ив
Lr- jF-rSJ
f
1ч9
СП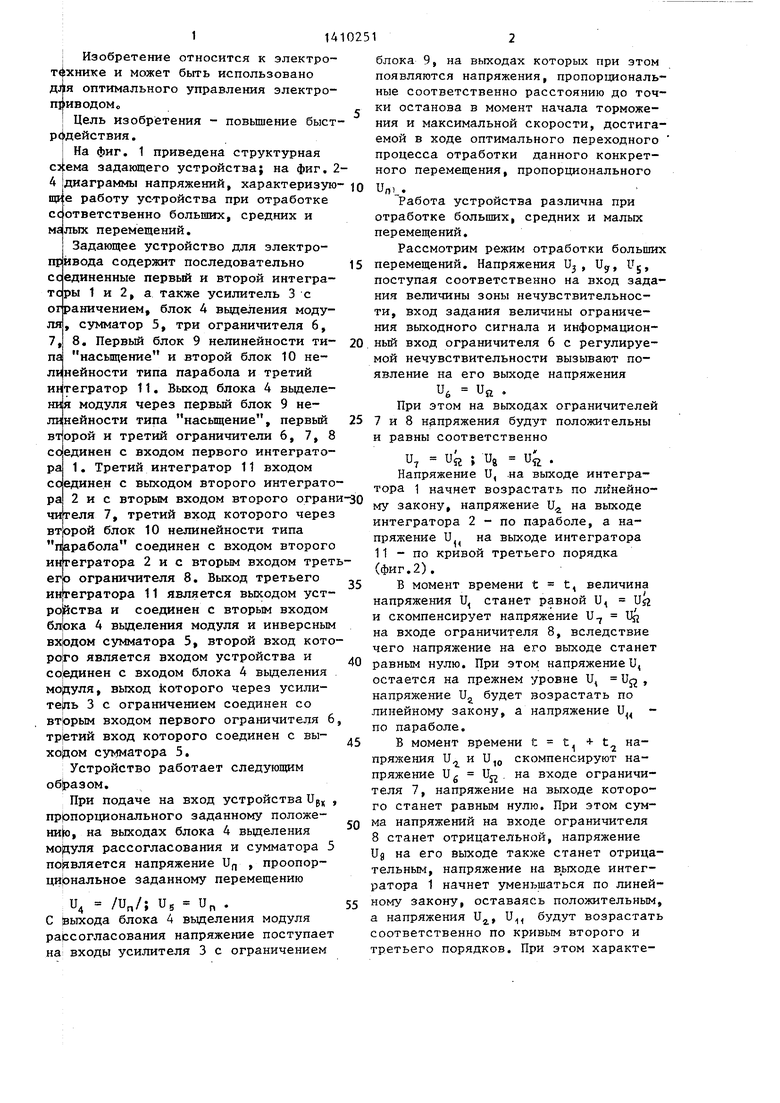
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Нелинейный фильтр для систем автоматического управления | 1982 |
|
SU1027697A2 |
| Задающее устройство системы тиристорного управления электроприводом постоянного тока | 1987 |
|
SU1417143A2 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Синхронно-синфазный электромагнитный вибропривод | 1980 |
|
SU964885A1 |
| Устройство для управления электродвигателем переменного тока | 1985 |
|
SU1312713A1 |
| Устройство для моделированияиМпульСНОгО дАТчиКА чАСТОТы ВРАщЕНия | 1979 |
|
SU849245A1 |
| Преобразователь частоты в напряжение | 1983 |
|
SU1117834A1 |
Изобретение относится к электротехнике и м.б. использовано для оптимального управления электроприводом. Цель изобретения - повьшение быстродействия. При подаче на вход устройства напряжения, пропорционального заданному положению, на выходах блока 4 выделения модуля рассогласовакия и сумматора 5 появляется напряжение, пропорциональное заданному перемещению. С выхода блока 4 напряжение поступает на входы усилителя 3 с ограничением и блока 9 нелинейности типа насьщение, на выходах которых при этом появляются напряжения, пропорциональные соответственно расстоянию до точки останова в момент начала торможения максимальной скорости, достигаемой в ходе оптимального переходного процесса отработки данного конкретного перемещения. Работа устройства различна при отработке больших, средних и малых перемещений. Устройство обеспечивает формирование оптимальных по быстродействию законов изменения сигнала заданного положения и его первой, второй и третьей производных - заданной скорости, ускорения и рывка при отработке перехода в заданное положение. 4 ил. SS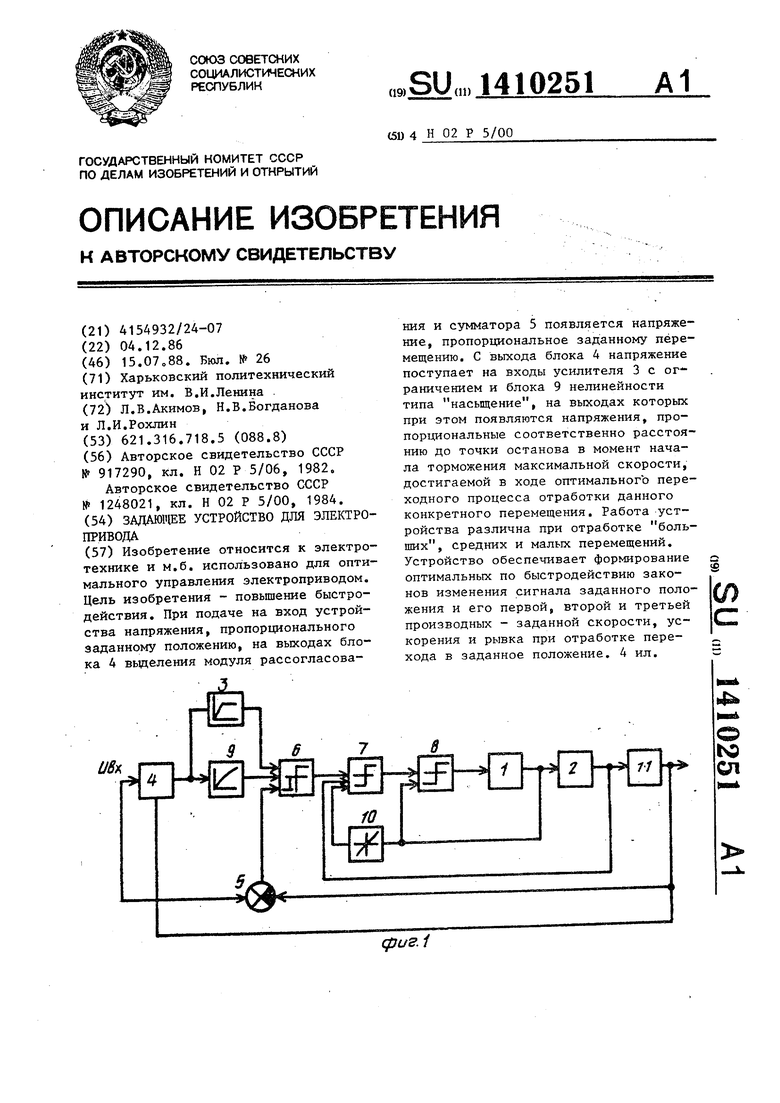
-
тК
фиг.1
114
Изобретение относится к электротехнике и может быть использовано для оптимального управления электроприводом
Цель изобретения - повышение быст р содействия.
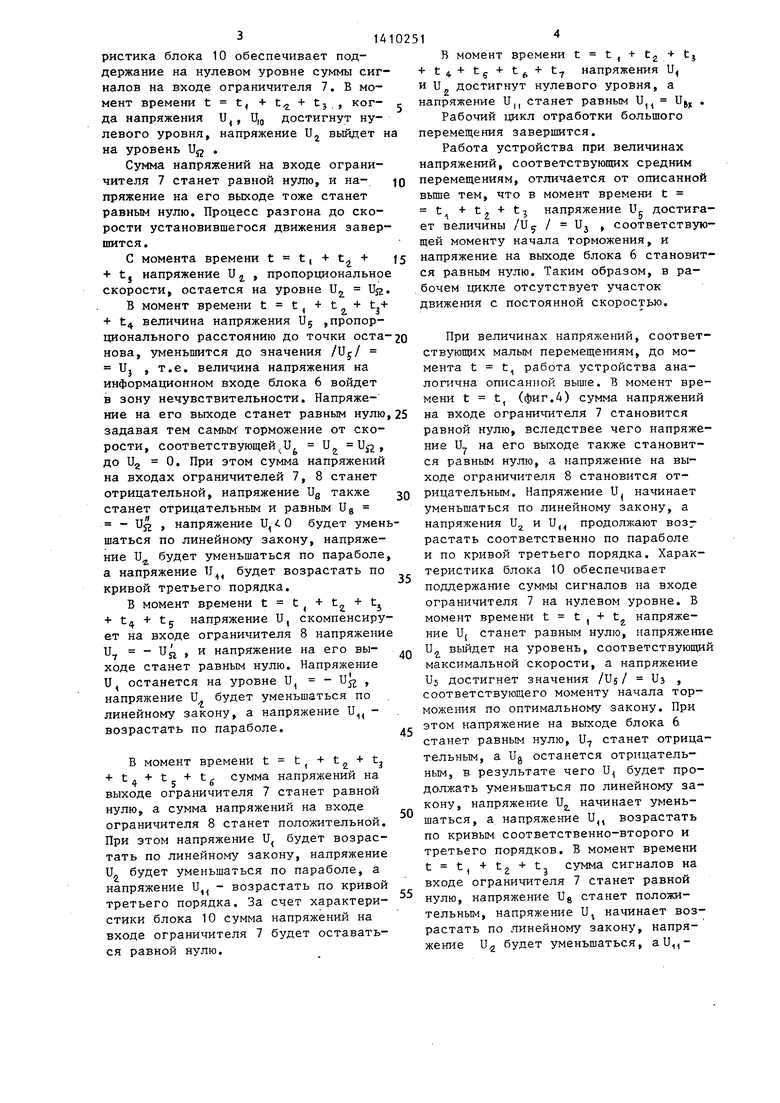
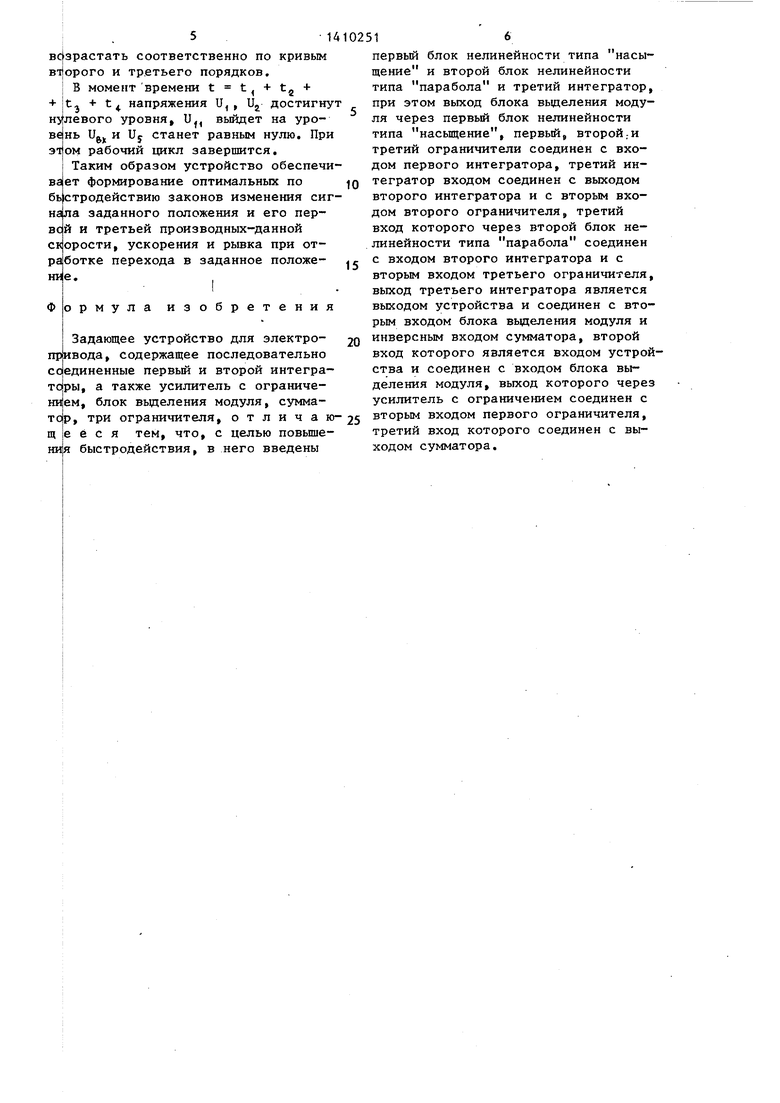
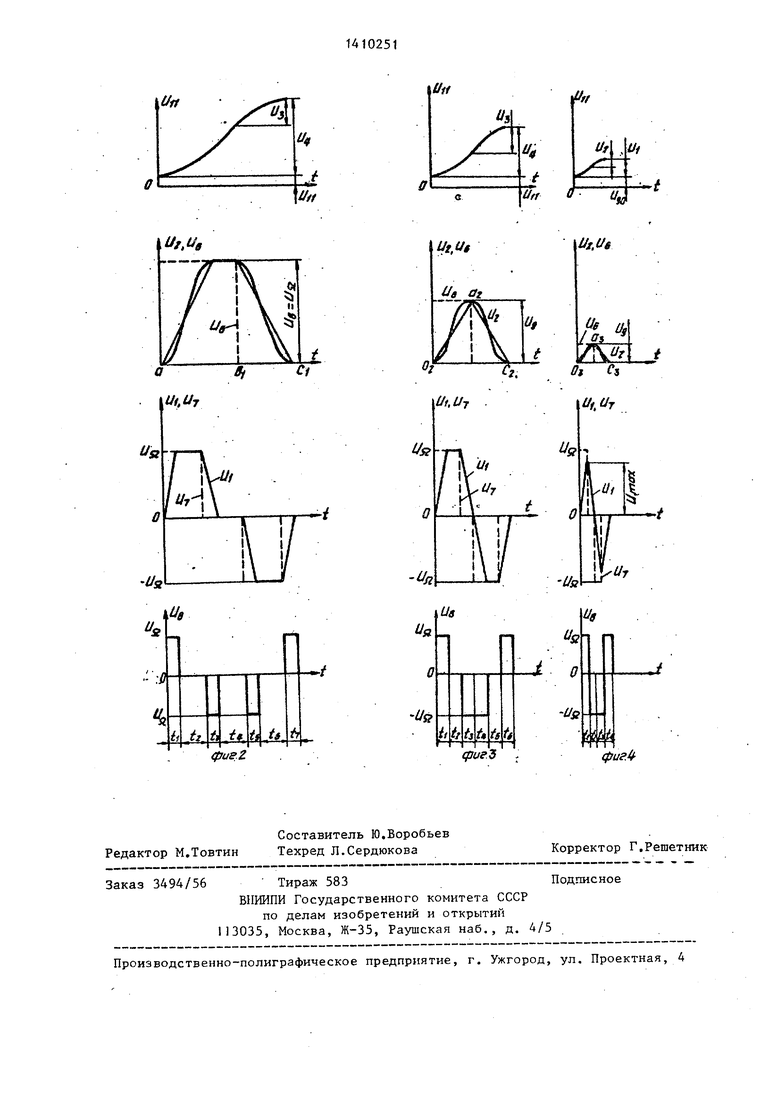
На фиг. 1 приведена структурная сз|:ема задающего устройства; на фиг. 2 4 диаграммы напряжений, характеризую щие работу устройства при отработке соответственно больших, средних и малых перемещений.
Задающее устройство для электро- пр1ивода содержит последовательно соединенные первый и второй интеграторы 1 и 2, а также усилитель 3 с ограничением, блок 4 вьщеления модуля, сумматор 5, три ограничителя 6, 7, 8. Первый блок 9 нелинейности ти
nd насыщение и второй блок 10 нелинейности типа парабола и третий интегратор 11. Выход блока 4 выделе- Hi модуля через первый блок 9 нености типа насыщение, первый второй и третий ограничители 6, 7, 8 соединен с входом первого интегратора 1 . Третий интегратор 11 входом соединен с выходом второго интегратора 2 и с вторым входом второго огран чителя 7, третий вход которого через второй блок 10 нелинейности типа парабола соединен с входом второго интегратора 2 и с вторым входом третего ограничителя 8. Выход третьего интегратора 11 является выходом устройства и соединен с вторым входом бл ока 4 выделения модуля и инверсным вх|одом сумматора 5, второй вход кото pojro является входом устройства и сочинен с входом блока 4 вьщеления мо|дуля, выход koToporo через усили- те|пь 3 с ограничением соединен со вторым входом первого ограничителя 6 третий вход которого соединен с вы- сумматора 5,
Устройство работает следующим об|разом.
При подаче на вход устройства Ug , пропорционального заданному положе- ни|ю, на выходах блока 4 вьщеления мойуля рассогласования и сумматора 5 появляется напряжение Uf, , проопор- циЬнальное заданному перемещению
и /и„/; UB и .
С |выхода блока 4 вьщеления модуля рассогласования напряжение поступает на входы усилителя 3 с ограничением
Q
блока 9, на выходах которых при этом появляются напряжения, пропорциональные соответственно расстоянию до точки останова в момент начала торможения и максимальной скорости, достигаемой в ходе оптимального переходного процесса отработки данного конкретного перемещения, пропорционального
UOL.
Работа устройства различна при отработке больших, средних и малых перемещений.
Рассмотрим режим отработки больших
5 перемещений. Напряжения Uj, U, Uc, поступая соответственно на вход задания величины зоны нечувствительности, вход задания величины ограничения выходного сигнала и информацион0 ный вход ограничителя 6 с регулируемой нечувствительности вызывают появление на его выходе напряжения
б UK . При этом на вькодах ограничителей
7и В напряжения будут положительны и равны соответственно
и, Uft ; Ug Uft .
Напряжение U, .на выходе интегратора 1 начнет возрастать по ли нейно- му закону, напряжение U на выходе интегратора 2 - по параболе, а напряжение и на выходе интегратора 11 - по кривой третьего порядка (фиг.2).
В момент времени t t, величина
I
напряжения U, станет равной U Ujj и скомпенсирует напряжение U 1 на входе ограничителя 8, вследствие чего напряжение на его выходе станет равным нулю. При этом напряжение U, остается на прежнем уровне U, Uj напряжение U будет возрастать по линейному закону, а напряжение U - по параболе.
В момент времени t t, + t напряжения U и и,о скомпенсируют напряжение Ug Uj2 . на входе ограничителя 7, напряжение на выходе которого станет равным нулю. При этом сумма напряжений на входе ограничителя
8станет отрицательной, напряжение
Ug на его выходе также станет отрицательным, напряжение на вьгходе интегратора 1 начнет уменьшаться по линейному закону, оставаясь положительным а напряжения U, U будут возрастат соответственно по кривым второго и третьего порядков. При этом характеристика блока 10 обеспечивает поддержание на нулевом уровне суммы сигналов на входе ограничителя 7. В мо
+ t + t,
КОГмент времени t ,., . i. -} . да напряжения U,, Цд достигнут нулевого уровня, напряжение U выйдет н на уровень Ujj .
Сумма напряжений на входе ограничителя 7 станет равной нулю, и на- пряжение на его выходе тоже станет равным нулю. Процесс разгона до скорости установившегося движения завершится .
С момента времени t t, + t + + tj напряжение Uj , пропорциональное скорости, остается на уровне Uj USE.
В момент времени t t, -ь
t величина напряжения Uj ,пропорционального расстоянию до точки останова, уменьшится до значения /Uj/ Uj , т.е. величина напряжения на информационном входе блока 6 войдет в зону нечувствительности. Напряжение на его выходе станет равным нулю, задавая тем самым торможение от скорости, соответствующей .и U Ujj , до и 0. При этом сумма напряжений на входах ограничителей 7, 8 станет отрицательной, напряжение Ug также станет отрицательным и равным Ug - Ujj , напряжение U, i О будет уменьшаться по линейному закону, напряжение V будет уменьшаться по параболе.
35
напряжение U, будет возрастать по ивой третьего порядка.
В момент времени t t + t + tj t + tj напряжение U, скомпенсиру- момент времени на входе ограничителя 8 напряжение - Ui , и напряжение на его вымени t t, (фи на входе ограни равной нулю, вс ние U-, на его в ся равным нулю, ходе ограничите рицательным. На уменьшаться по напряжения U. и растать соответ и по кривой тре теристика блока поддержание сум ограничителя 7
sг
де станет равным нулю.
Напряжение
40
останется на уровне U - , пряжение U будет уменьшаться по нейному закону, а напряжение U, - зрастать по параболе.
45
ние и, станет р и выйдет на ур максимальной ск Uj достигнет зн соответствующег можения по опти этом напряжение станет равным н тельным, а Ug о ным, в результа должать уменьша кону, напряжени шаться, а напря по кривым соотв третьего порядк , входе ограничит нулю, напряжени тельным, напряж растать по лине
+ t
В момент времени , +
4сумма напряжении на
5 -6 выходе ограничителя 7 станет равной
нулю, а сумма напряжений на входе ограничителя 8 станет положительной. При этом напряжение U будет возрастать по линейному закону, напряжение и,, будет уменьшаться по параболе, а напряжение U, - возрастать по кривой третьего порядка. За счет характеристики блока 10 сумма напряжений на входе ограничителя 7 будет оставаться равной нулю.
В момент времени + t + tj + t + t и и
t t , + t.
I -2
напряжения
а
IQ|5
2025JQ
35
момент времени t,
и,
.- достигнут нулевого уровня, а напряжение U,, станет равным U U .
Рабочий цикл отработки большого перемещения завершится.
Работа устройства при величинах напряжений, соответствующих средним перемещениям, отличается от описанной вьш1е тем, что в момент времени t t напряжение Ug достигает величины /Uj- / Uj , соответствующей моменту начала торможения, и напряжение на выходе блока 6 становится равным нулю. Таким образом, в рабочем цикле отсутствует участок движения с постоянной скоростью.
При величинах напряжений, соответствующих малым перемещениям, до момента t t лоп-1чна
мени t t, (фиг.4) сумма напряжений на входе ограничителя 7 становится равной нулю, вследствее чего напряжение U-, на его выходе также становится равным нулю, а напряжение на выходе ограничителя В становится отрицательным. Напряжение U начинает уменьшаться по линейному закону, а напряжения U. и U, продолжают возрастать соответственно по параболе и по кривой третьего порядка. Характеристика блока 10 обеспечивает поддержание суммы сигналов на входе ограничителя 7 на нулевом уровне. В
, работа устройства ана- описанной выше. В момент времомент времени
t
t, +
напряже0
5
0
5
ние и, станет равным нулю, напряжение и выйдет на уровень, соответствующий максимальной скорости, а напряжение Uj достигнет значения /Us/ Uj , соответствующего моменту начала торможения по оптимальному закону. При этом напряжение на выходе блока 6 станет равным нулю, U станет отрицательным, а Ug останется отрицательным, в результате чего U будет продолжать уменьшаться по линейному закону, напряжение U начинает уменьшаться, а напряжение U,, возрастать по кривым соответственно-второго и третьего порядков. В момент времени ,, сумма сигналов на входе ограничителя 7 станет равной нулю, напряжение Ug станет положительным, напряжение U начинает возрастать по линейному закону, напряжение и будет уменьшаться.
аи,,возрастать соответственно по кривым BTJoporo и третьего порядков. I В момент времени t t + tg + tj + t напряжения U,, Uj достигнут нулевого уровня U, выйдет на уровень и и Uj станет равным нулю. При этом рабочий цикл завершится.
Таким образом устройство обеспечи- ва|ет формирование оптимальных по бьстродействию законов изменения сигнала заданного положения и его первой и третьей производных-данной скорости, ускорения и рьшка при отработке перехода в заданное положе- кие.
Ф
ормула изобретения
Задающее устройство для электро- щй1вода, содержащее последовательно соединенные первый и второй интеграторы, а также усилитель с ограничением, блок вьщеления модуля, сумматор, три ограничителя, отличаю- щ е ё с я тем, что, с целью повыше- ни|я быстродействия, в него введены
первый блок нелинейности типа насыщение и второй блок нелинейности типа парабола и третий интегратор, при этом выход блока выделения модуля через первый блок нелинейности типа насьщение, первый, второй;и третий ограничители соединен с входом первого интегратора, третий интегратор входом соединен с выходом второго интегратора и с вторым входом второго ограничителя к третий вход которого через второй блок нелинейности типа парабола соединен с входом второго интегратора и с вторым входом третьего ограничителя, выход третьего интегратора является выходом устройства и соединен с вторым входом блока вьщеления модуля и инверсным входом сумматора, второй вход которого является входом устройства и соединен с входом блока выделения модуля, выход которого через усилитель с ограничением соединен с вторым входом первого ограничителя, третий вход которого соединен с выходом сумматора.
| Задающее устройство системы управления электроприводом | 1980 |
|
SU917290A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задающее устройство для электропривода | 1984 |
|
SU1248021A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
