(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕР СФЕРИЧЕСКИЙ | 2011 |
|
RU2469947C1 |
| Грейфер | 1987 |
|
SU1553512A1 |
| Гидравлический грейфер для укладки хлыстов в шеть | 1976 |
|
SU612892A1 |
| КОВШ ЭКСКАВАТОРА СФЕРИЧЕСКИЙ | 2016 |
|
RU2656286C1 |
| Двухчелюстный грейфер | 1974 |
|
SU527367A1 |
| Гидравлический грейфер | 1982 |
|
SU1031877A1 |
| Многочелюстной грейфер | 1986 |
|
SU1498694A1 |
| ГИДРАВЛИЧЕСКИЙ ГРЕЙФЕР | 2005 |
|
RU2301191C1 |
| Многочелюстной грейфер | 1986 |
|
SU1328278A1 |
| Грейфер | 1988 |
|
SU1533987A1 |
. Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повьшение надежности. Грейфер содержит челюсти 1, установленные в направляющих обоймах 3 с возможностью прямолинейного перемещения. Направляющие обоймы соединены с несущим кронштейном 4 с возможностью поворота в вертикальной плоскости. Обоймы выполнены с зубчатыми венцами, а грейфер снабжен корпусом с размещенными в нем зубчатыми коническими колесами, находящимися в зацеплении с зубчатыми венцами обойм. Для ограничения перемещений обоймы челюсти снабжены упорами. Обоймы 3 своими концами соединены пружиной 15. Такая конструкция грейфера позволяет осуществлять симметричное перемещение челюстей по линии наименьшего сопротивления . 1 3.п. ф-лы, 4 ил. с (О
Фиг. 1
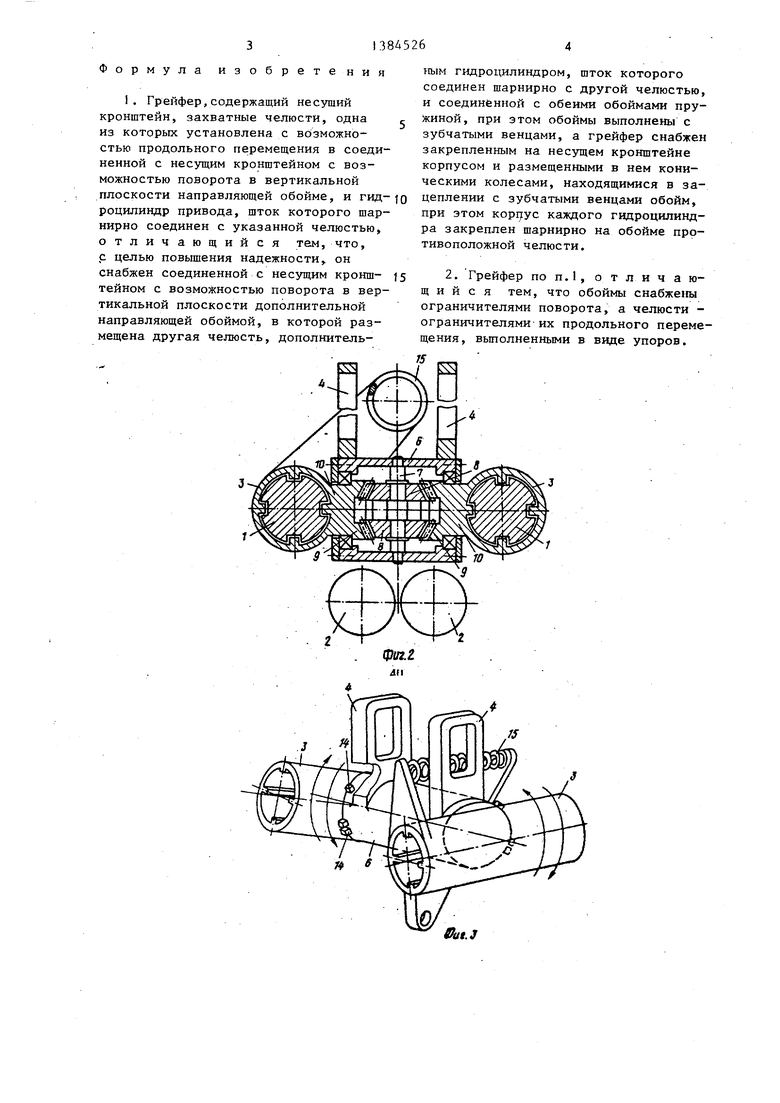
Изобретение относится к подъемно- транспортному машиностроению, в частности к грейферам.
Цель изобретения - повышение.на- дежности грейфера.
На фиг.1 представлена кинематическая схема грейфера; на фиг,2 - механизм синхронного поворота направляющих обойм; на фиг.З - то же, -аксоно- метрия; на фиг.4 - один из возможных вариантов работы грейфера.
Грейфер включает захватные челюсти 1, связанные между собой ершовыми гидроцилиндрами 2 и подвижно установленные в поворотных в вертикальной плоскости направляющих обоймах 3, взаимодействующих при помощи шарнирного соединения с несущим кронштейном 4. Обоймы 3 содержат механизм синхронного поворота 5, состоящего из корпуса 6, который с наружной стороны жестко закреплен на несущем кронштейне 4 грейфера, а внутри снабжен осью 7 с установленными на ней коническими шестернями 8, причем зубья конических шестерен 8 одновременно взаимодействуют с зубчатыми венцами 9, расположенными на торцах хвостовиков 10,, которыми снабжена каждая из направляющих обойм 3, закрепленных в корпусе 6 с возможностью поворота. Корпус 11 каждого силового гидроцилиндра 2 шарнирно закреплен на соответствующей направляющей обой- ме 3, а их штоки 12 шарнирно соединены с захватными челюстями 1, установленными в противоположных направляющих обоймах 3, при этом захватные челюсти 1 снабжены ограничителями их продольного перемещения 13, а сами направляющие обоймы 3 снабжены ограничителями их поворота 14 относительно корпуса 6, механизмом синхронного поворота 5 и дополнительно взаимодействуют между собой при помощи нагрузочной пружины 15.
Грейфер работает следующим образом.
Перед зачерпыванием штоки 12 силовых гидроцилиндров 2, параллельно подключенных в гидросистему грейфера, полностью выдвигают из направляющих обойм 3 захватные челюсти 1 до ограничителей 13, а под действием нагрузочной пружины 15, благодаря наличию ограничителей 14 обеспечивается необходимьш для нормальной работы угол наклона направляющих обойм 3 и
0
5 0 5 0 Q .г
0
расположенных в них захватных челюстей 1, В таком положении грейфер опускают на зачерпываемый груз и включают в работу гидроцилиндры. Если зачерпываемая среда, например сыпучие материалы, не .оказывает про- |цессу зачерпывания значительного сопротивления, то за счет действия наг- рузочной пружины 15 первоначально происходит прямолинейное перемещение захватных челюстей 1 в направляющих обоймах 3 до ограничителей 13. При дальнейшем ходе штоков 12 гидроцилиндров 2 происходит поворот направляющих обойм 3 до полного сведения расположенных в них захватных челюстей. При этом последние благодаря наличию механизма синхронного поворота 5 обеспечивает надежное и равномерное заполнение зева грейфера.
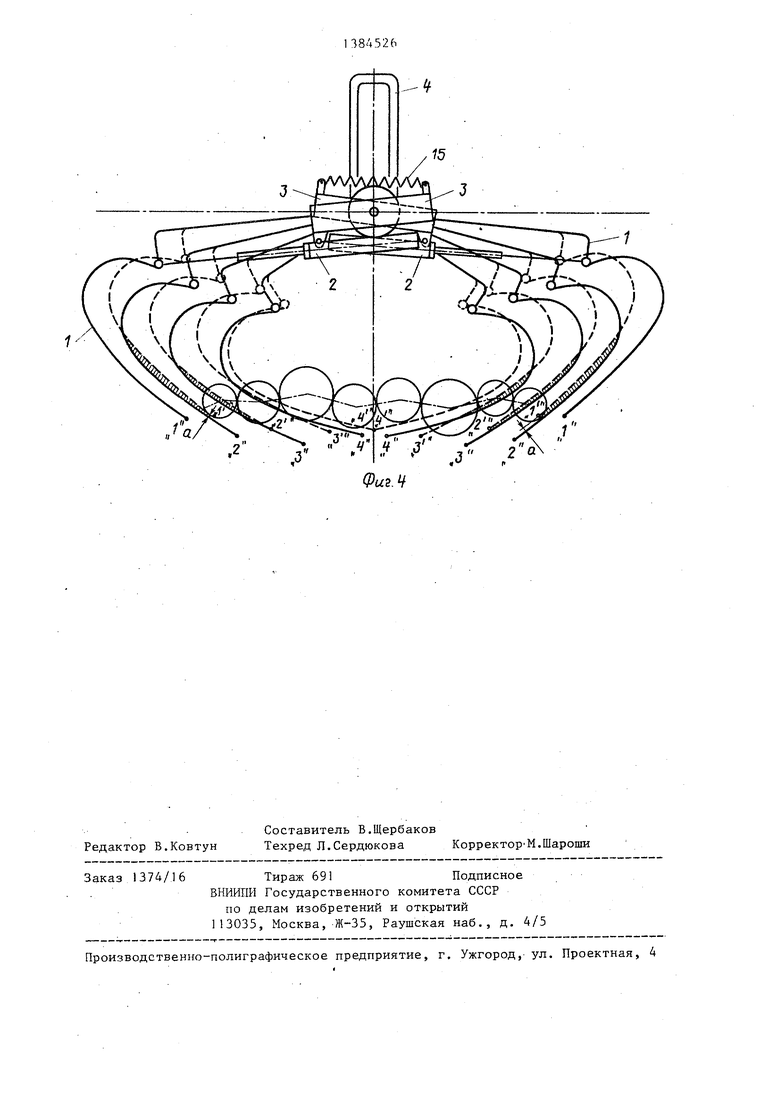
При зачерпывании крупнокусковых или цилиндрических материалов неизбежен процесс образования балок. Работа грейфера в данном случае может происходить, например, следующим образом.
Первоначально происходит прямолинейное перемещение захватных челюстей 1 в направляющих обоймах 3 до момента образования балки (на фиг.4 перемещение конца челюсти с положения 1 до- ). Захватные челюсти, встретив на своем пути значительное сопротивление, стремятся уйти в зону более низкого сопротивления, т.е. происходит поворот последних вместе с направляющими обоймами 3 (на фиг.4 - с положения 1 до 2) до до возникновения на данном перемещении усилия большего чем необходимо н а прямолинейное перемещение. При этом следует отметить, что как такового разрущения балки происходить не будет, так как, осуществляя поворот, захватные челюсти отходят от данной балки на некоторую величину, не прекращая при этом процесса зачерпывания. Последующие этапы будут автоматически аналогично чередоваться вплоть до полного заполнения грейфера. Величина прямолинейных и радиальных перемещений захватных челюстей 1 в каждом случае будут различны и будут определяться характеристикой и составом зачерпываемой среды.
Разгрузка грейфера осуществляется обратной работой гидроцилиндров 2.
Формула изобретения
J5 2, Грейфер по п.1, отличающийся тем, что обоймы снабжены ограничителями поворота, а челюсти - ограничителями их продольного перемещения, выполненными в виде упоров.
Г5
tlut.3
„ a
Фи.Ч
| ПОГРУЗЧИК ДЛИННОМЕРНЫХ ГРУЗОВ | 0 |
|
SU359231A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
