Изобретение относится к горнодобывающему оборудованию и предназначено для исследования горных машин в лабораторных условиях.
Целью изобретения является повышение точности исследования.
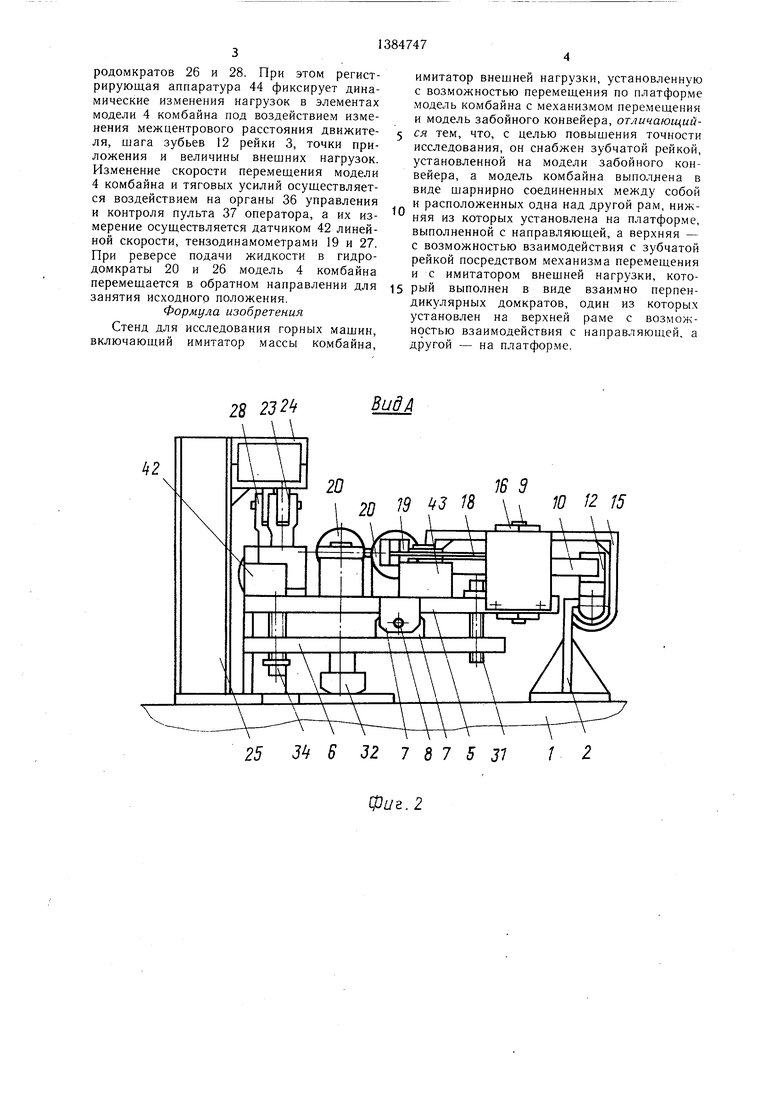
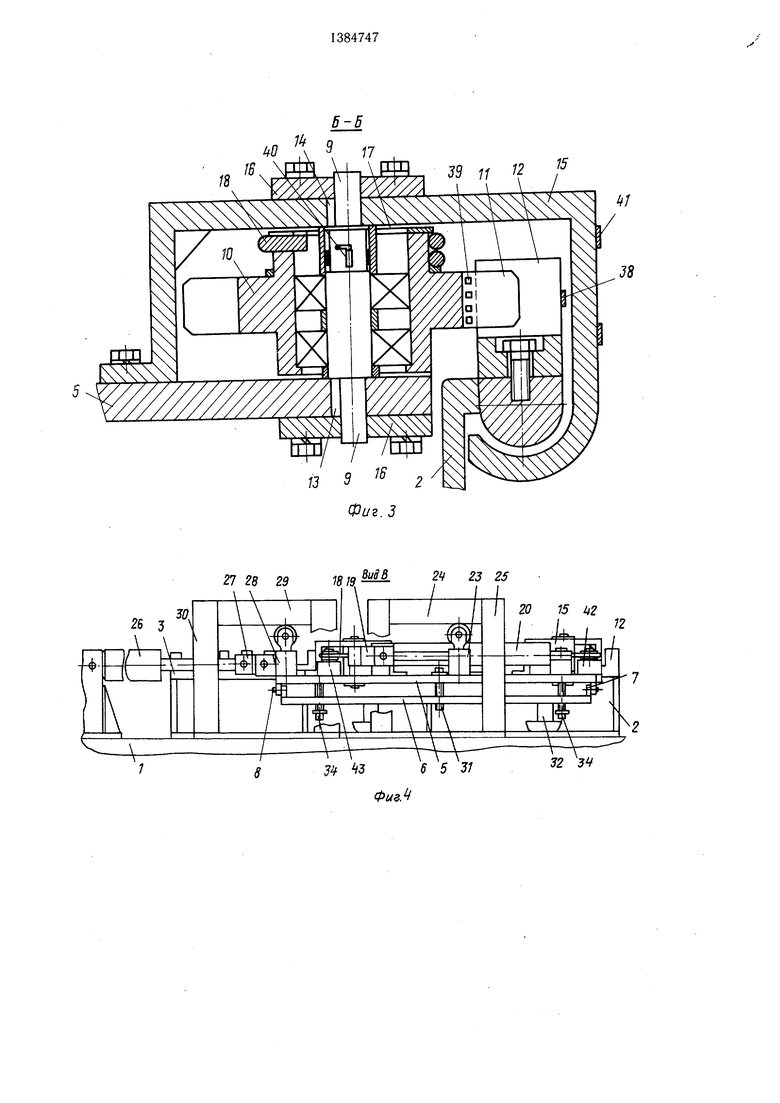
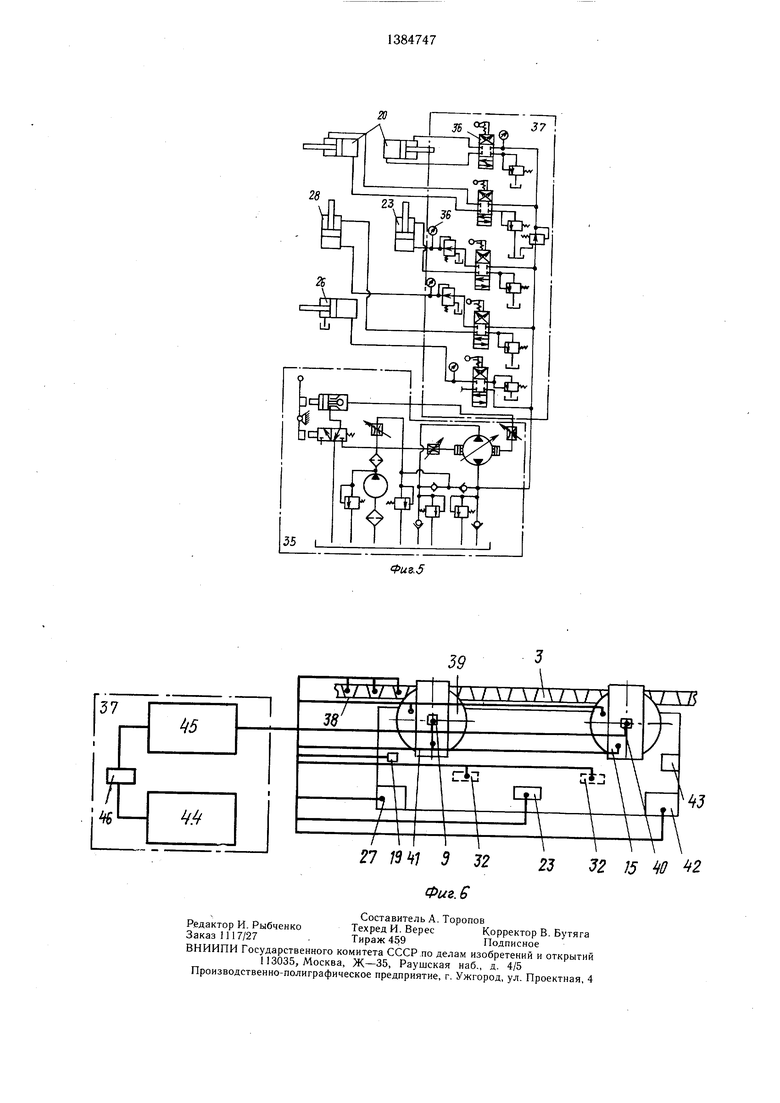
На фиг. 1 изображен стенд для исследования горных машин, обш,ий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. I; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - гидравлическая схема стенда для исследования горных машин; на фиг. 6 - блок-схема измерений.
Стенд для исследования горных машин содержит платформу 1, на которой установлена модель 2 забойного конвейера с рейкой 3 и модель 4 комбайна. Модель 4 комбайна содержит верхнюю 5 и нижнюю 6 рамы, связанные между собой посредством проушин 7 и пальцев 8. На верхней раме 5 модели 4 комбайна посредством осей 9 установлены приводные звездочки 10, зуб.ья 11 которой взаимодействуют с зубьями 12 рейки 3. Оси 9 закреплены в пазах 13 верхней рамы 5 и пазах 14 захватов 15 посредством планок 16. Приводные звездочки 10 снабжены барабаном 17 с тросом 18, связанным посредством тензодинамометров 19 со штоками гидродомкратов 20, установленных на верхней раме 5. Последняя снабжена имитатором 21 массы комбайна и имитатором 22 внешней нагрузки.
Имитатор 21 массы комбайна выпонен в виде гидродомкрата 23, шток которого взаимодействует с балкой 24 направляющей 25, установленной на платформе 1. Имитатор 22 внешней нагрузки содержит гидродомкрат 26, цилиндр которого закреплен на платформе 1, а шток посредством тензодинамометра 27 связан с верхней рамой 5, и гидродомкрат 28, цилиндр которого установлен на верхней раме, а шток взаимодействует с профильной балкой 29 направляюшей 30, установленной на платформе 1. Верхняя рама 5 содержит болт 3-1, взаимодействующий с нижней рамой 6. Последняя снабжена забойньши тензоопо- рами 32, взаимодействующими с направляющей 33 модели 2 конвейера, жестко закрепленной на платформе 1, и болтами 34, взаимодействующими с верхней рамой 5. Запитывание гидродомкратов 20, 23, 26 и 28 осуществляется от приводной станции 35, органы 36 управл.ения и контроля которой установлены на пульте 37 оператора.
На зубьях 12 рейки 3, зубьях 11 приводных звездочек 10, осях 9 и захватах 15 установлены тензодатчики 38, 39, 40 и 41. На верхней раме 5 установлены датчик 42 линейной скорости и датчики 43 угловой скорости, связанные с тросом 18. Тензодатчики 38, 39, 40 и 41, датчики линейной 42 и угловой 43 скоростей, тензодинамометры 19, 27, тензоопоры 32 связаны с регистрирующей аппаратурой 44 посредством тензоусилителей 45 и кнопочного поста 46, установленных на пульте 37 оператора.
Стенд для исследования горных машин работает следующим образом.
При подаче жидкости из приводной станции 35 в гидродомкраты 20 их штоки втягиваются и посредством тензодинамометров 19 и тросов 18 вращают барабаны 17 и приводные звездочки 10. Зубья 11 приводной звездочки 10 взаимодействуют с
0 зубьями 12 рейки 3 и, преодолевая сопротивление, создаваемое гидродомкратом 26 имитатора 22 внешней нагрузки и силы трения, перемещают модель 4 комбайна относительно модели 2 забойного конвейера, ее направляющей 33 и платформы 1. При
5 этом силы трения, адекватные реальным силам трения, возникающим в опорной системе комбайна, формируются в захватах 15 и тензоопорах 32 под воздействием имитаторов 21 массы комбайна и 22 внешней
Q нагрузки вследствие запитывания их гидродомкратов 23, 26 и 28 жидкостью и взаимодействия последних с профильными балками 24 и 29 направляющих 25 и 30. Под воздействием внещних сил, сил тяжести комбайна и сил сопротивлений, воздействую5 ш,их на модель 4 комбайна, адекватных натурному комбайну, на тензодатчиках 38 зубьев 12 рейки 3, 39 зубьев 11 приводных звездочек 10, 40 осей 9, 41 захватов 15, забойных тензоопор 32, тензоди- намометрах 19 и 27, датчиках 42 линейной
и 43 угловой скоростей звездочек 10 формируются сигналы, позволяющие сделать вывод о нагруженности элементов стенда, которые, усиливаясь тензоусилителями 45. и проходя через кнопочный пост 46, регистрируются регистрирующей аппарату5 рой 44.
Изменение углов взаимного расположения звездочек 10 реек 3 достигается за счет вывинчивания болтов 31 и 34, вследствие чего происходит изменение взаимного
0 расположения верхней 5 и нижней 6 рам, связанных проушинами 7 и пальцами 8 модели, 4 комбайна. Это позволяет зафиксировать на регистрирующей аппаратуре 44 изменения, происходящие в динамической системе бесцепной си.стемы подачи (БСП)
5 при таком расположении движителя. Изменение межцентрового расстояния движителя осуществляется за счет смещения в пазах 13 и 14 верхней рамы 5 и захватов 15 планок 16 и осей 9 с приводными звездочками 10 относительно рейки 3. Изменение шага зубьев 12 рейки 3 осуществляется за счет их взаимного смещения друг относительно друга в продольном направлении. Изменение точки приложения внешней нагрузки и ее величины осус ществляется смещением имитатора ,22 внешней нагрузки относительно платформы 1 и верхней рамы 5 и изменением давления жидкости, воздействующей на штоки гид0
родомкратов 26 и 28. При этом регистрирующая аппаратура 44 фиксирует динамические изменения нагрузок в элементах модели 4 комбайна под воздействием изменения межцентрового расстояния движите- 5 ся тем, что, с целью повышения точности ля, шага зубьев 12 рейки 3, точки при-исследования, он снабжен зубчатой рейкой,
ложения и величины внешних нагрузок. Изменение скорости перемещения модели
имитатор внешней нагрузки, установленную с возможностью перемещения по платформе модель комбайна с механизмом перемещения и модель забойного конвейера, отличающий4 комбайна и тяговых усилий осуществляетустановленной на модели забойного конвейера, а модель комбайна выполлена в виде щарнирно соединенных между собой
ся воздействием на органы 36 управленияи расположенных одна над другой рам, нижи контроля пульта 37 оператора, а их из- няя из которых установлена на платформе,
мерение осуществляется датчиком 42 линей-выполненной с направляющей, а верхняя -
ной скорости, тензодинамометрами 19 и 27.с возможностью взаимодействия с зубчатой
При реверсе подачи жидкости в гидро-рейкой посредством механизма перемещения
домкраты 20 и 26 модель 4 комбайнаи с имитатором внешней нагрузки, котоперемещается в обратном направлении для15 рый выполнен в виде взаимно перпензанятия исходного положения.дикулярных домкратов, один из которых
Формула изобретенияустановлен на верхней раме с возможСтенд для исследования горных машин,ностью взаимодействия с направляющей, а
включающий имитатор массы комбайна,другой - на платформе.
ся тем, что, с целью повышения точности исследования, он снабжен зубчатой рейкой,
имитатор внешней нагрузки, установленную с возможностью перемещения по платформе модель комбайна с механизмом перемещения и модель забойного конвейера, отличающийустановленной на модели забойного конвейера, а модель комбайна выполлена в виде щарнирно соединенных между собой
и расположенных одна над другой рам, ниж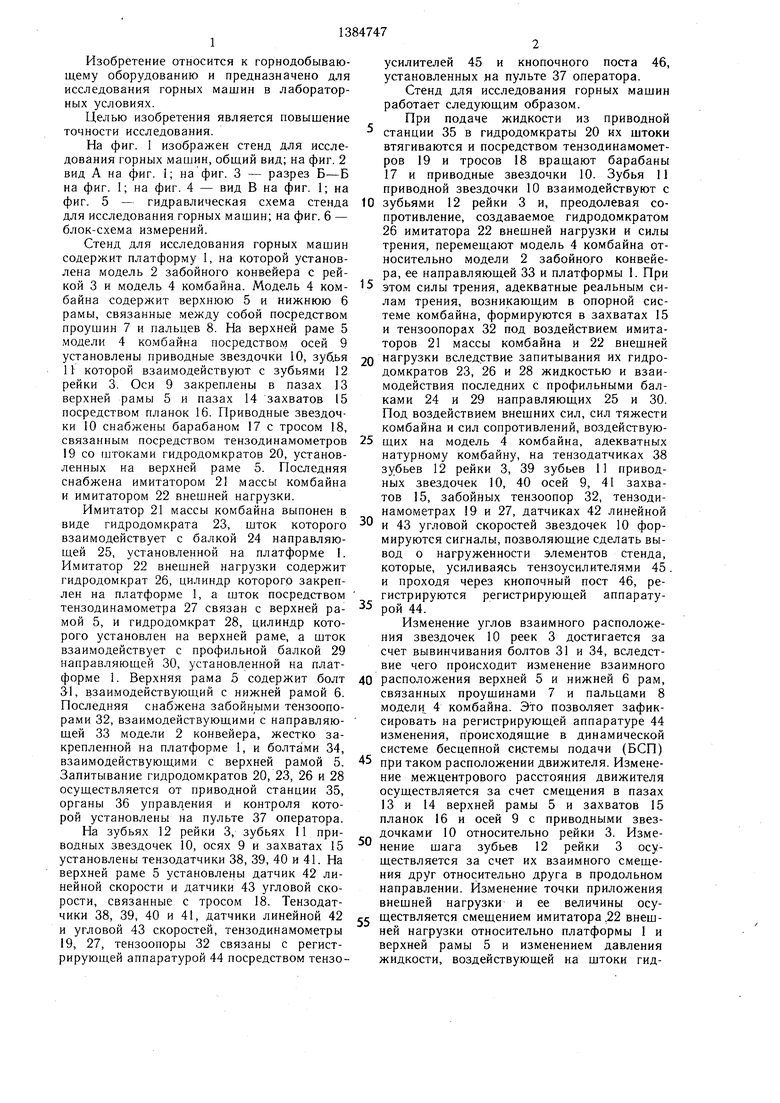
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи очистного комбайна | 1984 |
|
SU1155748A1 |
| Стенд для исследования горных машин | 1984 |
|
SU1155747A1 |
| Звездочка механизма подачи очистного комбайна | 1989 |
|
SU1705562A1 |
| Механизм подачи очистного комбайна | 1985 |
|
SU1317118A1 |
| Механизм подачи очистного комбайна | 1986 |
|
SU1361325A1 |
| Механизм подачи очистного комбайна | 1984 |
|
SU1218102A1 |
| Механизм подачи очистного комбайна | 1985 |
|
SU1273545A1 |
| Механизм подачи очистного комбайна | 1986 |
|
SU1411465A1 |
| Механизм подачи очистного комбайна | 1986 |
|
SU1411464A1 |
| ГОРНОПРОХОДЧЕСКИЙ ДОБЫЧНОЙ БЛОК (МОДУЛЬ) | 2013 |
|
RU2528350C2 |
Изобретение относится к горнодобывающему оборудованию и предназначено для исследования горных машин в лабораторных условиях. Цель изобретения - повышение точности исследования. Стенд для исследования горных машин включает модели 2, 4 конвейера и комбайна. Модель 4 комбайна выполнена в виде шарнирно соединенных между собой и расположенных одна над другой рам. Нижняя рама расположена на платформе и выполнена с направляющей 25. Верхняя рама 5 установлена с возможностью взаимодействия с зубчатой рейкой 3, расположенной на модели 2 заЮ 9 1В ;5 2D31 20 5 W J 3 JS 15 Б 12 26 3D 27 21 2S бойного конвейера, посредством механизма перемещения и имитатора 22 внешней нагрузки. Последний выпонен в виде взаимно перпендикулярных гидродомкратов (ГД) 26, 28. Цилиндр ГД 26 закреплен на платформе, а шток тензодинамометром 27 связан с верхней рамой 5. Цилиндр ГД 28 установлен на верхней раме 5, а шток взаимодействует с профильной балкой 29 направляющей 30, установленной на платформе. На верхней раме 5 расположен и имитатор 21 массы комбайна. Выполнен он в виде ГД 23, шток которого взаимодействует с балкой 24 направляющей 25, установленной на платформе. При подаче жидкости в ГД 20 их штоки втягиваются и посредством тензодинамометров 19 и тросов 18 вращают барабаны и приводные звездочки 10. Зубья звездочки 10 взаимодействуют с зубьями 12 рейки 3 и, преодолевая сопротивление, создаваемое ГД 26 имитатора 22 внешней нагрузки и силы трения, перемещают модель 4 комбайна относительно модели 2 забойного конвейера. Силы трения, адекватные реальным силам трения, формируются в захватах 15 и тензоопорах под воздействием имитаторов 21, 22. 6 ил. 31 20 5 W J 3 JS 15 Б 12 S сл оо 00 4 4 25 2ii J
fiZ
25 3 6 32 7 8 7 5 31 Г
ВидА
16 3
20 19 3 18 , Ю f2 15
гД4
V
п
фиг. 2
27 28 297ff/ M52 23 25
Фиг.З
32 ЪЧ
27 3 32 Фиг. 6
23 J2 15 0 2
| Стенд для испытания зубчато-реечных механизмов подачи горной машины | 1977 |
|
SU746108A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Стенд для исследования горных машин | 1984 |
|
SU1155747A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
