хранения и с выходом первого инвертора, вход второго синусного преобразователя связан через шестую группу ключей с выходом первой ячейки выборки-хранения и с выходом первого инвертора, выходы первого косинусного и первого синусного преобразователей подключены к входам первого сумматора, а выходы второго косинусного и второго синусного преобразователя - к входам второго сумматора, выходы сумматоров через седьмую группу ключей связаны с входом компаратора, входы регистра старших разрядов связаны с соответствующими выходами селектора квадрантов и с шиной задания угла, подключенной также к входу регистра младших разрядов, управляющие входы синусных и косинусных преобразователей связаны через дополнительно введенный блок управления функциональными преобразователями с соответствующими выходами регистра младших разрядов и выходом управляющего блока.
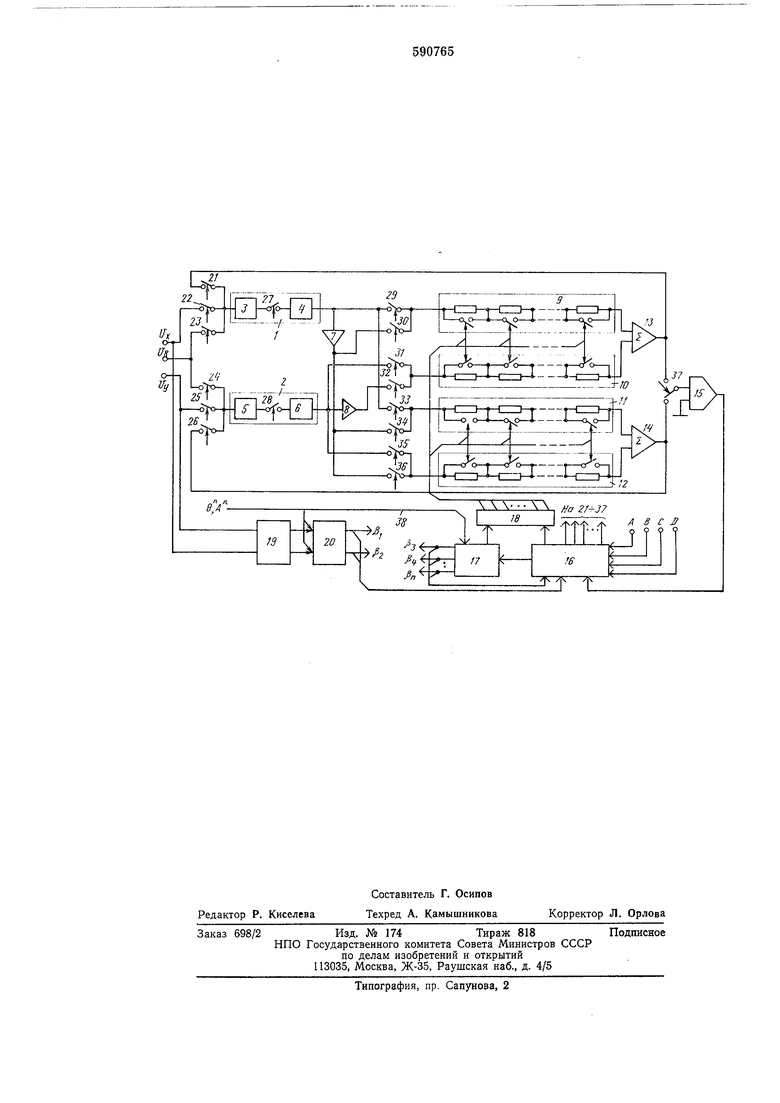
На чертеже представлена структурная схема обратимого преобразователя координат.
Устройство содержит ячейки выборки-хранения 1 и 2, состоящие из схем выборки - хранения 3-6, инверторы 7, 8, функциональные (косинусные и синусные) преобразователи 9-12, сумматоры 13 и 14, компаратор 15, управляющий блок 16, регистр младших разрядов 17, блок управления функциональными преобразователями 18, селектор квадраптов 19, регистр старших разрядов 20, ключи 21-37, шину задания угла 38.
Ячейки выборки-хранения I и 2 служат для запоминания мгновенных значений напряжений, обеспечивая тем самым возможность использования этих напряжений при выполнении вычислений на следующем шаге итерации. При замыкании ключа происходит слежение за входным напряжением, при размыкании - на выходе схемы фиксируется напряжение, действовавшее на ее входе в момент размыкания.
Косинусные и синусные преобразователи 9-12 выполнены в виде цифровых управляемых сопротивлений (ЦУС) и представляют собой цепочку весовых резисторов определенных номиналов, снабженных шунтирующими ключами. В каждом рабочем такте разомкнут какой-либо один ключ, все остальные замкнуты.
Номиналы весовых резисторов в функциональных преобразователях 9 и 12 пропорциональны COS-1 (n/2-i), где f 3, 4,..., л, а в функциональных преобразователях 10 и И - sin- (п/2-), где t 3, 4, . . ., я (п - разрядность двоичного кода).
Взаимодействие всех узлов обратимого преобразователя координат в различных режимах его работы обеспечивается управляющим блоком 16. Последний представляет собой цифровой автомат, закон функционирования которого задается сигналами А, В, С, D,
сигналами на шине задания угла, значениями старших и младших разрядов выходного кода и сигналом компаратора.
Рассмотрим работу обратимого преобразователя координат в различных режимах его функционирования.
Режим А. Преобразование прямоугольных координат в полярные. На аналоговых входах обратимого преобразователя действуют напряжения Uy и Uy, моделирующие координаты X и г/ вектора R. На шинах режима действуют следующие двоичные переменные: , B C,.
Связь полярных координат с прямоугольными выражается соотнощениями
UK-- YUI+UI,
0 rarctg(f/,,
где Un - напряжение, пропорциональное модулю вектора R;
в - аргумент вектора R. В устройстве преобразование координат сводится к тому, что путем реализации уравнений векторного вращения моделируется дискретный поворот по ходу часовой стрелки
вектора R, представленного своими проекциями Их и Uy на эталонные углы я/2-1
(, 4, ..., л) до совпадения с выбранной координатной осью. В процессе поворота производится формирование кодового эквивалента угла в. Модуль вектора представляется пропорциональным напряжением, соответствующим той проекции вектора i которая в конце операции векторного вращения будет отлична от нуля. В первых тактах работы устройства по
знакам проекции Ux и Uy селектор квадрантов 19 определяет значения разрядов pi и ps, которые записываются в регистр 20. В те же моменты путем последовательного замыкания и размыкания сначала ключей 22, 25, а затем
ключей 27, 28 напряжения Ux и Uy фиксируются на выходах ячеек выборки-хранения 1, 2.
В последующих тактах работы производится формирование двоичных разрядов ,
представляющих угол
.х/2,
где m-номер квадранта (т О, 1, 2, 3), в
котором расположен вектор R. С точностью до ногрещности дискретизации 0, р,и/2 + ... +, + ... +Р„ /2«-. (1)
По сигналу с выхода блока 16 ключ 37 подключает вход компаратора 15 либо к выходу сумматора 13 (, 3), либо к выходу сумматора 14 (т 0, 2).
Для нахождения разряда рз, отвечающего весу jt/4, осуществляется первый пробный поворот вектора R на эталонный угол я/4 в отрицательном направлении (по ходу часовой стрелки) в соответствии с уравнениямивекторного вращения Ух.-6 д со8-/4 + /у8Ш1г/4,(2) и у, и у cos 1Г/4 - ll sin /4,(3) где - новые значения координат вектора R после первого поворота. При моделировании соотношения (2) участвуют ключи 29, 31 и блоки 9, 10, 13, при (3) - ключи моделировании соотношения 34, 35 и блоки 11, 12, 14. Компаратор 5 индицирует полярность напряжения на его входе. Если после первого пробного поворота вектора R знак выбранной проекции (Uх и UyJ изменился, то и для отыскания разряда Р4 в формулах (2) и (3)устанавливаютсякоэффициенты cos (jt/8) и sin (я/8), что соответствует пробному повороту на эталонный угол я/8 и т. д. Если после первого пробного поворота знак выбранной проекции не изменился, то и угол я/4 входит в разложение (1). В этом случае новые значения проекции Ux и f/{,, переписываются в ячейки выборки- „J Г-5 nnrnV црго ппо pro няхпжяР нГя ледующ их™рТзрядов осуществляется аналогично. В конце цикла преобразования в регистре 17 будет зафиксирован код, который в сочетании с ранее найденными разрядами Pi и Рг дает кодовый эквивалент угла в. Напряжение, пропорциональное модулю вектора R, в зависимости от номера квадранта и с учетом того, что модуль вектора есть величина положительная, следует снять либо с выхода соответствующей ячейки выборки- хранения, либо с выхода ее инвертора. Режим В. Преобразование полярных координат в прямоугольные. В этом режиме UR О, f/ f/y 0. В 1; . По шине задания угла 38 в регистры 20 и 17 записывается п-разрядный код. 0 Pi + р,и/2+...+Р,/2-Ч-... (4) представляющий аргумент вектора R. Значения прямоугольных координат Ux, Uy вектора R равны проекциям вектора R, повернутого из начального положения, совпадающего с осью J, на угол в в положительном направлении (против хода часовой стрелки). Работа устройства начинается с того, что ячейки выборки-хранения 1, 2 фиксируют на своих выходах напряжение UR. В зависимости от значений старших разрядов РЬ Р2 координаты вектора R после первого поворота находятся по формулам m О (I квадрант) y,.rf//jCOs(), /у.гУд sin (pft ), ш 1 (И квадрант) f/,,z:.(Pftir/2 -I). (). т 2 (III квадрант) t/,.,COS(ftir/2 -I), f/,, (ЗAU/2 -), /и 3 (IV квадрант) f/,(), ,, (8ft7r/2S-i). В этих формулах Рл означает первый старший разряд, отличный от нуля, в ряду рз, р4, - . -, РП. в последующих тактах реализуются алгоритм последовательного поворота вектора R на эталонные углы. После каждого поворота координаты вектора R фиксируются на выходах ячеек выборки-хранения 1, 2. Значения этих координат используются для нахождения новых координат вектора R после очередного поворота. Второй поворот вектора R в положительном направлении обеспечивается соответствующей коммутацией операционных звеньев, Гого™вТаТения ™ У,, и,, cos (p,) - U,j, sin 0,), Uy и,,cos ф,/2-) + f/,. sin (8,), где pr - означает первый единичный разряд в ряду |р4, р5, . . . РП. При последующих поворотах вектора R коммутация операционных звеньев сохраняется, а изменяются только коэффициенты передач соответствующих функциональных преобразователей. Операция преобразования координат заканчивается, когда будут использованы все слагаемые в правой части выражения (4). Значения прямоугольных координат вектора R снимаются с выходов сумматоров 13 и 14. Режим С. Поворот прямоугольной системы координат. В этом режиме , , , а в регистры 17 и 20 записывается поступающий по щине 38 код угла «Л, причем разряд pi определяет знак, т. е. направление новорота. Обозначим через t// и С// новые координаты вектора R в прямоугольной системе координат, повернутый относительно общего неподвижного центра на угол А ±(р./2+...+8,7г/2-+...). Тогда /; СУ, cos А ± и у sin Л,(5) С/; С/уСозЛ + С/,81пЛ.(6) Верхние знаки в правых частях формулы (5) и (6) берутся при (pi 0), нижние - (PI 1). Работа устройства протекает в такой последовательности: сначала напряжения Ux и Uy фиксируются на выходах выбор
ки-хранения 1, 2, после чего блок 16 на основании анализа значений разрядов кода А нроизводит набор соотношений (5), (6), и осуществляет последовательный поворот исходного вектора на те эталонные углы, которые в коде А соответствуют единичные весовые коэффициенты. После каждого поворота вектора / новые значения проекций запоминаются для нспользования их на последующем шаге.
В конце операции искомые значения проекций вектора снимаются с выходов сумматоров 13, 14.
Режим D. KiodupoeuHue угловых положений синусно-косинусных датчиков информации. Ны входы обратимого преобразователя поступают напряжения
UK 0, и и, cos в; и у и, sin О,
где 0 - углы поворота ротора датчика. На шинах задания угла действуют сигналы D,A .
Если напряжения Vx и Uy интерпретировать как координаты некоторого вектора R, то задача кодирования угла @ решается аналогично задаче нахождения аргумента вектора / в режиме А. При этом в регистрах 17 и 20 формируется код угла 8, где .
Предложенный обратимый преобразователь координат является математически точным, его методическая погрешность равна нулю.
Реализация синусных и косинусных преобразователей на цифровых управляемых сопротивлениях, номиналы которых пропорциональны cos (я/2) и sin- () позволяет исключить погрешность аппроксимации, а также упростить эти преобразователи. Поскольку ЦУС обеспечивает формирование выходных сигналов лишь в я-1 точках, блоки синусных и, косинусных преобразователей значительно упрощаются.
Формула изобретения
Обратимый преобразователь координат, содержащий селектор квадрантов, подключенный к входам обратимого преобразователя координат, ключи, первый косинусный и первый синусный преобразователи, первый инвертор и первый сумматор, управляющий блок, входы которого соединены с щинами задания режимов, а выходы - с входами регистра младших разрядов и с управляющими входами ключей, выходы регистров старших и младших разрядов подключены к соответствующим входам управляющего блока, и компаратор, выход которого соединен с соответствующим входом управляющего блока.
отличающийся тем, что, с целью повышения точности, обратимый преобразователь координат дополнительно содержит второй сумматор, второй инвертор, две ячейки выборки-хранения, управляющие входы которых подключены к соответствующим выходам управляющего блока, а таклсе второй косинусный и второй синусный преобразователи, вход первой ячейки выборки-хранения через первую группу ключей связан с входом первой прямоугольной координаты с входом модзля вектора и с выходом первого сумматора, вход второй ячейки выборки-хранения через вторую группу ключей связан со вхоа,ом второй прямоугольной координаты, с входом модуля вектора и с выходом второго сумматора, выход первой ячейки выборки-хранения соединен с входом первого инвертора, выход второй ячейки - с входом второго инвертора, вход первого косинусного преобразователя связан через третью группу ключей с выходом первой ячейки выборки-хранения и с выходом первого инвертора, вход первого синусного преобразователя связан через
четвертую группу ключей с выходом второй
ячейки выборки-хранения и с выходом второго инвертора, вход второго косинусного
преобразователя связан через пятую группу
ключей с выходом второй ячейки выборки-
хранения и с выходом первого инвертора, вход второго синусного преобразователя связан через шестую группу ключей с выходом первой ячейки выборки-хранения и с выходом первого инвертора, выходы первого косинусного и первого синусного преобразователей подключены к входам первого сумматора, а выходы второго косинусного и второго синз-сного преобразователей - к входам второго сумматора, выходы сумматоров через седьмую группу ключей связаны с входом компаратора, входы регистра старших разрядов связаны с соответствующими выходами селектора квадрантов и с шиной задания угла, подключенной также к входу регистра младших разрядов, управляющие входы и косинусных преобразователей связаны через дополпительно введенный блок управления функциональными преобразователями с соответствующими выходами регистра младших разрядов и выходом управляющего блока.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3473011, кл. 235-197, опублик. 1973.
2.Авторское свидетельство СССР № 525971, кл. G 06G 7/22, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
| Обратимый преобразователь координат | 1974 |
|
SU525971A1 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь кода в угол поворота вала | 1987 |
|
SU1425835A1 |
| Преобразователь координат | 1983 |
|
SU1120387A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ МНОГОКАНАЛЬНЫХ ЦВЕТНЫХ ЗАПИСЕЙ | 1973 |
|
SU369595A1 |