1
(Л
со
00 00
00
Изобретение относится к машино - строению, в частности к электрогид- равл:ическим приводам, и может, быть использовано в качестве управляющего устройства технологического и друго - го оборудования
Цель изобретения - упрощение кон- стрз К11ИН и повьЕпение надежности.
На чертеже представлена схема привода
Пьезогидравлический шаговый приво содержит цилиндр 1 с крых жами . и 3, разделитель, выполненньй в виде двух взаимно подвижных пормней 4 и 5, в ка2ф;ом из которых выполнены каналы соответственно 6 и 7 с размес енными в них управляемыми клапанами 8 и 9. Поршни 4 и 5 установлены в цилиндре
30132
напряжение к клапану 8. Напряжение подводят такой полярности, что в результате обратного пьезоэффекта клапан 8 открывается. Камеры 10 и 11 цилиндра 1 сообщаются между собой. Клапан 9 при этом остается закрытым и запирает камеру 12. Теперь электрическое напряжение подводится к пакету
JQ 18 генератора механических деформаций. При этом напряжение подводится такой полярности, что в результате обратного пьезоэффекта кольца 19 пакета 18 удлиняются (ув еличиваются по
15 толщине) и, отталкиваясь от порщня 5 с помощью бурта 16, двигают шток 15 вверх на один шаг, Порщень 5 при этом остается неподвижным ввиду того, что он опирается на гидравлическую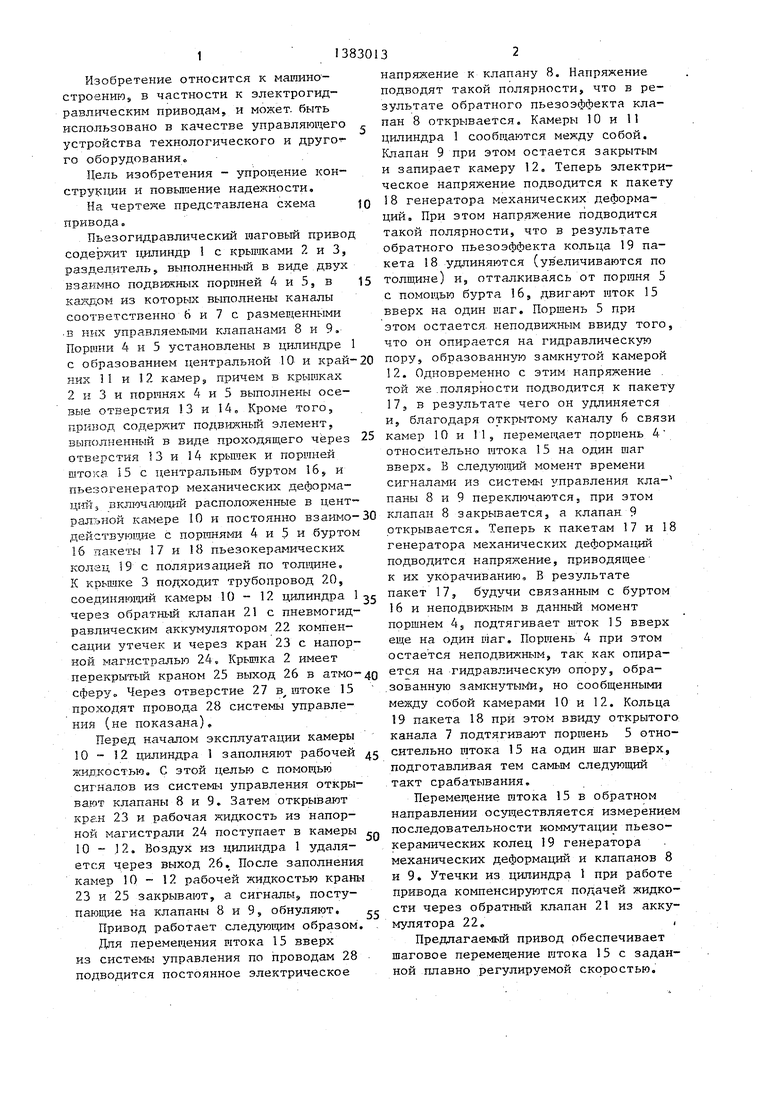
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод | 1983 |
|
SU1116232A1 |
| Пьезогидравлический шаговый привод | 1984 |
|
SU1213264A1 |
| Самотормозящее зажимное устройство | 1986 |
|
SU1392251A1 |
| СПОСОБ ЗАРЯДКИ ГИДРОАККУМУЛЯТОРА СИСТЕМЫ ПРИВОДА ТРЁХКЛАПАННОГО ГАЗОРАСПРЕДЕЛИТЕЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ПЬЕЗОНАСОСОМ | 2015 |
|
RU2576732C1 |
| Устройство для проходки скважин в грунте продавливанием | 1978 |
|
SU785433A1 |
| СПОСОБ ЗАРЯДКИ ГИДРОАККУМУЛЯТОРА СИСТЕМЫ ПРИВОДА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ПЬЕЗОНАСОСОМ | 2015 |
|
RU2576722C1 |
| Пьезогидравлический насос | 1984 |
|
SU1222904A1 |
| Силовой цилиндр | 1986 |
|
SU1498988A1 |
| Электрогидравлический привод | 1986 |
|
SU1353958A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU368083A1 |
Изобретение м.б. использовано в качестве управляющего устройства технологического оборудования. Цель изобретения - упрощение конструкции i и повышение надежности привода. При- вод содержит, подвижный элемент, выполненный в виде проходящего через отверстия 13 и 14 крышек и поршней . штока 15 с центральным буртом 16. Каждый из пакетов 17 и 18 установлен между буртом 16 и поршнем. Такая конструкция привода обеспечивает перемещение штока 15 с заданной плавно регулируемой скоростью. Пьезогенера- тор образован только двумя пакетами 17 и 18. Неидентичность параметров пакетов 17 и 18 не приводит к потере работоспособности привода. 1 ил.
с образованием центральной 10 и край-20 пору, образованную замкнутой камерой них 11 и 12 камер, причем в крышках 12. Одновременно с этим напряжение .
той же .полярности подводится к пакету 17э в результате чего он удлиняется
и, благодаря открытому каналу 6 связи 25 камер 10 и 11, перемегцает поршень 4 относительно штока 15 на один шаг вверх В следующий момент времени сигналами из системы управления кла- паны 8 и 9 переключаются, при этом
2 и 3 и поршнях 4 и 5 выполнены осевые отверстия 13 и 14. Кроме того, привод содержит подвижный элемент, выполненный в виде проходящего через отверстия 13 и 14 крьтшек и поршней штоки- 15 с центральным буртом 16, и пьезогенератор механических деформа- ц. -Шз включающий расположенные в центральной камере 10 и постоянно взаимо-30 клапан 8 закрывается, а клапан 9 действуюш,ие с поршнями 4 и 5 и буртом открывается. Теперь к пакетам 17 и 18 16 пакеты 17 и 18 пьезокерамических генератора механических деформаций колец 19 с поляризацией по толщине, подводится напряжение, приводящее К крьшже 3 подходит трубопровод 20, к их укорачиванию, В результате соединяющий камеры 10 - 12 цилиндра 135 пакет 17, будучи связанным с буртом через обратный клапан 21 с пневмогид- 6 и неподвижным в данный момент равлическим аккумулятором 22 компен- поршнем 4, подтягивает шток 15 вверх сации утечек и через кран 23 с напор- еще на один шаг. Порщень 4 при этом ной магистралью 24, Крышка 2 имеет остается неподвижным, так как опира- перекрытый краном 25 выход 26 в атмо-40 я на гидравлическую опору, обра- сферу. Через отверстие 27 в штоке 15 .зованнзпо замкнутыми, но сообщенными проходят провода 28 системы управления (не показана).
Перед началом эксплуатации камеры 10 - 12 цилиндра 1 заполняют рабочей 45 сительно рдтока 15 на один шаг вверх, жидкостью, С этой целью с помощью подготавливая тем самым следующий сигналов из системы управления открывают клапаны В и 9, Затем открывают кргн 23 и рабочая жидкость из напорной магистрали 24 поступает в камеры г, 10 - ,12. Воздух из цилиндра 1 удаляется через выход 26, После заполнения камер 10 12 рабочей жидкостью краны 23 и 25 закрывают, а сигналы посту55
между собой камерами 10 и 12. Кольца 19 пакета 18 при этом ввиду открытого канала 7 подтягивают поршень 5 отнопавзщие на клапаны 8 и 9, обнуляют. Привод работает следую1чим образом, Для перемещения Р1тока 15 вверх из системы управления по проводам 28 подводится постоянное электрическое
такт срабатывания.
Перемещение штока 15 в обратном направлении осуществляется измерением последовательности коммутации пьезокерамических колец 19 генератора механических деформаций и клапанов 8 и 9, Утечки из цилиндра 1 при работе привода компенсируются подачей жидкости через обратньш клапан 21 из аккумулятора 22,(
Предлагаемый привод обеспечивает шаговое перемещение штока 15 с заданной плавно регулируемой скоростью.
и, благодаря открытому каналу 6 связи камер 10 и 11, перемегцает поршень 4 относительно штока 15 на один шаг вверх В следующий момент времени сигналами из системы управления кла- паны 8 и 9 переключаются, при этом
клапан 8 закрывается, а клапан 9 открывается. Теперь к пакетам 17 и 18 генератора механических деформаций подводится напряжение, приводящее к их укорачиванию, В результате пакет 17, будучи связанным с буртом 6 и неподвижным в данный момент поршнем 4, подтягивает шток 15 вверх еще на один шаг. Порщень 4 при этом остается неподвижным, так как опира- я на гидравлическую опору, обра- зованнзпо замкнутыми, но сообщенными
клапан 8 закрывается, а клапан 9 открывается. Теперь к пакетам 17 и 18 генератора механических деформаций подводится напряжение, приводящее к их укорачиванию, В результате пакет 17, будучи связанным с буртом 6 и неподвижным в данный момент поршнем 4, подтягивает шток 15 вверх еще на один шаг. Порщень 4 при этом остается неподвижным, так как опира- я на гидравлическую опору, обра- зованнзпо замкнутыми, но сообщенными
сительно рдтока 15 на один шаг вверх, подготавливая тем самым следующий
между собой камерами 10 и 12. Кольца 19 пакета 18 при этом ввиду открытого канала 7 подтягивают поршень 5 относительно рдтока 15 на один шаг вверх, подготавливая тем самым следующий
такт срабатывания.
Перемещение штока 15 в обратном направлении осуществляется измерением последовательности коммутации пьезокерамических колец 19 генератора механических деформаций и клапанов 8 и 9, Утечки из цилиндра 1 при работе привода компенсируются подачей жидкости через обратньш клапан 21 из аккумулятора 22,(
Предлагаемый привод обеспечивает шаговое перемещение штока 15 с заданной плавно регулируемой скоростью.
Дискретность позиционирования привода может плавно регулироваться в процесс се движения штока 15 путем изменения величины подводимого к пьезокерами- ческим кольцам 19 пакетов 17 и 18 электрического напряжения. Это позволяет использовать привод в адаптивных системах управления. Конструкция привода проста и технологична. Пьезо- генератор механических деформаций привода образован только двумя пакетами 17 и 18. При этом неидентичность параметров пакетов 17 и 18 не приво- дит к потере приводом работоспособности, а лишь влияет на равенство . шагов привода.
/
Формула, и зобретения Пьезогидравлический шаговьй привод, содержащий цилиндр с крышками,
разделитель и подвижный элемент, установленные в цилиндре с образованием центральной и крайних камер, пьезогенератор механических деформаций, включаюш 1й расположенные в центральной камере два пакета пьезокера- мических колец и yпpaвляe Ф.Ie клапаны, причем разделитель выполнен в виде
Q двух взаимно подвижных поршней, в каждом из которых выполнены каналы с размещенными в них управляемыми клапанами, отличающийся тем, что, с целью упрощения конструк5 ции-и повьшения надежности, крышки и поршни выполнены с осевыми отверстиями, а подвижный элемент - в виде проходящего через отверстия крышек и порвшей штока с центральным буртом,
0 при этом каждый из пакетов установлен между буртом и порешен.
| Пьезогидравлический позиционер | 1985 |
|
SU1295045A1 |
