(Л
Фиг.
Изобретение относится к животноводству, а конкретно к устройствам управления кормораздачей.
Цель изобретения - повышение точности дозирования кормов. На фиг. 1 изображена схема управления; на фиг. 2 - конструкция датчика трассы.
Датчик трассы состоит из магнито- провода 1 в виде полосы из металла, проложенного вдоль фронта кормления, например вдоль стойла одного животного или группы их, в зависимости от техно логической потребности. К маг- нитопроводу прикреплен сердечник с катушкой 2 возбуждения, получающей питание через переменный резистор 3, устанавливаемый в удобном месте, например на конструкциях станков для содержания животных, и доступный обслуживающему персоналу. Питание на передающие элементы поступает через провода 4 и 5, подключаемые через дополнительные сигнальные жилы гибкого кабеля 6 электроснабжения раздатчика от источника электропередачи трехфазного напряжения А, В, С. На раздатчике жилы 4 и 5 подключены к асинхронному тахогенерато- ру 7, а силовые жилы кабеля 6 подключены к системам 8 и 9 управления электроприводов механизмов перемещения раздатчика 10 и выдачи корма 11 соответственно. Асинхронньй тахо- генератор 7 получает питание переменным напряжением от системы 9 управления. На раздатчике установлен магниточувствительньй элемент, состоящий из катушки 12 с обмоткой и стального сердечника 13. Катушка 12 подключена к системе 9 управления проводами 14 и 15. На фиг. 2 показан один из вариантов исполнения датчика. Магнитопровод 1 из отрезка стальной полосы содержит продольную щель, в которой свободно перемещается сердечник 13 магниточувствительного элемента. На магнитопроводе закреплена катушка 2, стальной сердечник которой представляет собой одно цело с магнитопроводом 1.
Устройство работает следующим образом.
Резисторами 3 обслуживающий персонал заранее, перед кормлением животных, задает величину дозы корма. Напряжение, снимаемое с асинхронного тахогенератора 7, пропорционально скорости движения раздатчика, пос-
0
5
0
5
0
5
0
5
0
5
Кольку тахогенератор кинематически связан с ходовой частью раздатчика. Далее это напряжение через кабель 6 и по проводам 4 и 5 и резисторы 3 подается на катушки 2 датчиков трассы. Эта катушка возбуждают в магни- топроводах 1 электромагнитное поле, величина которого в каждом отдельном магнитопроводе 1 пропорциональна величине напряжения, которое, в свою очередь, пропорционально величине сопротивления резисторов 3, т.е. величине заданной дозы корма в каждой кормушке. Сердечник 13 магниточувствительного элемента перемещается в щели магнитопровода 1 в процессе перемещения раздатчика и выдачи корма. При этом магнитные силы магнитопровода 1 воздействуют на сердечник 13 и наводят в его обмотке 12 переменное напряжение соответствующей величины, передаваемое в систему 9 управления электропривода механизма 11 выдачи корма, задавая скорость его работы и вьщачи определенного количества корма в кормушку, магнито- провод 1 которой проезжает в данный момент раздатчик. дальнейшем двиг жении раздатчика его магниточувст- вительный элемент переходит на следующий Магнитопровод очередной кормушки и система 9 изменяет интенсивность выдачи корма в соответствии с заданием. При изменении скорости движения раздатчика пропорционально изменяется скорость вращения тахогенератора 7, который пропорционально скорости движения раздатчика изменяет напряжение в проводах 4 и 5 и, следовательно, величину воздействия датчика трассы на магниточувствительньй элемент и механизм вьщачи корма.
Предлагаемое устройство управления раздатчиком кормов обладает расширенными функциональными возможностями, надежностью работы и позволяет решать разнообразные задачи технологического процесса.
Формула изобретения
Устройство управления кормораздатчиком, содержащее управляющую трассу с датчиками над каждой из кормушек и кормораздатчик с механизмами перемещения и выдачи корма, отличающееся тем, что, с целью
повышения точности дозирования кормов, датчики выполнены в виде распределенных магнитопроводов, на которых размещены обмотки намагничивания, а кормораздатчик снабжен тахогенера- тором, кинематически связанным с механизмом перемещения и магниточув- ствительным элементом, который подключен к схеме управления механизмом
вьщачи корма, при этом обмотка намагничивания каждого датчика через переменный резистор включена в линию, связанную с тахогенератором кормораздатчика, а магниточувствительный элемент кормораздатчика установлен с возможностью взаимодействия с датчиками, а его обмотка связана со схемой управления механизма выдачи корма.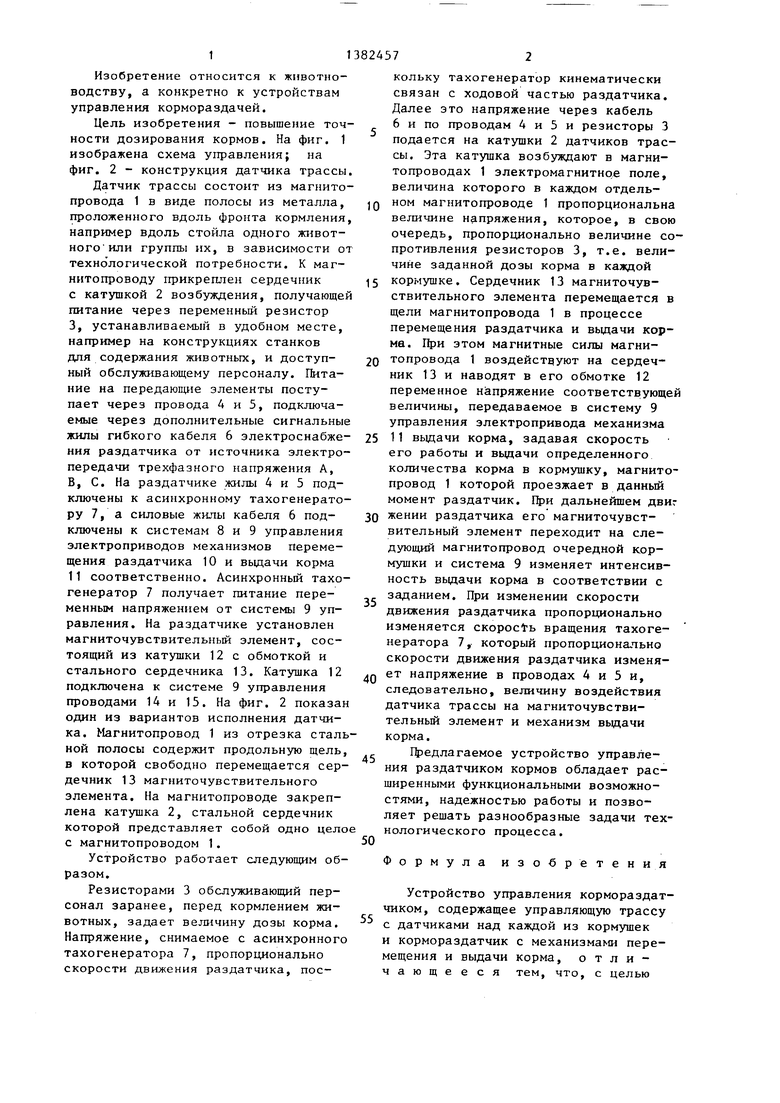
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1990 |
|
SU1752293A1 |
| Кормораздатчик сыпучих кормов | 1986 |
|
SU1382456A1 |
| Устройство управления к кормораздатчику | 1980 |
|
SU865235A1 |
| Раздатчик кормов | 2019 |
|
RU2732323C1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| ВЕСОВОЙ ПОРЦИОННЫЙ РАЗДАТЧИК КОРМОВ | 1999 |
|
RU2165692C2 |
| Кормораздатчик | 1983 |
|
SU1118324A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Способ кормления птицы при ее содержании в клеточных батареях | 1990 |
|
SU1800947A3 |
| Устройство для управления дозатором кормораздатчика | 1986 |
|
SU1355959A1 |
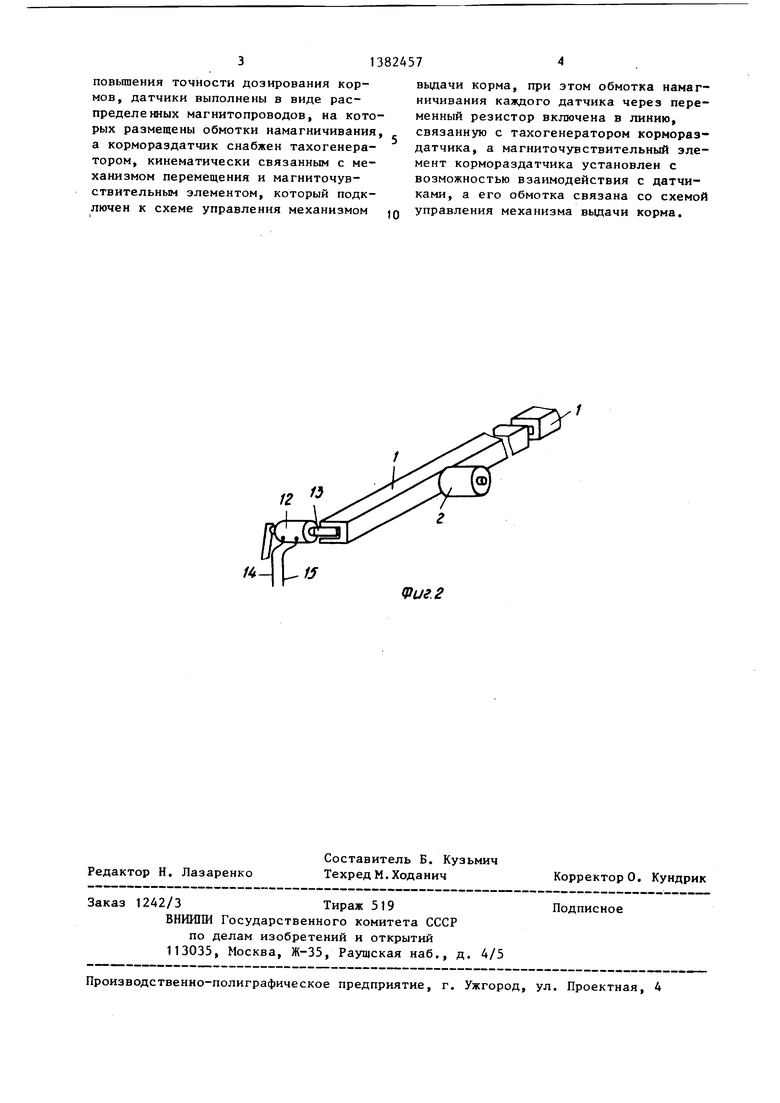
Изобретение относится к животноводству. Цель изобретения - повышение точности дозирования кормов. Датчик трассы выполнен в виде распределенного магнитопровода 1 вдоль зоны кормления с катушкой 2 возбуждения, получающей электропитание через резистор 3 от асинхронного та- хогенератора 7. Последний установлен на раздатчике и кинематически связан с механизмом 10 перемещения раздатчика. Магнитопровод взаимодействует с сердечником 13 магнито- чувствительного элемента, установленным на раздатчике и подключенным к системе 9 управления механизмом 11 вьщачи корма. Блок 9 управления задает скорость перемещения кормораздатчика и управляет вьщачей определенного количества корма в кормушку. 2 ил.
12
1
IS
| Механизм управления к кормораздатчику | 1976 |
|
SU609521A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
