Изобретение относится к животноводству, в частности к кормдению животных. Известен автоматический кормораздатчик с программным управлением, передвигающийся вдоль стойл и содержащий дозатор и программные датчики (задатчики ) для регулирования количества корма, подаваемого в,каждое стойло СЗОднако известньпЧ кормораздатчик содержит емкость, которую необходимо периодически заполнять, возвращая платформу к загрузочному механизму, что ограничивает возможность автоматизации кормораздачи на больших фермах. Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является кормораздатчи содержащий подвижную платформу и установленный на ней транспортер с основным и дополнительным интегрирующими пpивoдa я, включаюцими каждый по двигателю, усилителю и тахогенератору,два элемента сравнения выходы которых соединены со входами усилителей соответствующих интегрируювдх приводов, причем первый вход первого элемента сравнения соединен через делитель с тахогенератором ос новного интегрирующего привода, а входы второго элемента сравнения связаны соответственно с выходом первого элемента сравнения и выходом тахогенератора дополнительного интегрирующего привода i. Недостатком известногокорморазда чика является отсутствие возможности индивидуального дозирования корMOB. Цепь изобретения - обеспечение индивидуального дозирования кормов при раздаче. Указанная цель достигается тем, что кормораздатчик снабжен коммутатором, датчиком положения платформы и задатчиками индивидуальных Доз корма, при этом последние через ком мутатор связаны со вторым входом пе вого элемента сравнения, а управляю щий вход коммутатора подключен к датчику положения платфор. На чертеже схематически представ лен кормораздатчик. Кормораздатчик содержит подвижную платформу J, на которой установ лен транспортер 2, механически соединенный .через вал 3 и редуктор 4 с интегрирующим приводом, включающим двигатель 5, усилитель 6 и тахогенератор 7 обратной связи. Кормораздатчик содержит также дополнительный интегрирующий привод, состоящий из двигателя 8, усилителя 9 и тахогенератора 10 обратной связи. Дв1у атели 5 и 8 через механический диффер-енциал 11 соединены с валом 12 платформь 1. Задагчики 13-113-i подключаются пос11 ёдством коммутатора 18, соединенного с датчиком положения платформы 17 к входу первого элемента сравнения 14, |к другому входу которого через делирель 15 подключен тахогенератор 7. Выход первого элемента 14 сравнения соединен с усилителем 6 и входом второго элемента 16 сравнения, выход которого соединен с усилителем 9. К другому входу элемента 16 сравнения подключен тахогенератор 10. Кормораздатчик работает следующим образом. Задатчиками 13-1 - 13-i устанавливается требуемая индивидуальная доза корма, а следовательно, и ско- . рость кормораздатчика при прохождении соответствующего скотоместа. После подачи напряжения питания интегрирующий привод, включающий усилитель 6, двигатель 5 и тахогенератор 7 обратной связи, управляет скоростью транспортера 2 в соответствии с положешем задатчика 13-1 первого по фронту кормления животного. Сигнал с выхода усилителя 6 подается на вход дополнительного интегрирующего привода, включаощего усилитель 9, двигат.ель 8, тахогенератор 10 и управляющего скоростью перемещения подвижной платформы 1 по валу 12. Кроме того, подвижной платформе 1 движение передается через механический дифференциал 11. При этом к скорости вала 12, которая определяется редукцией между выходными осями двигателей 5 и 8, устанавливаемой при помощи делителя 15, добавляется скорость по величине, равная ошибке первого привода. После прохождения первого скотоместа коммутатор 18, управляемый сигналом датчика положения платформы 17, подключает к входу первого элемента сравнения 14 задатчик второго животного 13-2. В результате
3111832.44
изменяется скорость транспортера,ными раздатчиками, обеспечивает инследовательно, и выдаваемая -дозадивидуальное кормление животйых,
корма. После прохождения второго ско-что позволяет наиболее полно удовтоместа подключается задатчик треть-летворить индивидуальные их особен
его животного и далее процесс-пов- jности, а следовательно, ролучить
торяется аналогично описанному.прирост продуктивности при одноПредпоженный кормораздатчик, по временном снижении расхода корсравнению с известными платформен-мов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1979 |
|
SU829060A1 |
| Круглое помещение для содержания животных | 1990 |
|
SU1792272A3 |
| Коровник | 1980 |
|
SU1082352A1 |
| Устройство автоматизированного контроля системы приготовления и раздачи концентрированных кормов в процессе кормления животных | 1990 |
|
SU1782498A1 |
| Устройство для раздачи корма | 1990 |
|
SU1692435A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| Устройство для раздачи корма | 1988 |
|
SU1546028A1 |
| УСТАНОВКА ДЛЯ КОНВЕЙЕРНОГО ОБСЛУЖИВАНИЯ ЖИВОТНЫХ | 1992 |
|
RU2029464C1 |
| Способ управления дозирующим механизмом и устройство для его осуществления | 1989 |
|
SU1762826A1 |
| Устройство для управления кормораздатчиком клеточной батареи | 1980 |
|
SU897185A1 |
КОРМОРАЗДАТЧИК,содержащий подвижную ппатформу и установленный на ней транспортер с основным и дополнительным интегрирующими приводами, включающими каждый по двигателю, усилителю и тахогенератору, два элемента сравнения, выходы которых соединены с входами усилителей соответствующих интегрирующих приводов, причем первый вход первого элвнмента сравнения соединен через делитель с тахогенератором основного интегрирующего привода, а входы второго элемента сравнения связаны соответственно с выходом первого элемента сравнения и выходом тахогенератора дополнительного интегрирующего привода,о т л и ч а ющ и и с я тем, ЧТО, с целью обеспечения индивидуального дозирования кормов при раздаче,кормораздатчик снабжен коммутатором, датчиком положения платформы и задатчикамн индивидуальных доз корма, при этом V) последние через коммутатор связаны С с вторым входом первого элемента сравнения, а управляющий вход коммутатора подключен к датчику положеSi ния . пл атформы.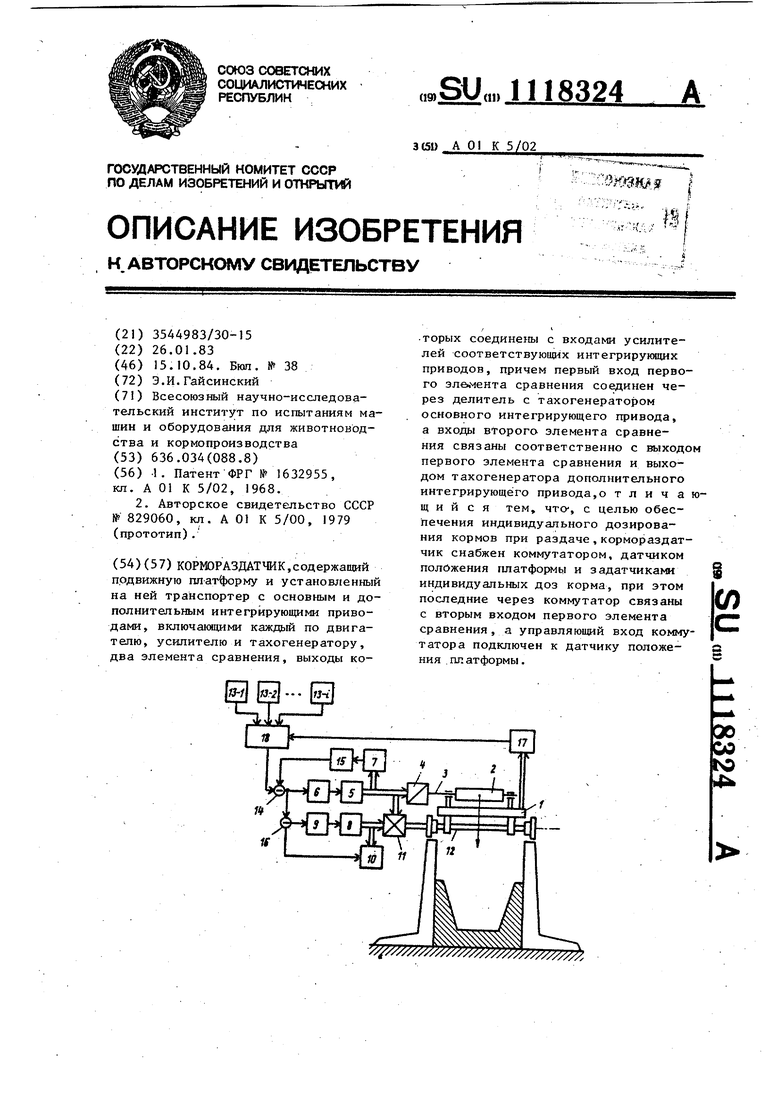
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стекло для светофильтров | 1989 |
|
SU1632955A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кормораздатчик | 1979 |
|
SU829060A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
