Изобретение «Способ безударной автоматической установки плавучих объектов на заданное углубление и систем для его реализации» относится к области морской техники, а именно к плавучим заякориваемым объектам, устанавливаемым на заданное углубление в районах Мирового океана с различными глубинами.
К плавучим заякориваемым объектам (ПЗО) относятся притопленные буйковые океанографические, гидрометеорологические или гидроакустические станции, якорные мины.
В начале процесса развертывания и установки ПЗО на заданное углубление его буй в сборе с буйрепом и якорем отделяют от носителя - надводного, подводного или авиационного. Далее ПЗО в сборе начинает погружение под водой и развертывание в позиционное положение.
Известны различные способы установки плавучих заякориваемых объектов (ПЗО) в позиционное положение на поверхности моря или на заданном углублении под поверхностью. Океанологи используют лишь 3 способа неавтоматической установки по отмеренной длине якорного каната, описанные в следующих источниках: Руководство по гидрологическим работам в океанах и морях - П.: Гидрометеоиздат, 1977 - с. 486-490, Берто Г.О. Океанографические буи. - Л.: Судостроение, 1979 - с. 189-201 и, возможно, полуавтоматической - Патент РФ №2404081 - способ функционирования и постановки притопленного океанологического буя и устройство для его осуществления. Несмотря на относительную простоту реализации указанных способов, они требуют большого объема предварительной информации о гидрологии места установки и связаны с высокой трудоемкостью и значительным временем работ по проведению установки в плохо предсказуемых погодных условиях.
Способы автоматической установки ПЗО на заданное углубление (Рычков В.М. Якоря и механизмы установки мин на заданное углубление - СПб - СПбВМИ, 2001 - с. 41-46.) были разработаны для нужд военно-морского флота, главным образом, для установки морских якорных мин и минных защитников на заданное углубление. В настоящее время принято различать три основных способа автоматической установки: штерто-грузовой, петлевой и способ автоколебаний.
В качестве прототипа принято устройство, описанное в патенте РФ №2137672 «Способ установки плавучих тел на заданное углубление» патентообладателя ЦНИИ "Гидроприбор", которое включает плавучее тело с якорем, устройство для непрерывного или периодического сматывания буйрепа по команде гидростатического прибора, размещенного на плавучем теле, причем в моменты начала и прекращения сматывания буйрепа гашение возникающих в канате динамических усилий осуществляется путем проскальзывания буйрепа по канавкам роликов роликового устройства до достижения равновесия сил, действующих на канат.
Недостатком этого способа является необходимость осуществления периодических стопорений буйрепа, возникающую при которых динамическую нагрузку предполагается гасить путем проскальзывания буйрепа по роликам, что связано с ненадежностью и неконтролируемостью процесса обеспечения расчетного режима фрикционного проскальзывания, не исключает прекращения процесса сматывания буйрепа и увеличивает время установки, а, следовательно, и снос буя ПЗО на течении.
Техническим результатом предлагаемого способа безударной автоматической установки плавучих объектов на заданное углубление является уменьшение динамической нагрузки на буйреп за счет исключения его промежуточных стопорений, повышение точности и сокращение времени установки ПЗО на заданное углубление.
Предлагаемый способ автоматической установки ПЗО на заданное углубление включает разделение буя и якоря, непрерывную безостановочную выборку буйрепа из места его размещения на буе или в якоре. Начало выборки буйрепа осуществляют по команде гидростатического прибора, размещенного на буе, а в момент прекращения сматывания осуществляют гашение динамических усилий путем проскальзывания буйрепа по канавкам роликов роликового устройства при этом в процессе выборки буйрепа управляют его натяжением с учетом освобождающейся длины буйрепа с устройства сматывания и корректируют натяжение буйрепа с учетом уменьшения отклонения плавучего объекта от заданного углубления.
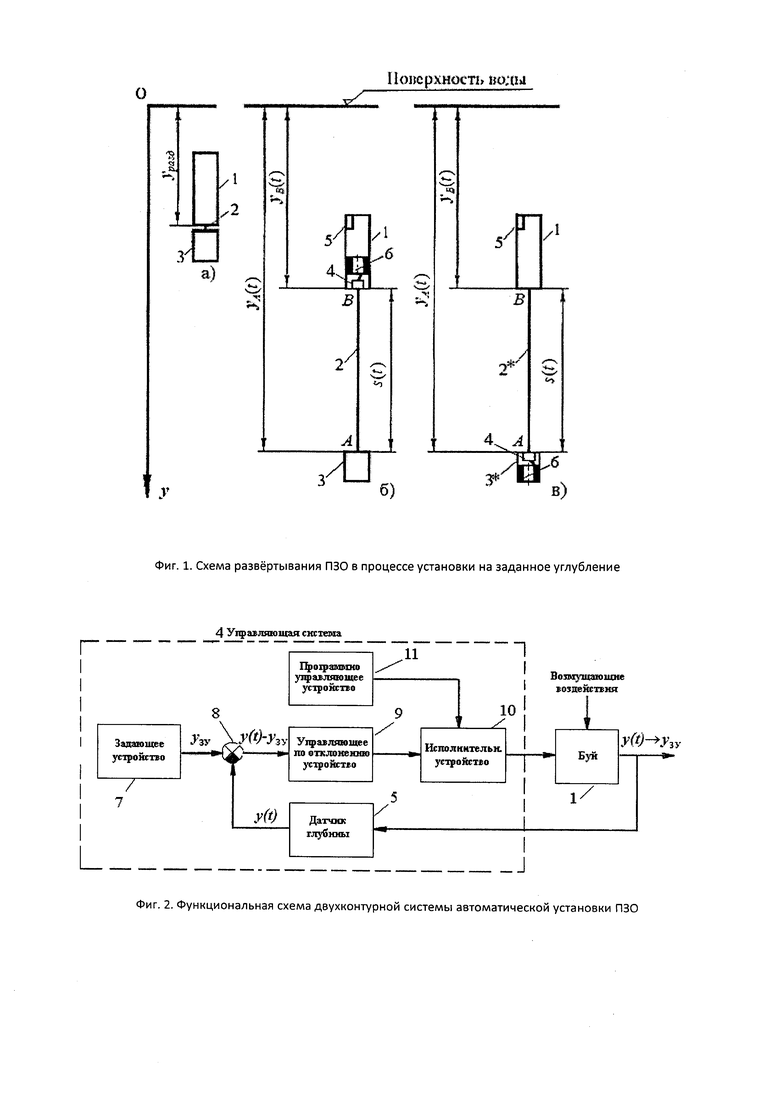
На фигуре 1 представлена кинематическая схема развертывания ПЗО в процессе установки плавучего объекта на заданное углубление, где поз. 1а - разделение буя и якоря на глубине уразд,; 1б- - установка буя с буйрепом и САУ в нем; 1в - установка буя с буйрепом и САУ в якоре. На фигуре 1 обозначены буй 1, буйреп из каната 2, якорь 3, управляющая система 4, датчик забортного давления 5, бухта буйрепа 6. 3* - якорь с буйрепом из грузонесущего кабеля 2*; yA(t), yB(t) - углубления якоря и буя, соответственно, s(t) - длина буйрепа между буем и якорем в момент времени t.
В предлагаемом техническом решении ПЗО - буй в сборе с буйрепом и якорем - после отделения от носителя погружается до верхней границы зоны заданного углубления уразд, где по команде датчика глубины осуществляют отделение буя от якоря (фиг. 1, а) и непрерывную выборку буйрепа, расположенного на буе (фиг. 1б)) или в якоре (фиг. 1в), из бухты. Якорь начинает погружение, а буй, связанный с якорем буйрепом, - удерживаться на линии заданного углубления, при этом обеспечивают управляемое изменение натяжения выбираемого буйрепа с учетом его освобождающейся длины с устройства сматывания и одновременно корректируют изменение натяжения буйрепа пропорционально отклонению буя от заданного углубления элементами системы реализующей предлагаемый способ, что обеспечивает приход и удержание буя на заданном углублении и плавный ход процесса установки без промежуточных стопорений, рывков и проскальзываний.
Для описания работы САУ, установленной на буе ПЗО (Фиг. 1, а, б), рассмотрим уравнения управляемого вертикального движения системы «буй-буйреп якорь»:
где yB, yA, s - ординаты точек В, А буя и якоря и длина буйрепа, выбранного из буя;
υB, υA, t - скорости буя, якоря и текущее время движения, соответственно;
m, q - погонные масса и вес в воде буйрепа;
MAe, MB0e - эффективная масса якоря, равная сумме масс якоря и присоединенной воды, эффективная начальная масса буя, равная сумме начальной массы буя и массе присоединенной воды;
PB0, QA - сила начальной плавучести буя, содержащего буйреп, и вес якоря в воде;

- программное изменение натяжения буйрепа системой автоматической установки буя ПЗО;
KB, KA, Ks - параметры гидросопротивления буя, якоря и погонного гидросопротивления буйрепа при продольном обтекании.
Программное изменение натяжения получено из 4-го уравнения системы (1) при условии  соответствующего идеальному случаю удержанию буя на заданном углублении: yB=yзу,
соответствующего идеальному случаю удержанию буя на заданном углублении: yB=yзу,
где узу, yB - заданное и фактическое углубления буя.
Аналогично предыдущему для ПЗО с САУ, установленной в якоре (Фиг. 1, а, в), рассмотрим уравнения управляемого вертикального движения системы «буй-буйреп якорь»:
где в отличие от (1):
 - натяжение буйрепа в клюзовой точке крепления под буем;
- натяжение буйрепа в клюзовой точке крепления под буем;
МВе, МАе0 - эффективная масса буя и эффективная начальная масса якоря, содержащего буйреп;
PB, QA0 - сила плавучести буя и начальный вес в воде якоря, содержащего буйреп;

- программное изменение натяжения буйрепа в клюзовой точке выхода буйрепа из якоря при развертывании ПЗО, определенное из 4-го уравнения системы (2) при условии  удержания буя на заданном углублении.
удержания буя на заданном углублении.
Таким образом, соотношения (2) и (4) определяют составляющую программного контура управления САУ для случаев размещения буйрепа на буе и в якоре, соответственно.
Затухание колебаний буя в процессе установки на заданное углубление Узу реализуется путем выполнения системы управляющей безударной автоматической установкой плавучих объектов на заданное углубление двухконтурной.
Наиболее близким техническим решением предлагаемой системе является устройство установки плавучих тел на заданное углубление, реализующее способ по патенту №2137672 от 1999 г., которое содержит барабан с канатом, канатосъемник, роликовое устройство, фрикционный регулятор усилия сматывания, гидротормоз, электромагнит.
Недостатком этого решения является то, что при прекращении динамических нагрузок при сматывании каната - стопорений усилие в нем в силу динамики - рывка превышает усилие в канате при сходе с роликового устройства, в результате чего происходит проскальзывание каната по канавкам роликов до тех пор, пока работа сил трения каната о канавки не уравновесит работу инерционных сил плавучего тела, что является не достаточно стабильным процессом и протекает неопределенно длительное время.
Техническим результатом предлагаемой двухконтурной системы автоматической установки (САУ) буя на заданное углубление является уменьшение динамических нагрузок на буйреп, исключение промежуточных стопорений, вызывающих рывки с растягивающими ударами в буйрепе при его выборке, повышение точности и сокращение времени установки плавучего объекта на заданную глубину.
Технический результат достигается выполнением одного из контуров системы автоматической установки (САУ) является разомкнутым - программным, а другой - замкнутым обратной связью, корректирующим изменение натяжения буйрепа пропорционально отклонению буя от заданного углубления.
Разомкнутый программно-силовой контур обеспечивает монотонное изменение натяжения буйрепа, соединяющего буй и якорь, в зависимости от текущей длины выбранного буйрепа по заданной программе. Программное изменение натяжения задается из условия удержания буя на заданном углублении Узу при любой длине S буйрепа между буем и якорем в процессе его выборки системой автоматической установки.
Замкнутый контур обратной связи управления натяжением буйрепа пропорционально отклонению буя от заданного углубления, корректирует как начальное отклонение буя от заданного углубления, так и действие внешних возмущений в процессе установки.
Система безударной автоматической установки плавучих объектов на заданное углубление представлена на:
Фиг. 2 - функциональная схема двухконтурной системы установки ПЗО;
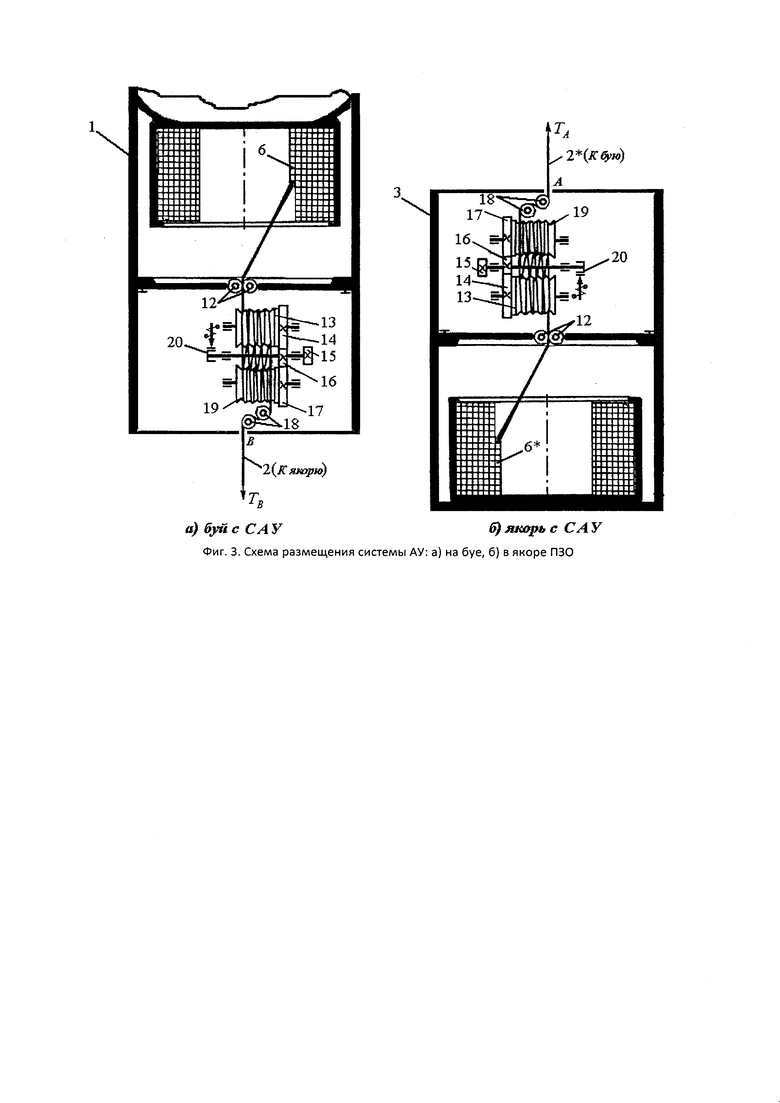
Фиг. 3 - размещение системы на плавучем объекте или в якоре.
На функциональной схеме САУ представлено два основных элемента - объект управления буй 1 и управляющая система 4. Первый разомкнутый контур управляющей системы включает программно-управляющее устройство 11 с выходом на исполнительное устройство 10, и второй контур управления по отклонению, который сформирован последовательно соединенными задающим устройством 7, сравнивающим устройством 8, управляющим по отклонению устройством 9 с выходом на исполнительное устройство 10 и датчиком 5 глубины буя 1 в цепи обратной связи, замкнутым на сравнивающее устройство 8.
На фиг. 3 представлено размещение двух вариантов системы АУ плавучих заякориваемых объектов: фиг. 3а на буе и фиг. 3б в якоре, где А, В - клюзовые отверстия для выхода буйрепа; 6 - бухта буйрепа; 12 - ролики для проведения буйрепа из бухты на исполнительное устройство САУ; 13, 19 - роликовые барабаны для проведения выбираемого из бухты 6 буйрепа; 14 и 17 - зубчатые колеса, связанные с роликовыми барабанами 13 и 19; 15 - крыльчатка гидротормоза; 16 - вал-шестерня, несущая крыльчатку 15 и электрически управляемый фрикционный тормоз 20; 18 - ролики для проведения буйрепа на выход из САУ; ТА, ТВ - натяжения буйрепа на выходе из якоря и буя, соответственно.
Работает предлагаемая двухконтурная управляющая система в ходе процесса установки буя на заданное углубление следующим образом: в процессе выборки буйрепа программно-управляющее устройство 11 этой САУ отслеживает и управляет монотонным изменением натяжения буйрепа в зависимости от длины выбранного буйрепа следующим образом: сигнал, соответствующий текущему значению длины выбранного буйрепа, поступает на исполнительное устройство 10 - его управляемый электрически тормоз. В свою очередь контур обратной связи с исполнительным устройством 10 корректирует натяжение буйрепа из условия уменьшения отклонения буя от заданного углубления, что снижает динамическую составляющую нагрузки на буйреп, поддерживает плавное изменение скорости выборки буйрепа без прекращения процесса выборки и обеспечивает нахождение плавучего объекта в установленной зоне заданного углубления при скорейшем приходе якоря на грунт, сокращая время развертывания ПЗО в позиционное положение, а также устраняет погрешности, обусловленные неучтенными внешними воздействиями.
Кроме того, для уменьшения нагрузки на программную составляющую тормозного устройства, устанавливается гидротормоз, который позволяет реализовать программное изменение натяжения по законам:


где  - среднее значение скорости выборки буйрепа
- среднее значение скорости выборки буйрепа 
Kνs - параметр сопротивления вращению крыльчатки гидротормоза;
0<μ≤1 - коэффициент уменьшения вклада основного программного тормоза.
Контур обратной связи управления по отклонению буя от заданного углубления позволяет сформулировать закон управления САУ на корпусе в виде:

где  - поправка натяжения, пропорциональная отклонению углубления ув буя от заданного узу;
- поправка натяжения, пропорциональная отклонению углубления ув буя от заданного узу;
KT, τ - коэффициент жесткости управления по отклонению и постоянная времени тормозного устройства.
Для ПЗО с САУ в якоре соответствующий закон управления принимает вид:

где  - поправка натяжения буйрепа у якоря, пропорциональная отклонению углубления буя уВ от заданного уЗУ.
- поправка натяжения буйрепа у якоря, пропорциональная отклонению углубления буя уВ от заданного уЗУ.
Приведенные соотношения позволяют разработать САУ при размещении управляющей системы ПЗО как на корпусе, так и в якоре.
Таким образом предлагаемое техническое решение построения системы автоматического управления установкой плавучего объекта на заданное углубление исключает стопорения выборки буйрепа, сопровождающиеся растягивающими ударами, и тем самым сглаживает и минимизирует натяжение буйрепа в процессе установки буя на заданное углубление. Этим достигается возможность уменьшения потребной прочности буйрепа и, соответственно, его диаметра, а следовательно обеспечивается возможность размещения большей длины буйрепа меньшего диаметра при сохранении габаритов ПЗО. При прочих равных условиях, это позволяет соответствующим образом увеличить допустимую глубину места установки буя ПЗО. Кроме того, отсутствие стопорений выборки буйрепа позволяет наиболее быстро завершить процесс установки и, тем самым, минимизировать снос ПЗО течением от географической точки начала его развертывания, а также может быть использовано в технике изучения физических полей морей и океанов, а также в системах освещения подводной обстановки и воздействия на движущиеся надводные и подводные объекты заданного класса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВКИ ПЛАВУЧИХ ТЕЛ НА ЗАДАННОЕ УГЛУБЛЕНИЕ | 1997 |
|
RU2137672C1 |
| АВТОНОМНЫЙ ВСПЛЫВАЮЩИЙ БУЙ | 1992 |
|
RU2025395C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Устройство для регулирования длины буйрепа | 1979 |
|
SU885098A1 |
| БУФЕРНОЕ УСТРОЙСТВО | 2002 |
|
RU2228875C2 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| ЯКОРНОЕ УСТРОЙСТВО ДЛЯ ПОЗИЦИОННЫХ МОРСКИХ ОБЪЕКТОВ | 1971 |
|
SU428977A1 |
| Волнолом | 1983 |
|
SU1129277A1 |
| Якорное устройство для буев | 1974 |
|
SU499173A1 |
| УСТРОЙСТВО ПОДЪЕМА ОБЪЕКТА, ПОСТАВЛЕННОГО С СУДНА НА ДНО ВОДОЕМА, И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2000 |
|
RU2189331C2 |
Изобретение относится к области морской техники, а именно к плавучим заякориваемым объектам, устанавливаемым на заданное углубление. Способ для безударной автоматической установки плавучих объектов на заданное углубление и система для его реализации относятся к плавучим заякориваемым объектам (ПЗО), буям, автономным океанографическим, гидроакустическим станциям и плавучим телам, устанавливаемым на заданное углубление в различных районах Мирового океана. Замкнутый контур обратной связи системы корректирует программное натяжение буйрепа из условия уменьшения отклонения плавучего объекта от заданного углубления. Изменение управляющего сигнала пропорционально измеряемой разнице между текущим углублением объекта в процессе установки и величиной заданного углубления. Создаваемый исполнительным устройством управляемый тормозящий момент, воздействуя на вращение роликового механизма, регулирует натяжение и скорость развертывания буйрепа, что существенно снижает динамическую нагрузку на буйреп за счет непрерывного плавного изменения момента торможения без промежуточных стопорений в ходе процесса выборки, тем самым обеспечивая возможность уменьшения потребной прочности буйрепа и, как следствие, уменьшение его диаметра. Достигается снижение динамических нагрузок на буйреп. 2 н.п. ф-лы, 3 ил.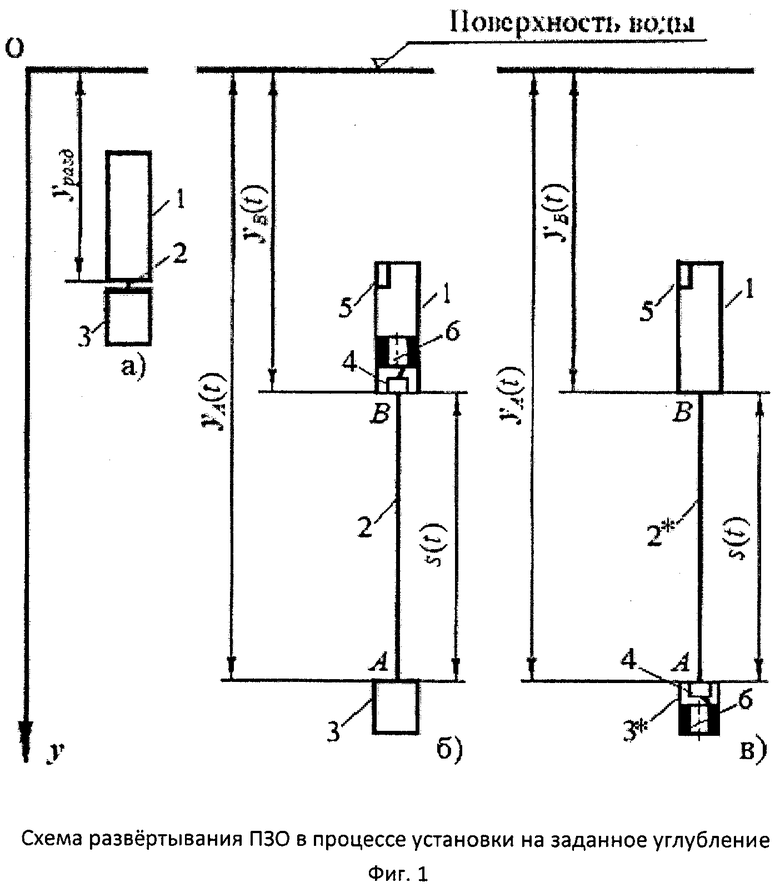
1. Способ безударной автоматической установки плавучих объектов на заданное углубление, включающий отделение плавучего объекта от якоря, выборку буйрепа, начало и прекращение сматывания буйрепа по команде гидростатического прибора, размещенного на плавучем объекте, при этом в момент прекращения сматывания осуществляют гашение динамических усилий с использованием роликового устройства, отличающийся тем, что устройство сматывания в виде бухты размещают в плавучем объекте или в якоре, осуществляют непрерывную выборку буйрепа, управляют его натяжением с учетом освобождающейся длины буйрепа и корректируют натяжение буйрепа с учетом уменьшения отклонения плавучего объекта от заданного углубления.
2. Система для реализации способа по п.1, содержащая плавучий объект, устройство выборки буйрепа, роликовое устройство и гидротормоз, отличающаяся тем, что система выполнена двухконтурной, в первом контуре которой выход программно-управляющего устройства подключен ко входу исполнительного устройства, которое по входу также соединено с выходом управляющего по отклонению устройства второго контура, включающего последовательно соединенные задающее устройство, сравнивающее устройство, выход которого соединен со входом управляющего по отклонению устройства, а сравнивающее устройство подсоединено к датчику глубины при этом исполнительное устройство оснащено управляемым электрически тормозом и гидротормозом с крыльчаткой, установленными на вал-шестернях роликового устройства.
| СПОСОБ УСТАНОВКИ ПЛАВУЧИХ ТЕЛ НА ЗАДАННОЕ УГЛУБЛЕНИЕ | 1997 |
|
RU2137672C1 |
| Привод поворота платформы экскаватора | 1984 |
|
SU1167278A1 |
| US 1212048 A1, 09.01.1917 | |||
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |

