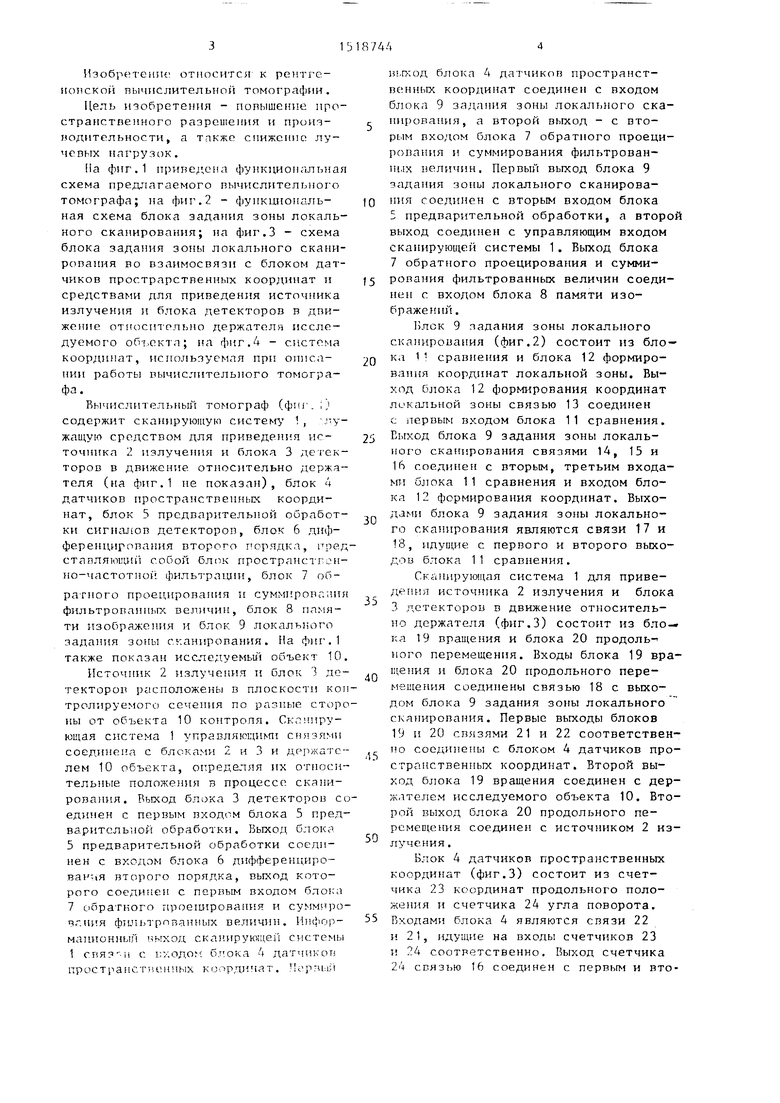
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислительный томограф | 1986 |
|
SU1382168A1 |
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| РЕНТГЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1992 |
|
RU2069854C1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Аналоговое вычислительное томографическое устройство | 1987 |
|
SU1499379A1 |
| Поперечный гамма-томограф | 1980 |
|
SU955905A1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
Изобретение относится к области рентгеновской вычислительной томографии. Цель изобретения - повышение пространственного разрешения и производительности, а также снижение лучевых нагрузок. Для этого в вычислительном томографе, реализующем алгоритм обратного проецирования и фильтрации с двойным дифференцированием, между блоком 4 датчиков пространственных координат и блоком 5 предварительной обработки сигналов с блока 3 детекоторов введен блок 9 задания зоны локального сканирования, работа которого обеспечивает сканирование только в пределах зоны интереса в контролируемом объекте 10. 1 з.п. ф-лы, 4 ил.
Фиг.3
На 10
/
ttaZ
Фиг. if
Составитель К.Кононов Редактор Ю.Середа Техред Л.Сердюкова Корректор М.Максимишинец
Заказ 6601/49
Тираж 789
ВНИИПИ Государственного комитета по изобретениям и открытиям при ТКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
(у
Р(.
Подписное
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
