Изобретение относится к судостроению, а именно к способам стабилизации заякоренных плавучих установок, используемых для различных целей, например для бурения в море.
Целью изобретения является повышение точности определения горизонтального смещения заякоренной плавучей установки при ее стабилизации.
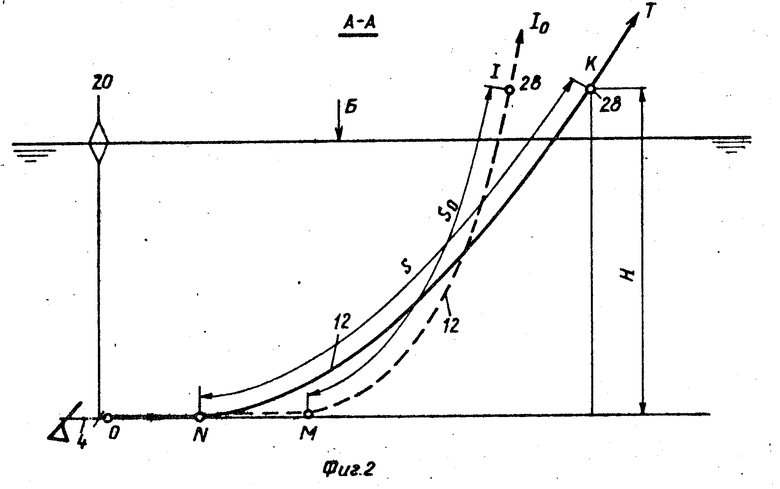
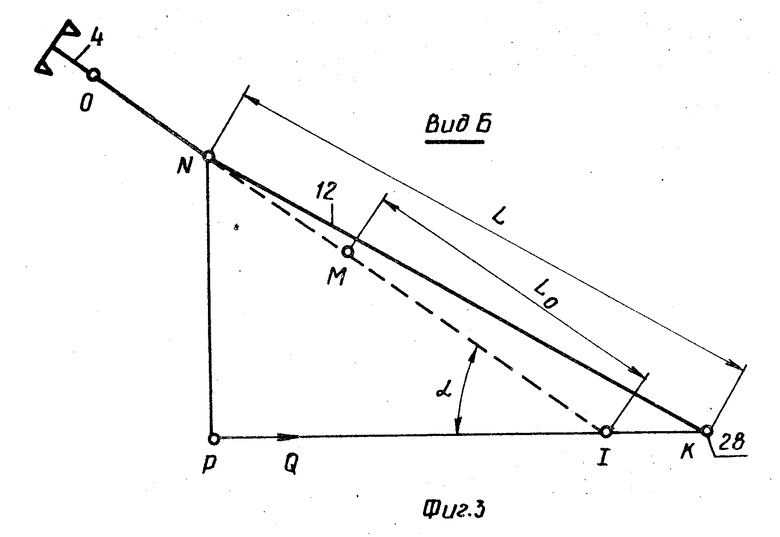
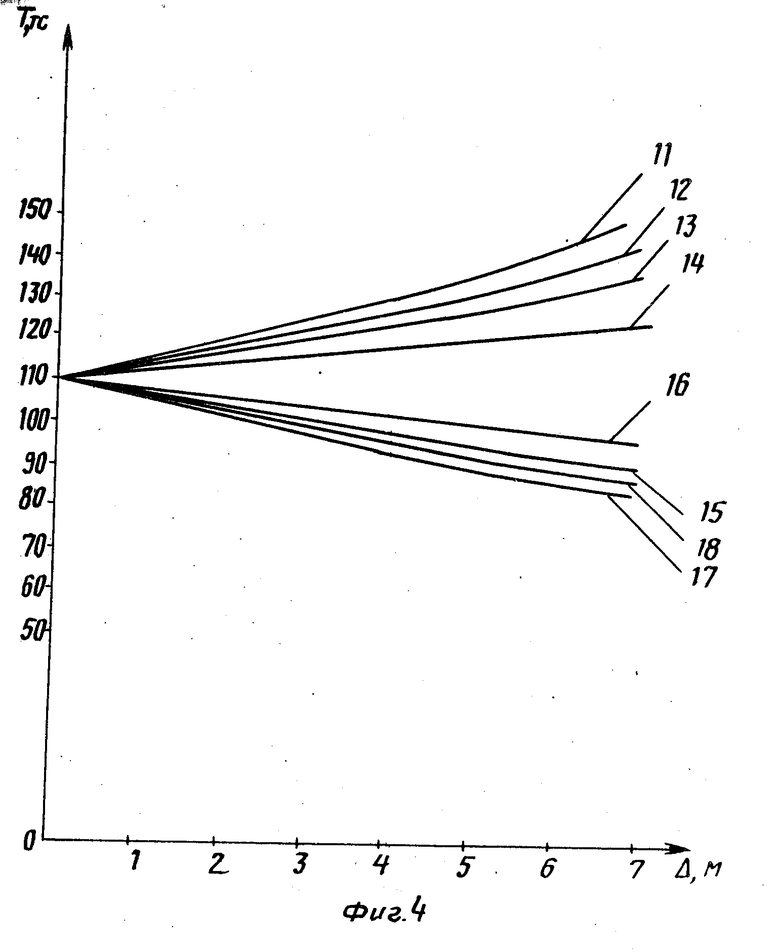
На фиг.1 схематически изображено устройство для осуществления предлагаемого способа (вид сверху установки в рабочем положении); на фиг.2 одна из цепей в сечении А-А на фиг.1 в начальном положении (штриховая линия) и при действии внешней силы (сплошная линия); на фиг.3 вид Б на фиг.2; на фиг.4 жесткостные характеристики цепей, построенные от предварительного натяжения.
Для стабилизации плавучей установки 1 над скважиной 2 имеются якоря 3-10 с якорными цепями 11-18. Места прокладки якорей 3-10 отмечены буями 19-26. Якорные цепи 11-18 проходят через блок-звездочки (клюзовые точки) 27-34 на барабаны грузоподъемных устройств 35-38, например брашпилей. Имеются также датчики 39-46 измерения усилий в цепях 11-18. Направление действия внешней силы, например Q, определяется датчиком 47. Имеется устройство для промера глубин. Обозначение кривых на жесткостных характеристиках (фиг.4) соответствует обозначениям цепей 11-18. На фиг.2, 3 и в формулах приняты следующие обозначения:
Δ горизонтальное смещение установки 1, равное смещению клюзовой точки, например, 28;
I положение клюзовой точки 28, когда кривизна провисания цепи 12 соответствует предварительному натяжению То;
К положение клюзовой точки 28 при смещении Δ под воздействием внешней силы Q;
М положение точки касания цепи 12 с грунтом в состоянии, когда кривизна провисания цепи 12 соответствует предварительному натяжению То;
N положение точки касания цепи 12 с грунтом при смещении Δ
О положение якоря 4;
Н возвышение клюзовой точки 28 над точкой касания цепи 12 с грунтом;
g масса одного погонного метра цепи 12 в воде;
So, Lo, Ao длина провисающей части цепи 12, ее горизонтальная проекция и цепной параметр при предварительном натяжении То;
Т усилие в цепи 12 при смещении Δ под воздействием внешней силы Q;
S, L, A длина провисающей части цепи 12, ее горизонтальная проекция и цепной параметр при смещении Δ под действием внешней силы Q;
α угол между якорной связью 12 и направлением действия внешней силы Q.
При этом
B A0·arch +
+  -
-
C A·arch
Способ стабилизации заякоренной плавучей установки реализуется следующим образом.
В отсутствие воздействия внешних сил Q якорные цепи 11-18 обтягивают, одновременно нагружая одинаковыми порциями усилий по две якорные цепи, линии которых направлены по курсовым углам, отличающимся на 180о, например, например, в таком порядке:
цепь 11 и цепь 18,
цепь 12 и цепь 17,
цепь 13 и цепь 16,
цепь 14 и цепь 15.
При этом длина выбираемой цепи у каждой из пар цепей может быть разная, в зависимости от кривизны провисания цепи. Нагружение пары цепей, например, 11 и 18 одинаковыми порциями позволяет без смещения установки 1 относительно скважины 2 выявить подвижку якоря, например 3, если при выборке цепи 11 усилие в ней падает. В этом случае при выборке цепи 11 потравливают цепь 18 для поддержания в цепях одинакового усилия до зацепления якоря 3 с грунтом. После чего опять одновременно нагружают следующей порцией усилия цепей 11 и 18. Все эти операции повторяют до тех пор, пока усилия в цепях 11-18 не достигнут проектной величины, которой в этом случае будут соответствовать кривые провисания якорных цепей 11-18. Далее промеряют глубины в месте установки якорей 3-10, отмеченных буями 19-26, и на основании этих данных по жесткостным характеристикам определяют смещение установки. Жесткостной характеристикой при позиционировании именуется зависимость смещения заякореннго плавучего объекта от усилия в цепи, полученная нагружением вертикально провисающей цепи (горизонтальная составляющая усилия в этом случае отсутствует) горизонтальной внешней силой определенного направления и замером смещения плавучего объекта при этом. Для того, чтобы жесткостные характеристики всех цепей 1-18 многоякорной системы заякорения установки 1 могли быть использованы для определения ее смещения, когда параметры провисания цепных линий 11-18 разные и воздействие внешних сил Q возможно с любого направления, их цепным линиям придают кривизну и доведением кривизны провисания цепных линий всех цепей 11-18 до соответствующей предварительно заданной величины нагрузки добиваются приведенная жесткостных характеристик всех цепей 11-18 к общей точке, в которой они пересекаются.
После чего для любого направления внешней силы Q определяют изменение усилия в каждой цепи 11-18 в зависимости от смещения установки 1 с учетом параметров каждой цепной линии 11-18, определяемых особенностями ее заложения, глубины и длины вытравленной части (см.фиг.4).
Смещение Δ определяется так
Δ IK KP IP
Зависимость для наветренной 12 и подветренной 17 цепей имеет вид
Δ ± B·cosα ±  причем верхние знаки относятся к наветренной цепи 12, нижние к подветренной цепи 17.
причем верхние знаки относятся к наветренной цепи 12, нижние к подветренной цепи 17.
Аналогичные зависимости для любых других цепей 11-18, жесткостные характеристики которых показаны на фиг.4.
При воздействии на установку 1 внешней силы Q произойдет перераспределение усилий в якорных цепях 11-18. Так, смещение установки 1 в направлении действия внешней силы вызовет увеличение усилий в цепях 11-14 и уменьшение в цепях 15-18. Для измерения смещения установки 1 определяют направление воздействия внешней силы Q по датчику 47. По датчикам 39-46 определяют усилия в цепях 11-18, откладывают их на жесткостной характеристике, соответствующей направлению действия внешней силы Q, и определяют горизонтальное смещение установки 1, по величине которого принимают решение о дальнейших действиях по стабилизации установки.
Способ позволяет по датчикам усилия, а также направлениям действия внешних сил, в отсутствие других средств контроля или при выходе их из строя измерить фактическую величину смещения установки с учетом рельефа дна и состояния грунта в местах прокладки якорей, а также различной длины якорных цепей. Попарная обтяжка цепей небольшими порциями нагрузки приводит к ее горизонтальному смещению относительно скважины, в том числе и при подвижке якорей, поскольку к установке прикладываются противоположно направленные и равные по величине усилия, которые могут создать только вращающий момент.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| БУРОВОЕ СУДНО | 1995 |
|
RU2136535C1 |
| СПОСОБ ШВАРТОВКИ ПЛАВУЧЕГО НАЛИВНОГО СУДНА И СИСТЕМА ДЛЯ ШВАРТОВКИ ПЛАВУЧЕГО НАЛИВНОГО СУДНА | 1994 |
|
RU2145289C1 |
| ЯКОРНАЯ СИСТЕМА | 2009 |
|
RU2517634C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК МОДЕЛЕЙ ПЛАВУЧИХ ИНЖЕНЕРНЫХ ОБЪЕКТОВ, ОБОРУДОВАННЫХ ЯКОРНОЙ СИСТЕМОЙ УДЕРЖАНИЯ, И СПОСОБ ИХ ОПРЕДЕЛЕНИЯ | 2012 |
|
RU2509998C2 |
| Макет заякоренной системы | 1983 |
|
SU1106729A1 |
| СПОСОБ БЕЗУДАРНОЙ АВТОМАТИЧЕСКОЙ УСТАНОВКИ ПЛАВУЧИХ ОБЪЕКТОВ НА ЗАДАННОЕ УГЛУБЛЕНИЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2747141C1 |
| ЛЕДОСТОЙКАЯ МОРСКАЯ ПЛАТФОРМА ДЛЯ СЕЙСМИЧЕСКИХ РАЙОНОВ | 1999 |
|
RU2169231C1 |
| МОРСКОЕ ПЛАВУЧЕЕ ОСНОВАНИЕ ДЛЯ ДОБЫЧИ, ХРАНЕНИЯ И ВЫГРУЗКИ, ИСПОЛЬЗУЕМОЕ В ПОКРЫТОЙ ЛЬДОМ И ЧИСТОЙ ВОДЕ (ВАРИАНТЫ) | 2008 |
|
RU2478516C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ ПЛАВУЧИХ ПЛАТФОРМ | 1993 |
|
RU2061620C1 |
Изобретение относится к судостроению и может быть использовано для стабилизации заякоренных плавучих установок. Целью изобретения является повышение точности определения горизонтального смещения установки при ее стабилизации. Для этого якорные цепи (11,12; 13,14; 15,16; 17,18), закрепленные по противоположным бортам установки, размещают с расположением их проекций на горизонтальную плоскость под курсовым углом 180°, а обтягивание этих цепей производят одновременно нагружением их одинаковыми усилиями, при этом определяют вертикальные и горизонтальные координаты местоположения якорей каждой из указанных цепей, затем травлением и выбиранием якорных цепей устанавливают соответствующую проектной величине нагрузки кривизну провисания каждой якорной цепи, а горизонтальное смещение плавучей установки определяют по жесткостным характеристикам этих цепей. 4 ил.
СПОСОБ СТАБИЛИЗАЦИИ ЗАЯКОРЕННОЙ ПЛАВУЧЕЙ УСТАНОВКИ, заключающийся в том, что якорные цепи размещают по противоположным бортам установки, обтягивают их до установленной величины нагрузки, измеряют усилие в каждой якорной цепи и определяют направление действия внешних сил и горизонтальное смещение установки, с учетом которых производят корректировку места положения установки, отличающийся тем, что, с целью повышения точности определения горизонтального смещения заякоренной плавучей установки при ее стабилизации, якорные цепи, закрепленные по противоположным бортам установки, размещают с расположением их проекций на горизонтальную плоскость под курсовым углом 180o, а обтягивание этих цепей производят одновременно нагружением их одинаковыми усилиями, при этом определяют вертикальные и горизонтальные координаты местоположения якорей каждой из указанных цепей, затем травлением и выбиранием якорных цепей устанавливают соответствующую проектной величине нагрузки кривизну провисания каждой якорной цепи, а горизонтальное смещение плавучей установки определяют по жесткостным характеристикам этих цепей.
| Патент США N 3580207, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
