1
Изобретение относится к грузозахватным устройствам для подъемных кранов, а именно к двухчелюстным грейферам открывающимся посредством смонтированных на них электродвигателей.
Известен двухчелюстный грейфер, содержащий направляющую раму и подвижные вдо нее грузовые балки, несущие челюсти с блоками замыкающего полиспаста.
Однако известные грейферы не обеспечивают рационального положения челкх;тей в процессе зачерпывания и тем самым имеют пониженное заполнение грузом.
Цель изобретения - повыщение заполнения грейфера грузом путем обеспечения рационального положения челюстей в течение всег процесса зачерпывания.
В предложенном грейфере эти недостатки устранены за счет того, что на направляющей раме жестко установлены кронштейны, длина которых меньше величины хода грузовых балок, причем последние снабжены осью и подпружиненной защелкой с продольным пазом, а верхние концы каждой челюсти снабжены упорами, взаимодействующими с защелками.
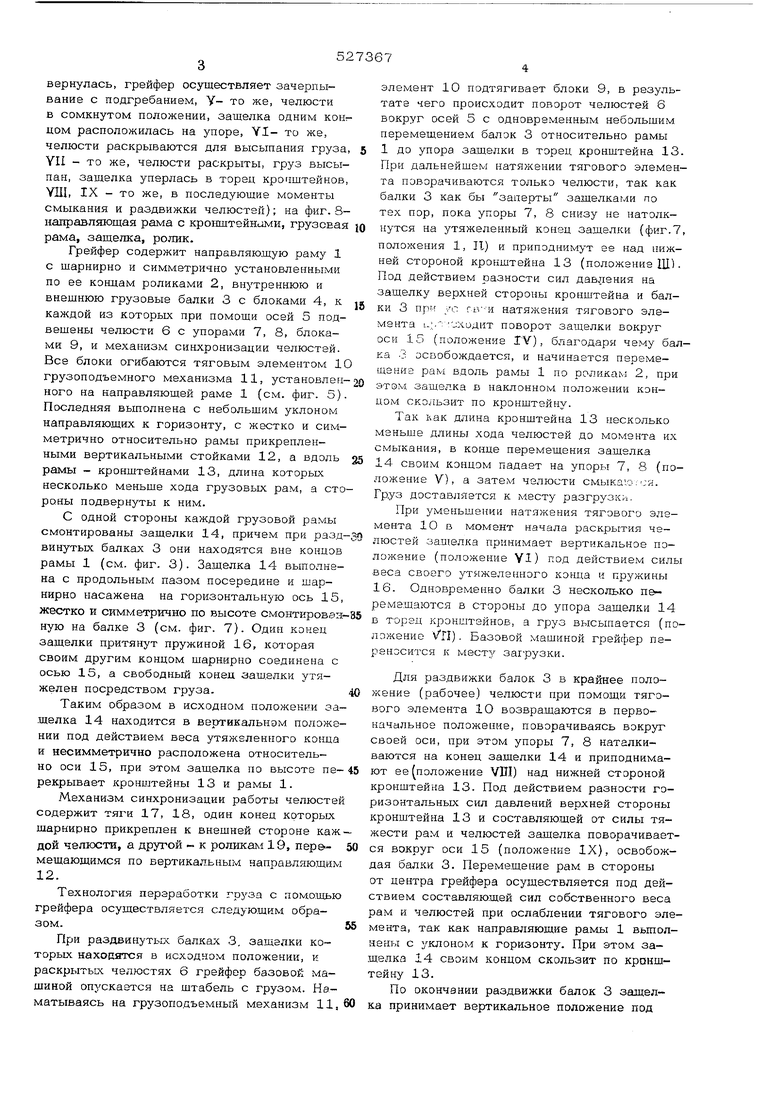
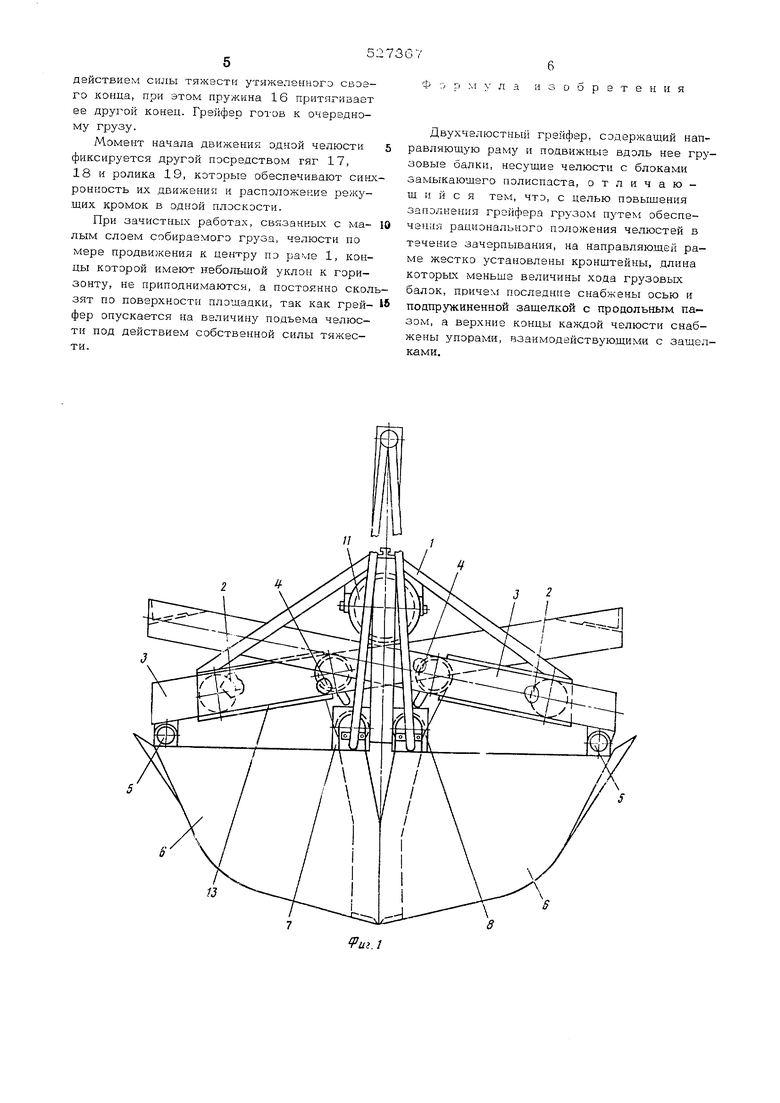
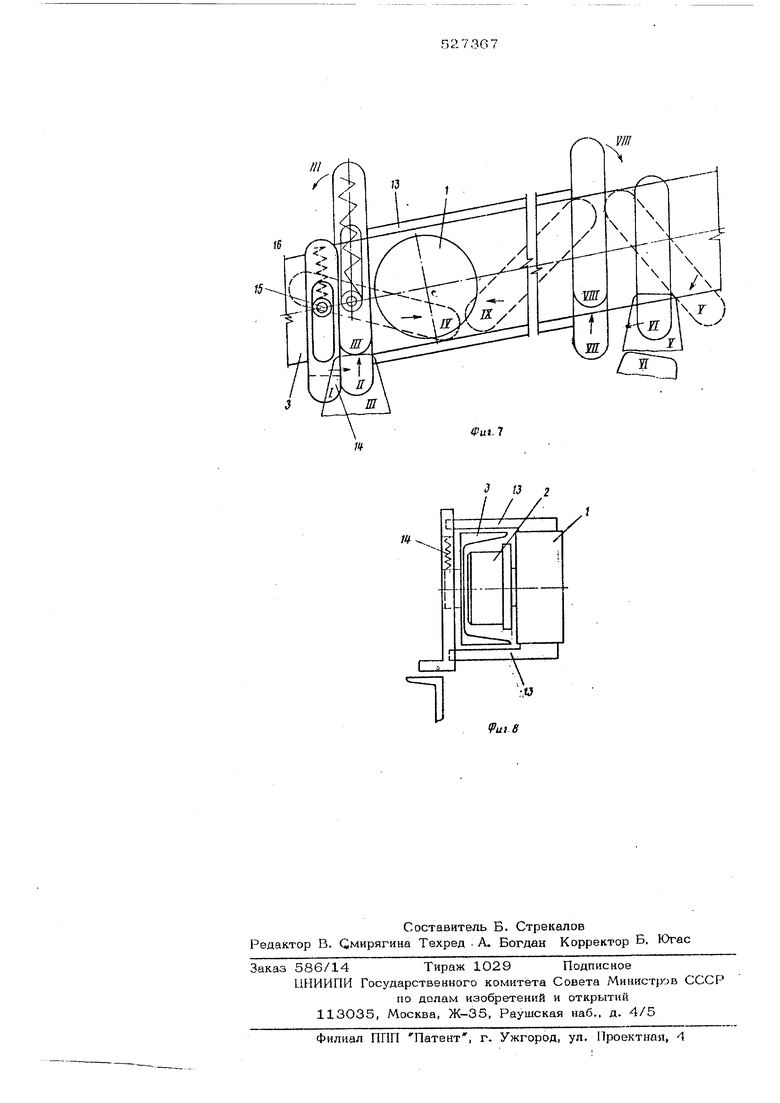
На фиг. 1 изображен предлагаемый грейфер с сомкнутыми челюстями, вид сбоку: на фиг. 2 - то же, вид сверху; на фиг. 3 гре фер с разомкнутыми челюстями на фиг. 4челюсть грейфера, вид сбоку (А- положение челюсти с упором и защелки перед окончанием ,гребка Б- то же, после окончания гребка); на фиг. 5 - кинематическая схема (запасовка гибкого тягового органа и расположение грузоподъемного механизма и блоков): на фиг. 6 - грейфер в момент высыпания груза (стрелками показано вращение челюстей, направление движения грузовых рам, ролика синхронизатора; на фиг. 7схема взаимного расположения защелки, направляющей рамы с кронштейнами, грузовой рамы с челюстями при зачерпывании с предварительным подгребанием (стрелками показано движение защелкк: 1 - положении упомянутых узлов при разомкнутых челюстях, И - то же, при вращении челюстей вокруг своей оси, Д1 - то же упор челюсти приподнял защелку, IV - то же, защелка повернулась, грейфер осуществляет зачерпывание с подгребанием, У- то же, челюсти в сомкнутом положении, защелка одним конг цом расположилась на упоре, YI- то же, челюсти раскрываются для высыпания груза YII - то же, челюсти раскрыты, груз высыпан, защелка уперлась в торец кронштейнов, Д1, IX - то же, в последующие моменты смыкания и раздвижки челюстей); на фиг. Sнаправлглющая рама с кронштейнами, грузовая рама, защелка, ролик. Грейфер содержит направляющую раму 1 с шарнирно и симметрично установленными по ее концам роликами 2, внутреннюю и внещнюю грузовые балки 3 с блоками 4, к каждой из которых при помощи осей 5 подвешены челюсти 6 с упорами 7, 8, блоками 9, и механизм синхронизации челюстей. Все блоки огибаются тяговым элементом 10 грузоподъемного механизма 11, установленного на направляющей раме 1 (см. фиг. 5) Последняя вьшолнена с небольшим уклоном направляющих к горизонту, с жестко и симметрично относительно рамы прикрепленными вертикальными стойками 12, а вдоль рамы - кронштейнами 13, длина которых несколько меньше хода грузовых рам, а сто роны подвернуты к ним. С одной стороны каждой грузовой рамы смонтированы защелки 14, причем при разд винутых балках 3 они находятся вне концов рамы 1 (см. фиг. 3). Защелка 14 выполнена с продольным пазом посередине и шарнирно насажена на горизонтальную ось 15, жестко и симметрично по высоте смонтирован ную на балке 3 (см. фиг. 7). Один конец защелки притянут пружиной 16, которая своим другим концом шарнирно соединена с осью 15, а свободный коней заш.елки утяжелен посредством груза. Таким образом в исходном положении защелка 14 находится в вертикальном положении под действием веса утяжеленного конца к несимметрично расположена относительно оси 15, при этом защелка по высоте перекрывает кронштейны 13 и рамы 1. Механизм синхронизации работы челюстей содержит тяги 17, 18, один конец которых шарнирно прикреплен к внешней стороне каж дой челюсти, а другой - к роликам 19, перемещающимся по вертикальным направляющим 12. Технология переработки груза с помощью грейфера осуществляется следующим образом. При раздвинутых балках 3, защелки которых находятся в исходном положении, и раскрытых челюстях 6 грейфер базовой машиной опускается на штабель с грузом. Нэматываясь на грузоподъемный механизм 11, 60 элемент 10 подтягивает блоки 9, в результате чего происходит поворот челюстей 6 вокруг осей 5 с одновременным небольшим перемещением балок 3 относительно рамы 1 до упора защелки в торец кронштейна 13. При дальнейшем натяжении тягового элемента поворачиваются только челюсти, так как балки 3 как бы заперты зашелками по тех пор, пока упоры 7, 8 снизу не натолкнутся на утяжеленный конец защелки (фиг.7, полох ения 1, II) и приподнимут ее над нижней стороной кронштейна 13 (положение Щ). Под действием разности сил давления на защелку верхней стороны кронштейна и балки 3 при vC ГгГИ натяжения тягового элемента I.;..: входит поворот защелки вокруг оси 15 (положение lY), благодаря чему балка 3 освобождается, и начинается перемещаниа рам вдоль рамы 1 по роликам 2, при этом защелка в наклонном положении концом скользит по кронштейну. Так как длина кронштейна 13 несколько меньше длины хода челюстей до момэнта их смыкания, в конце перемещения защелка 14 своим концом падает на упоры 7, 8 (положение V), а затем челюсти смыкаю:;я. Груз доставляется к месту разгрузки. При уменьшении натяжения тягового элемента Ю в момент начала раскрытия челюстей за.шелка принимает вертикальное положение (положение Y1) под действием силы веса своего утяжеленного конца и пружины 16. Одновременно балки 3 несколько перемещаются в стороны до упора защелки 14 в торед кронштейнов, а груз высыпается (положение Vri). Базовой машиной грейфер переносится к месту загрузки. Для раздвижки балок 3 в крайнее положение (рабочее) челюсти при помощи тягового элемента 10 возвращаются в первоначальное положе 1ие, поворачиваясь вокруг своей оси, при этом упоры 7, 8 наталкиваются на конец защелки 14 и приподнимают ее положение Vlfl) над нижней стороной кронштейна 13. Под действием разности горизонтальных сил давлений верхней стороны кронштейна 13 и составляющей от силы тяжести рам и челюстей зашелка поворачивается вокруг оси 15 (положение IX), освобождая балки 3. Перемещение рам в стороны от центра грейфера осуществляется под действием составляющей сил собственного веса рам и челюстей при ослаблении тягового элемента, так как направляющие рамы 1 вьшолнены с уклоном к горизонту. При этом защелка 14 СБОИМ концом скользит по кронштейну 13. По окончании раздвижки балок 3 зашелка принимает вертикальное положение под
действием силы тяжести утяжеленного свэего конца, при этом пружина 16 притягивает ее другой конец. Грейфер гоа-ов к очередному грузу.
Момент начала движения одной челюсти фиксируется другой посредством гяг 17, 18 и ролика 19, которые обеспечивают синхронность их движения и расположекие режущих кромок в одной плоскости.
При зачистных работах, связанных с малым слоем собираемого груза, челюсти по мере продвижения к центру по раме 1, концы которой имеют небольшой уклон к горизонту, не приподнимаются, а постоянно сколзят по поверхности площадки, так как грейфер опускается на величину подъема челюсти под действием собственной силы тяжести.
Ф о D м V Л а
о о р е т е н и
Двухчелюстный грейфер, содержащий направляющую раму и подвижные вдоль нее грузовые балки, несущие челюсти с блоками замыкающего полиспаста, отличающийся тем, что, с целью повышения заполнения грейфера грузом путем обеспечен:1я рационального положения челюстей в течение зачерпывания, на направляющей раме жестко установлены кронщтейны, длина которых меньше величины хода грузовых балок, причем последние снабжены осью и подпружиненной защелкой с продольным пазом, а верхние концы каждой челюсти снабжены упорами, взаимодействующими с защелками.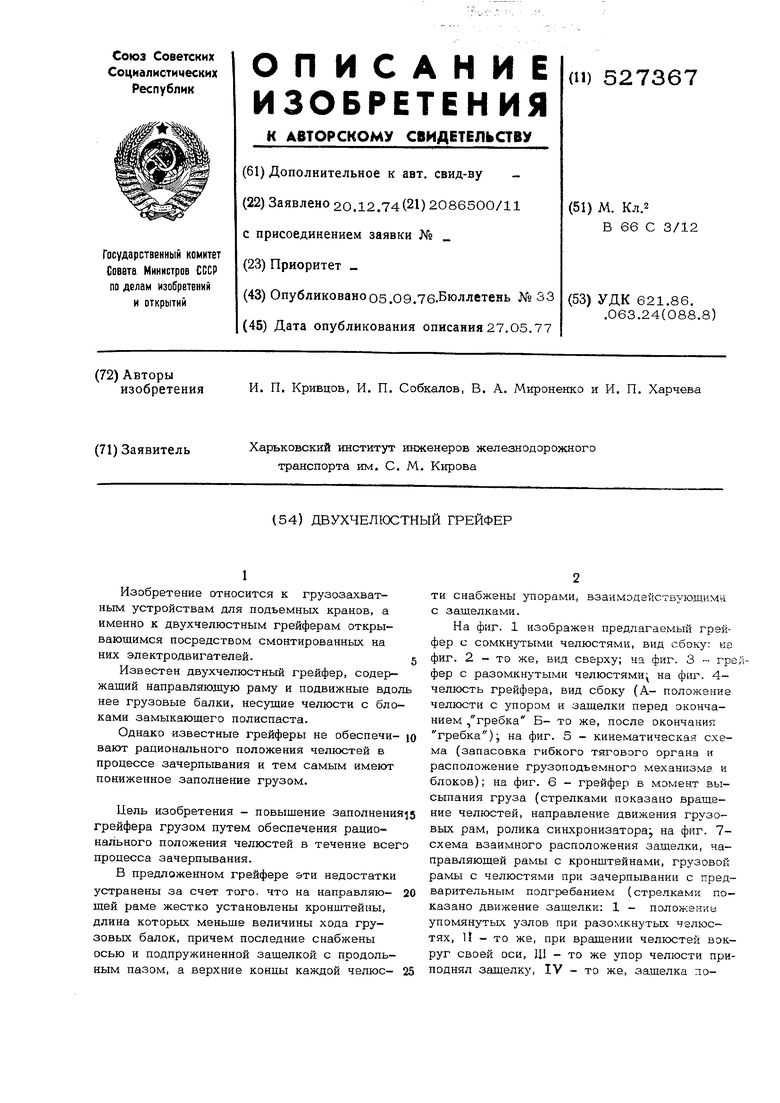
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухчелюстной грейфер | 1981 |
|
SU1020357A1 |
| Гидравлический грейфер | 1982 |
|
SU1031877A1 |
| Одноканатный грейфер | 1983 |
|
SU1085927A1 |
| Погрузочная машина | 1983 |
|
SU1102995A1 |
| Грейфер | 1986 |
|
SU1384526A1 |
| Грейфер с устройством для определения кривой зачерпывания | 1988 |
|
SU1581678A1 |
| Двухчелюстной грейфер | 1958 |
|
SU115787A1 |
| Грейферный пробоотборник | 1989 |
|
SU1776722A1 |
| ГРЕЙФЕРНОЕ УСТРОЙСТВО ДЛЯ ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011629C1 |
| Грейфер для сыпучих материалов | 1978 |
|
SU740688A1 |

12
Г / г
12
тттгт
6 J
/7 W / // Ш Уиг.г
(6
Рщ. 7
3 13 2
ГТ.1
.,W
Pui 8
