..
9
СО
оо
00
05
оо

Изобретение относится к эксцентриковым механизмам для преобразования движения. Целью изобретения является расширение кинематических возможностей. При вращений ведущего звена 5 диск 7 совершает плоскопараллельные движения по двум взаимно пер- пендикулярным направлениям относительно выступов 9 звеньев 5 и 6. При этом ведомое звено 6 вращается вокруг своей оси, эксцентричной оси ведущего звена 5, и за счет угла наклона диска 7 совершает возвратно-поступательное движение. 1 з.п. ф-лы, 2 ил.
Фиг. Г
W
Изобретение относится к машиностроению, в частности к эксцентриковым механизмам для преобразования движения.
Цель изобретения - расширение кинематических возможностей за счет обеспечения преобразования движения в различных направлениях и регулировки закона движения.
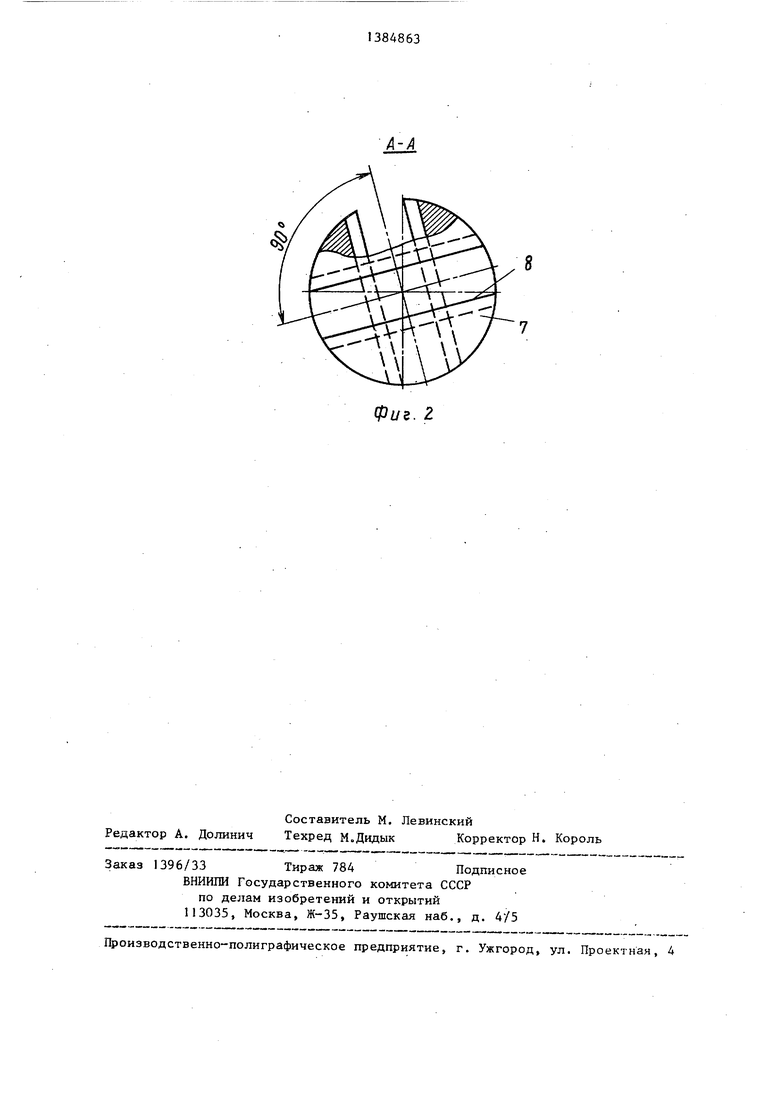
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Эксцентриковый механизм содержит корпус 1, размещенные в его опорах, выполненных в виде эксцентриковых втулок 2 и 3 с фиксаторами 4 эксцен- рично друг другу, соответственно, ведущее и ведомое звенья 5 и 6 и расположенное между ними промежуточ- ное звено, выполненное в виде наклонного диска 7 с диаметральными направляющими элементами 8, крестообразно расположенными по обеим ei:o сторонам и выполненными, например, короб- чатыми. Ведущее звено 5 и ведомое звено 6 имеют ответные направляющие элементы в виде диаметральных высту-г пов 9, выполненных, например, Т-обраными и входящих в зацепление с соот- ветствующими направляющими элементами 8. Обращенные к диску 7 поверхности звеньев 5 и 6 наклонены под равным углом к осям опор.
Эксцентриковый механизм работает следующим образом.
При вращении ведущего звена 5 диск 7 совершает плоскопараллельные движения по двум взаимно перпендикулярным направлениям относительно выступов 9 звеньев 5 и 6. При этом ведомое звено 6 вращается вокруг
своей оси, эксцентричной оси ведущего звена 5, и за счет угла наклона диска 7 совершает возвратно-поступательные движения.
Механизм ббратим, поэтому ведущее звено может быть ведомым. Если необходимо иметь только возвратно-поступтельное движение ведомого звена 6, то необходимо вращать эксцентриковую втулку 2, ус танов на ведущем звене 5, которое при этом необходимо удерживать от проворота.
Величина хода возвратно-поступательного движения ведомого звена зависит от взаимного расположения, эксцентриковых втулок 2 и 3.
Формула изо б р е т е н и я
фиг. г
| Эксцентриковый механизм | 1981 |
|
SU1028918A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
