2.Механизм по п. 1, отличающийся тем, что механизм снабжен упором, имеющим параллельный направляющим скос и закрепленным на корпусе через упругий элемент, а другой конец промежуточного звена имеет такой же скос, взаимодействующий со скосом упора.
3.Механизм по п. 1, отличающийся тем, что, с целью повыщения надежности в ведущем звене выполнено дополнительное цилиндрическое отверстие, симметричное основному, в другой части корпуса выполнены параллельно основным и в одной плоскости с ними дополнительные направляющие, механизм снабжен дополнительными промежуточным и ведомым звеньями и упором имеющим параллельный направляющим скос и закрепленным через упругий элемент на другом конце одного промежуточного звена, а другой конец другого промежуточного звена имеет такой же скос, взаимодействующий со скосом упора.
4. Механизм по пп. 1 и 3, отличающийся тем, что ведущее звено выполнено из двух жестко связанных частей, образующих внутреннюю полость, в которой размещены другие концы промежуточных звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый механизм | 1981 |
|
SU1028918A1 |
| Механизм для преобразования вращательного движения в винтовое или вращательное | 1986 |
|
SU1373924A1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ДЛИНЫ ХОДА ВЫХОДНОГО ЗВЕНА | 1992 |
|
RU2067234C1 |
| Эксцентриковый механизм | 1983 |
|
SU1100450A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Шарнир манипулятора | 1987 |
|
SU1733233A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И НАОБОРОТ | 2015 |
|
RU2610319C1 |
1. ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ, имеющий корпус с прямолинейными направляющими, размещенное в нем с возможностью вращения ведущее звенос ци.линдрическим отверстием, установленное в направляющих с возможностью возвратJ но-поступательного перемещения ведомое звено и размещенное подвижно вдоль оси в цилиндрическом отверстии промежуточное звено, щарнирно связанное одним концом с ведомым звеном при помощи пальца, ось которого пересечена с осью ведомого звена, отличающийся тем, что, с целью расширения функциональных возможностей, цилиндрическое отверстие расположено эксцентрично и параллельно оси вращения, корпус выполнен из двух раздельных частей, закрепленных на общей опорной плите, а направляющие выполнены в одной части корпуса и наклонены к оси вращения. в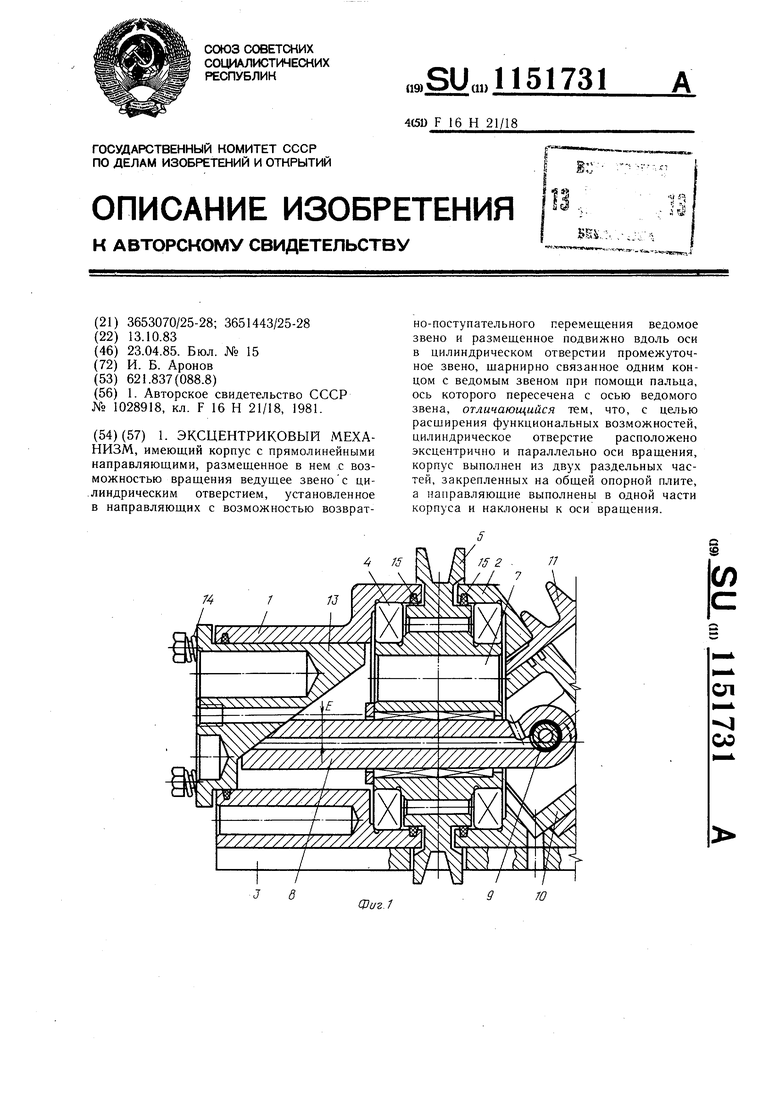
1
Изобретение относится к мащиностроению, а именно к эксцентриковым механизмам для преобразования вращательного движения в возвратно-поступательное, и может быть использовано, в частности, в двигателе в компрессоростроении.
Известен эксцентриковый механизм, содержащий корпус с прямолинейньши направляющими, размещенное в нем с возможностью вращения ведущее звено с цилиндрическим отверстием, движущееся в направляющих возвратно-поступательно ведомое звено, и размещенное подвижно в отверстии промежуточное звено, щарнирно связанное одним концом с ведомым звеном при помощи пальца, ось которого пересечена с осью ведомого звена.
В этом механизме цилиндрическое отверстие выполнено с наклоном к оси вращения ведущего звена, а направляющие ведомого звена параллельны этой оси 1.
Недостатком известного механизма является вращение ведомого и промежуточного звеньев вместе с ведущим звеном, что затрудняет использование этого механизма в поршневых мащинах.
Цель изобретения - исключение вращения ведомого и промежуточного звеньев путем изменения конструкции механизма.
Указанная цель достигается тем, что в эксцентриковом механизме, содержащем корпус с прямолинейными направляющими, размещенное в нем с возможностью вращения ведущее звено с цилиндрическим отверстием, установленное с возможностью возвратно-поступательного перемещения в направляющих ведомое звено и размещенное подвижно вдоль оси в цилиндрическом отверстии промежуточное звено, щарнирно связанное одним концом с ведомым звеном при помощи пальца, ось которого пересечена с осью ведомого звена, цилиндрическое отверстие расположено эксцентрично и
параллельно оси вращения, корпус выполнен из двух раздельных частей, закрепленных на общей опорной плите, а направляющие выполнены в одной части корпуса и наклонены к оси вращения.
Кроме того, механизм снабжен упором, имеющим параллельный направляющим скос и закрепленным на корпусе через упругий элемент, а другой конец промежуточного звена имеет такой же скос, взаимодействующий со скосом упора.
С целью повыщения надежности, механизм может быть двухсторонним, для чего в ведущем звене выполнено дополнительное цилиндрическое отверстие, симметричное основному, в другой части корпуса выполнены параллельно основным и в одной плоскости с ними дополнительные направляющие, а механизм снабжен дополнительными промежуточным и ведомым звеньями упором, имеющим параллельный направляющим скос и закрепленным через упругий элемент на другом конце одного промежуточного звена, а другой конец промежуточного звена имеет такой же скос, взаимодействующий со скосом упора.
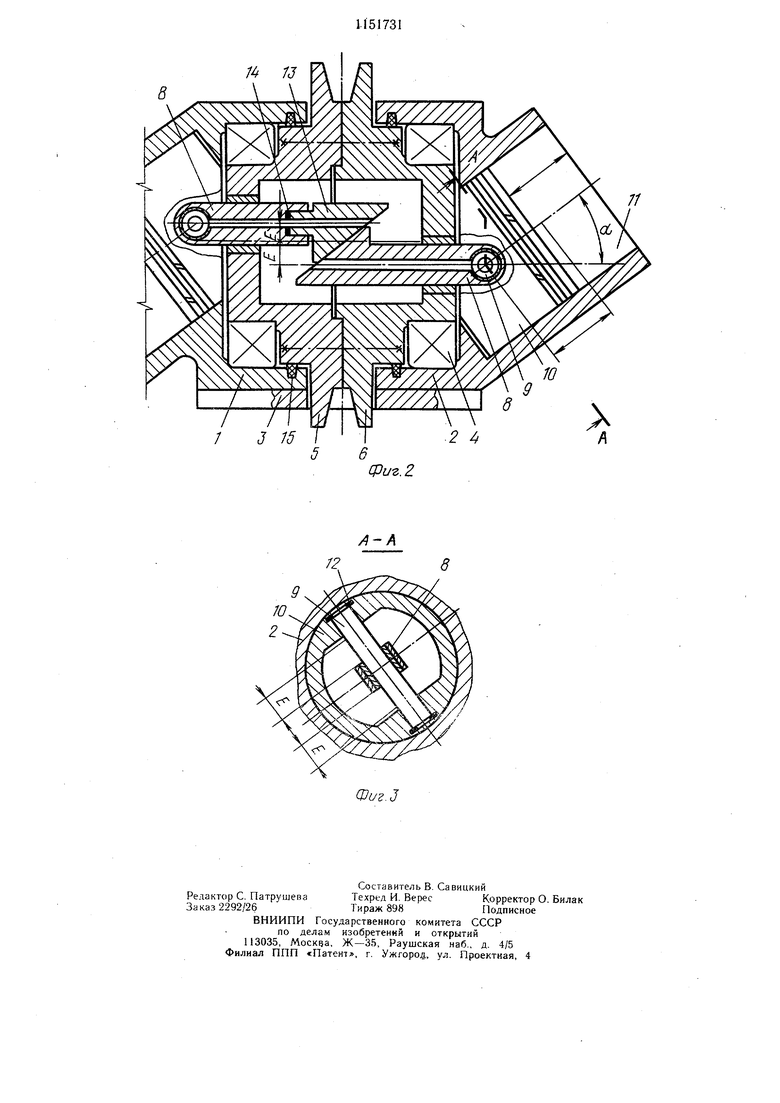
Кроме того, ведущее звено выполнено из двух жестко связанных частей, образующих внутреннюю полость, в которой размещены другие концы промежуточных звеньев. На фиг. 1 показан механизм с одним ведомым звеном; на фиг. 2 - механизм с двумя ведомыми звеньями; на фиг. 3 - сечение по щарниру, соединяющему промежуточное звено с ведомым.
Механизм содержит корпус, состоящий из двух раздельных частей 1 и 2, закрепленных на общей опорной плите 3. В частях I и 2 корпуса установлены подщипники 4, служащие опорами для ведущего звена, например, клиноременного щкива, выполненного из двух одинаковых частей 5 и 6, жестко связанных между собой. В
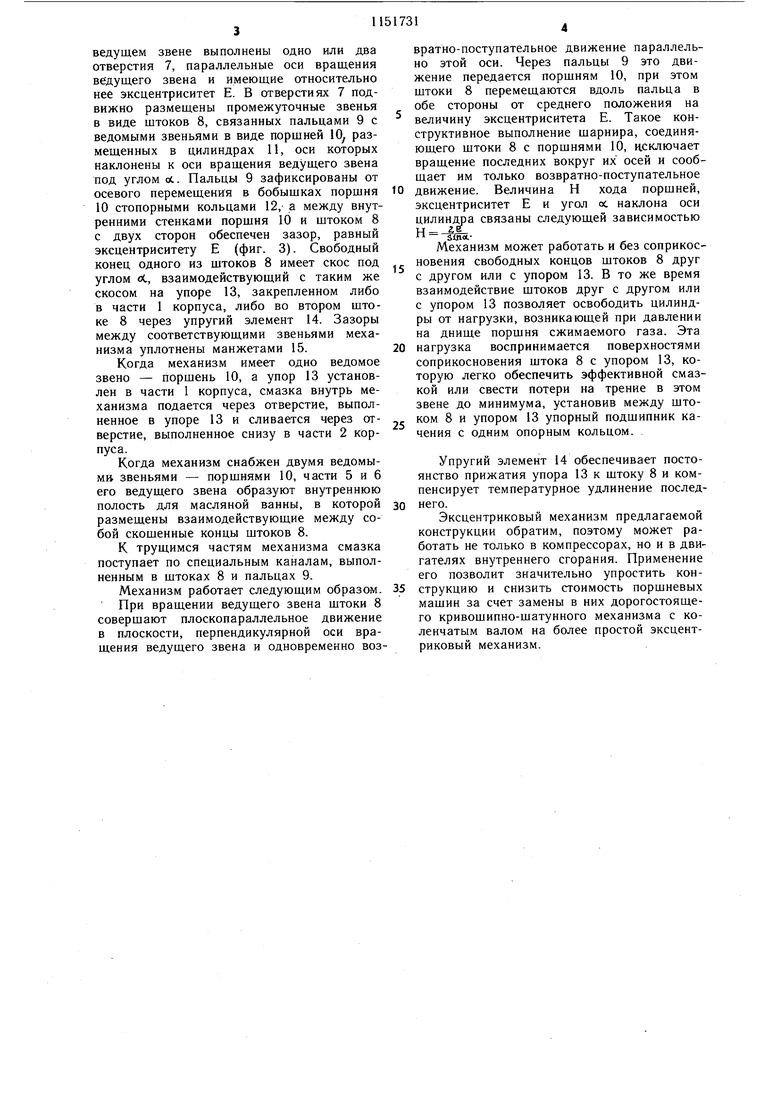
ведущем звене выполнены одно или два отверстия 7, параллельные оси вращения ведущего звена и имеющие относительно нее эксцентриситет Е. В отверстиях 7 подвижно размещены промежуточные звенья в виде щтоков 8, связанных пальцами 9 с ведомыми звеньями в виде поршней 10, размещенных в цилиндрах 11, оси которых наклонены к оси вращения ведущего звена под углом ot. Пальцы 9 зафиксированы от осевого перемещения в бобыщках поршня 10 стопорными кольцами 12, а между внутренними стенками порщня 10 и щтоком 8 с двух сторон обеспечен зазор, равный эксцентриситету Е (фиг. 3). Свободный конец одного из штоков 8 имеет скос под углом ot, взаимодействующий с таким же скосом на упоре 13, закрепленном либо в части 1 корпуса, либо во втором щтоке 8 через упругий элемент 14. Зазоры между соответствующими звеньями механизма уплотнены манжетами 15.
Когда механизм имеет одно ведомое звено - поршень 10, а упор 13 установлен в части 1 корпуса, смазка внутрь механизма подается через отверстие, выполненное в упоре 13 и сливается через отверстие, выполненное снизу в части 2 корпуса.
Когда механизм снабжен двумя ведомыми звеньями - порщнями 10, части 5 и 6 его ведущего звена образуют внутреннюю полость для масляной ванны, в которой размещены взаимодействующие между собой скошенные концы щтоков 8.
К трущимся частям механизма смазка поступает по специальным каналам, выполненным в штоках 8 и пальцах 9.
Механизм работает следующим образом.
При вращении ведущего звена щтоки 8 совершают плоскопараллельное движение в плоскости, перпендикулярной оси вращения ведущего звена и одновременно возвратно-поступательное движение параллельно этой оси. Через пальцы 9 это движение передается порщням 10, при этом щтоки 8 перемещаются вдоль пальца в обе стороны от среднего положения на величину эксцентриситета Е. Такое конструктивное выполнение щарнира, соединяющего штоки 8 с порщнями 10, исключает вращение последних вокруг их осей и сообщает им только возвратно-поступательное 0 движение. Величина Н хода поршней, эксцентриситет Е и угол ос наклона оси цилиндра связаны следующей зависимостью
H ffe.
Механизм может работать и без соприкосновения свободных концов щтоков 8 друг
5 с другом или с упором 13. в то же время взаимодействие штоков друг с другом или с упором 13 позволяет освободить цилиндры от нагрузки, возникающей при давлении на днище поршня сжимаемого газа. Эта
0 нагрузка воспринимается поверхностями соприкосновения щтока 8 с упором 13, которую легко обеспечить эффективной смазкой или свести потери на трение в этом звене до минимума, установив между щто, ком 8 и упором 13 упорный подщипник качения с одним опорным кольцом.
Упругий элемент 14 обеспечивает постоянство прижатия упора 13 к штоку 8 и компенсирует температурное удлинение послед0 иего.
Эксцентриковый механизм предлагаемой конструкции обратим, поэтому может работать не только в компрессорах, но и в двигателях внутреннего сгорания. Применение его позволит значительно упростить конструкцию и снизить стоимость порщневых мащин за счет замены в них дорогостоящего кривощипно-щатунного механизма с коленчатым валом на более простой эксцентриковый механизм.
f2
cpuz.2
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Эксцентриковый механизм | 1981 |
|
SU1028918A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
