Изобретение относится к подъемно-транспортной технике, конкретнее к грейферным механизмам предназначенным для подгребания, захвата, подъема и транспортировки материалов, предварительно находящихся в рассредточенном состоянии.
Известен гидравлический грейфер, содержащий челюсти, соединенные с рамой, силовой привод челюстей, представляющий собой неполновопоротный лопастной двигатель 1.
Недостаток грейфера заключается в низкой производительности при зачерпывании рассредоточенного материала, лежащего как на суше, так и на поверхности воды.
Цель изобретения - повышение производительности.
Поставленная цель достигается тем, что в гидравлическом грейфере, содержащем челюсти, соединенные с рамой, силовой привод челюстей, представляк)щий собой неполноповоротный лопастной двигатель, челюсти соединены с рамой посредством балок переменной длины, одни концы которых соединены посредством дополнительных механизмов поворота, представляющих собой гидравлические неполноповоротные лопастные двигатели, с рамой, а другие - с челюстями в их средней части, при этом приводы поворота челюстей также размещены в их средней части.
Кроме того, каждая балка выполнена телескопической, а привод балки представляет собой гидроцилиндр, корпус которого закреплен на наружной части балки, а шток на внутренней.
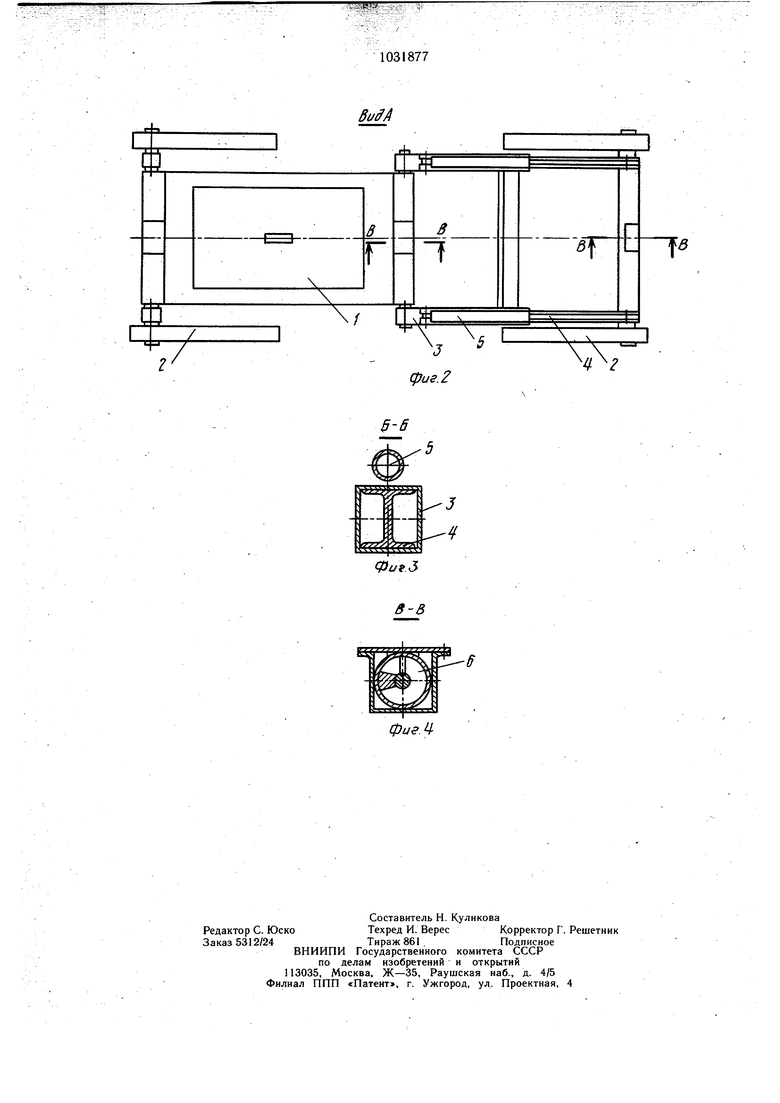
На фиг. 1 схематично изображен предлагаемый грейфер; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 2 Грейфер состоит из рамы 1 с установленными на ней гидравлическим приводом и механизмом поворота грейфера вокруг вертикальной оси (на фиг. 2 совмещены с рамой 1), челюстей 2 и балок переменной длины. Балки переменной длины выполнены телескопическими, состоящими из наружной 3 и внутренней 4 частей (фиг. 3) Изменение длины этих балок осуществляется гидроцилиндром 5, смонтированным корпусом на части 3, а штоком - на части 4. Балки переменной длины своими концами шарнирно соединены с рамой 1 и челюстями 2. Челюсти 2 и балки переменной длины оснащены механизмами 6 поворота вокруг осей соответствующих шарниров, которые
выполнены в виде моментных гидроцилиндров (фиг. 4). Концы балок при минимальной их длине двигаются по траектории 1, при максимальной - по траектории II 5 (фиг. 1).
Приводами механизма смыкания челюстей 2, механизма поворота грейфера вокруг вертикальной оси, приводами балок переменной длины, а также приводами механизмов поворота балок и челюстей вокруг
0 осей сортветствующих щарниров управляют дистанционно из кабины крановщика.
Гидравлический грейфер работает следующим образом.
При захвате материала, находящегося в рассредоточенном состоянии, грейфер
приводится в раскрытое положение. Для этого гидроцилиндром 5 заставляют выдвинуться внутреннюю часть 4 относительно внешней части 3 на требуемую длину. Затем балки переменной длины с помощью
Q соответствующего механизма 6 поворота ставятся в горизонтальное положение, при этом челюсти 2 поворачивают относительно внещней части балок так, чтобы происходило зачерпывание. Далее раму 1 ориентируют над материалом. Опускают грейфер
5 и начинают подтягивать гидроцилиндрами 5 челюсти 2, поворачивая их и балки по мере потребности. Это особенно необходимо делать при зачерпывании на воде, чтобы исключить подныривание бревен за челюсти. После полного подтягивания осуществляется поворот балок до смыкания челюстей 2.
При необходимости челюсти 2 смыкаются на разных уровнях и зажимают захваченный материал. Добиваются этого несимметричным подтягиванием внутренних час5 тей 4 в наружные 3 гидроцилиндром 5.
Разгрузка грейфера осуществляется поворотом либо челюстей 2, либо балок, либо тех и других одновременно, причем как синхронно, так и несинхронно. Разгрузка может происходить и при смещении челюстей 2 одна относительно другой.
Предлагаемый грейфер позволяет существенно повысить производительность, так как при зачерпывании рассредоточенных материалов, например у грейферов ЛТ-59,
зев остается незаполненным после первого зачерпывания на 82°/о, позволяет производить раскладку зачерпнутого материала в щель путем смещения челюстей, что исключает необходимость применения других механизмов.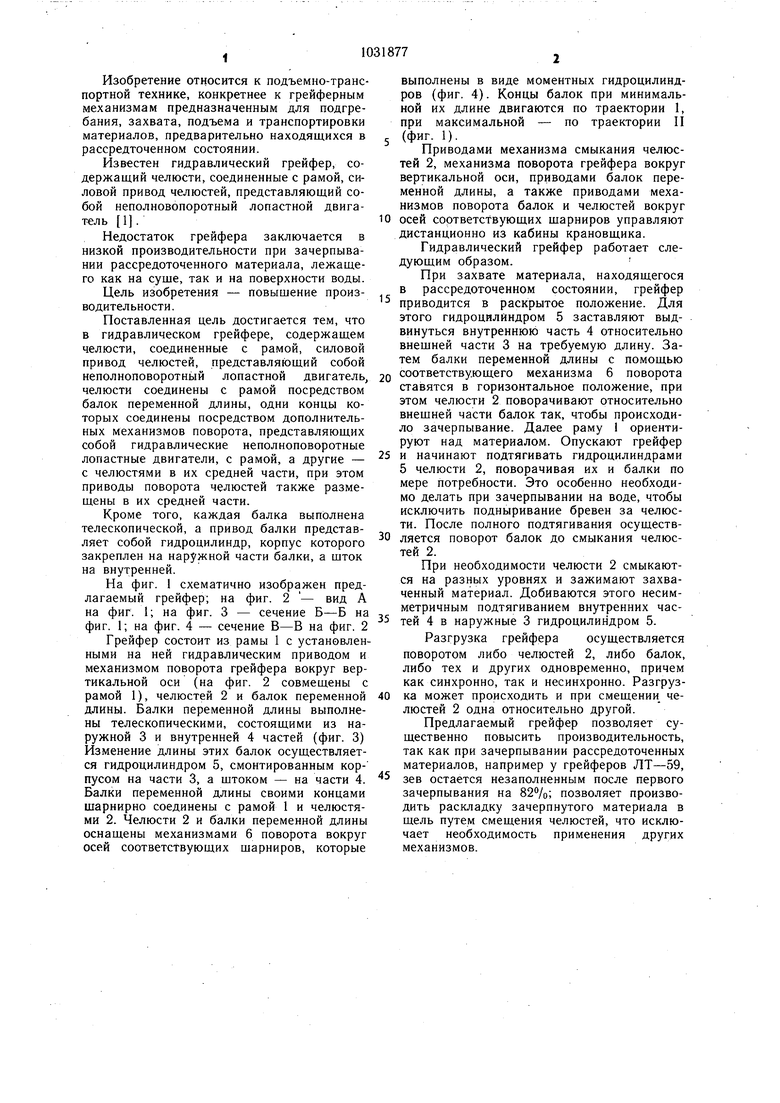
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейфер | 1980 |
|
SU954356A1 |
| Грейфер В.С.Наймана системы МЛТИ | 1982 |
|
SU1096191A1 |
| Грейфер | 1981 |
|
SU965954A1 |
| Гидравлический грейфер для укладки хлыстов в шеть | 1976 |
|
SU612892A1 |
| Многочелюстной грейфер | 1982 |
|
SU1070114A1 |
| ГИДРАВЛИЧЕСКИЙ ГРЕЙФЕР | 2005 |
|
RU2301191C1 |
| Грейфер | 1986 |
|
SU1384526A1 |
| Двухчелюстный грейфер | 1974 |
|
SU527367A1 |
| Подгребающий грейфер | 1980 |
|
SU908735A1 |
| Гидравлический грейфер | 1982 |
|
SU1062171A2 |
1. ГИДРАВЛИЧЕСКИЙ ГРЕЙФЕР, содержащий челюсти, соединенные с рамой, силовой привод челюстей, представляющий собой неполноповоротный лопастJ X // // // II г ной двигатель, отличающийся тем, что, с целью увеличения производительности, челюсти соединены с рамой посредством балок переменной длины, одни концы которых соединены посредством дополнительных механизмов поворота, представляющих собой гидравлические неполноповоротные лопастные двигатели, с рамой, а другие - с челюстями в их средней части, при этом приводы поворота челюстей также размещены в их средней части. 2. Грейфер по п. 1, отличающийся тем, что каждая балка выполнена телескопической, а привод балки представляет собой гидроцилиндр, корпус которого закреплен на наружной части балки, а шток - на внутренней. (Л ОО 00 fpue.i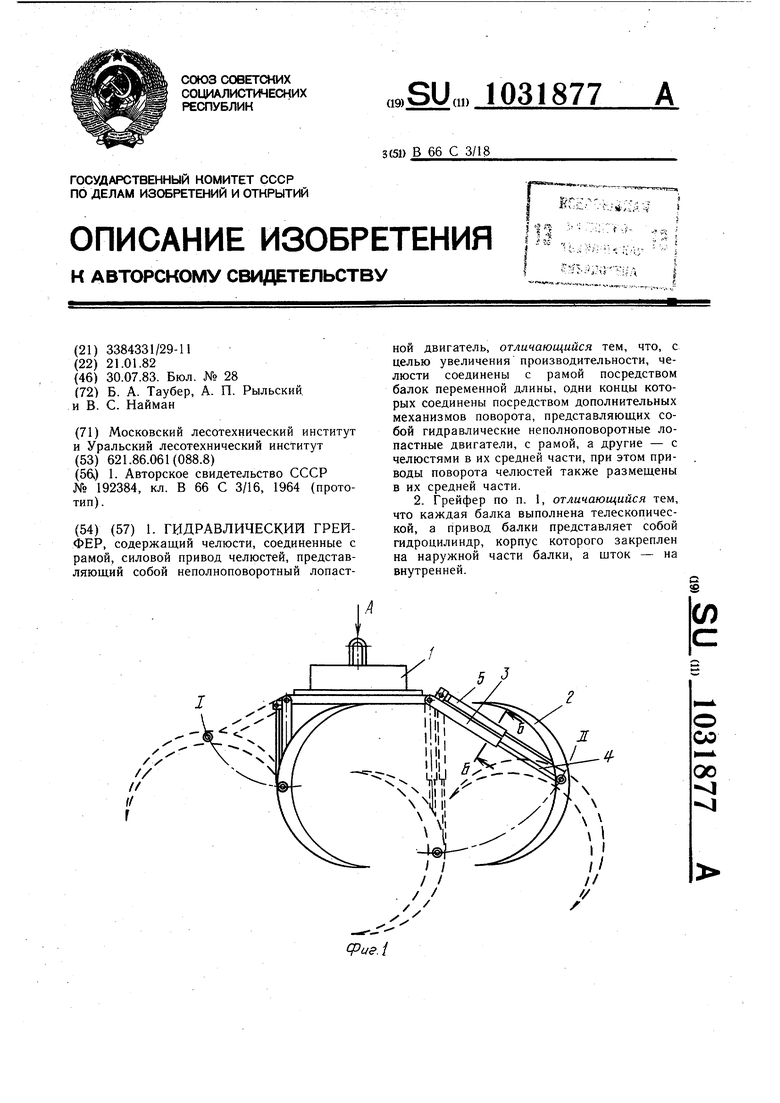
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU192384A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
