(Л
00 00
со
анализирует значение углов датчиков 9 угла горизонтального разворота, формирует сигнал поиска и передает его через коммутатор на входной сумматор блока автопоиска, т.е. происходит Принудительньй срыв слежения и введение приемопередатчика в режим автопоиска; По значениям углов от датчиков 9 угла горизонтального разворота процессор 2 идентифицирует отражатели
с измеренными дальностями, что необходимо для .определения положения объекта-. По получении информации о расстояниях до отражателей и углов от дальномерных блоков и датчиков 9 угла горизонтального разворота, а также по известным координатам опорных пунктов, на которых установлены отражатели, процессор 2 определяет положение объекта. 3 з.п. ф-лы, 5 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат объекта | 1987 |
|
SU1538050A1 |
| Блок нормирования для измерителя с генератором накачки лазера и четырехплощадочным квадрантным фотоприемником | 1989 |
|
SU1695127A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| Устройство для определения координат объекта | 1989 |
|
SU1739197A2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| Устройство для измерения индикатрис рассеяния света | 1987 |
|
SU1481649A1 |
| ПРИЕМНИК ИМПУЛЬСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2511069C1 |
| Лазерный дальномер | 2017 |
|
RU2650851C1 |
| ПРИЕМНИК ИМПУЛЬСНЫХ ОПТИЧЕСКИХ СИГНАЛОВ | 2012 |
|
RU2506547C1 |
Изобретение относится к приборостроению. Цель изобретения - повышение точности и быстродействия определения положения объекта. Если в зону обзора лазера попадает отражатель, на выходе детектора блока 22 сравнению появляется напряжение, размыкающее ключ блока 23 автопоиска. Если оба приемопередатчика нашли один и тот же отражатель, процессор 2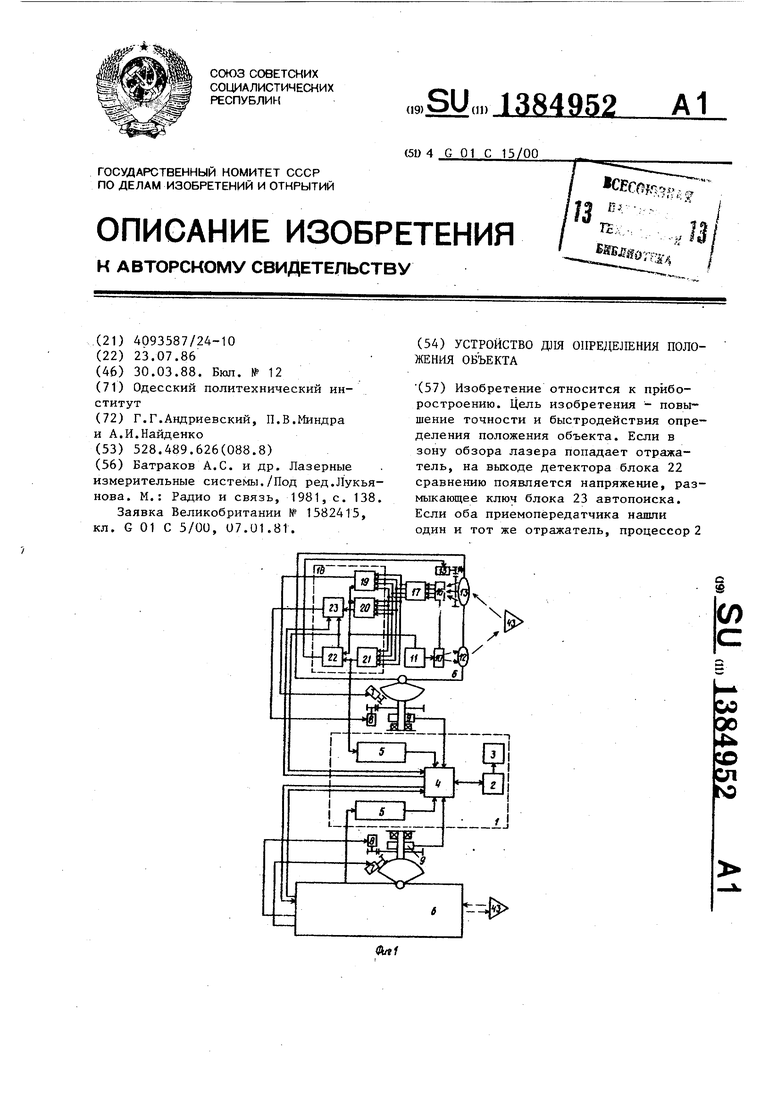
1
Изобретение относится к приборо- строению, в частности к устройствам для определения положения подвижных объектов.
Цель изобретения - повышение точности и быстродействия определения положения объекта.
.
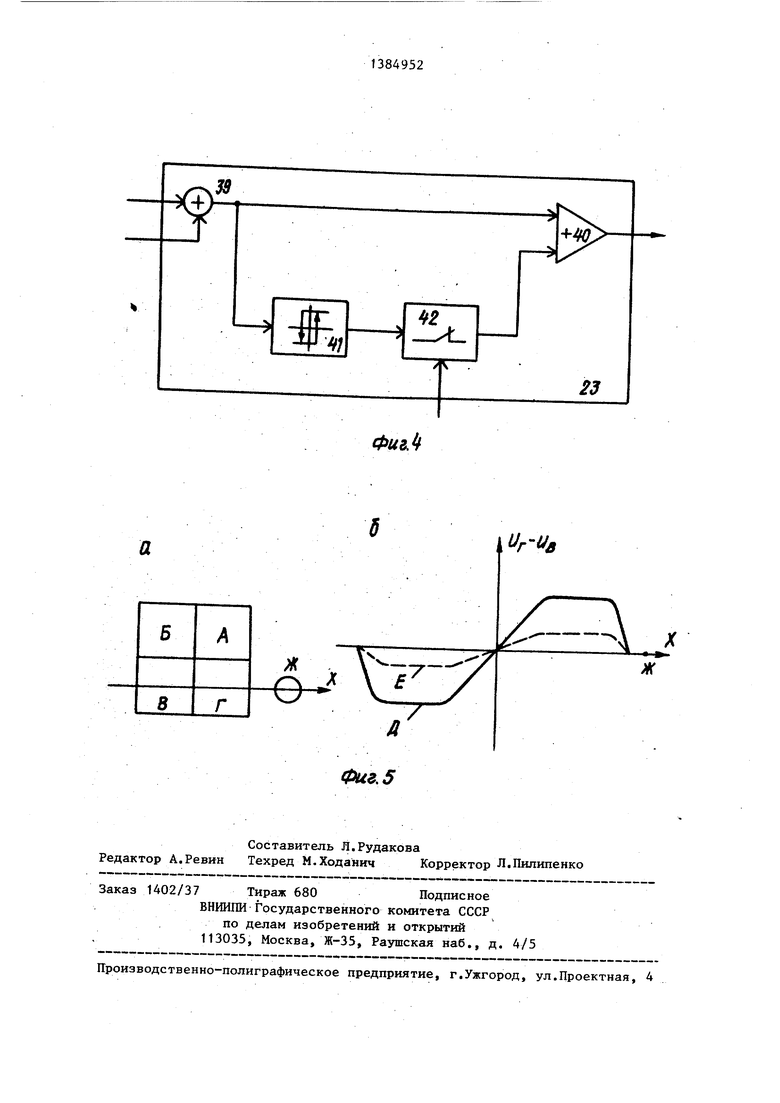
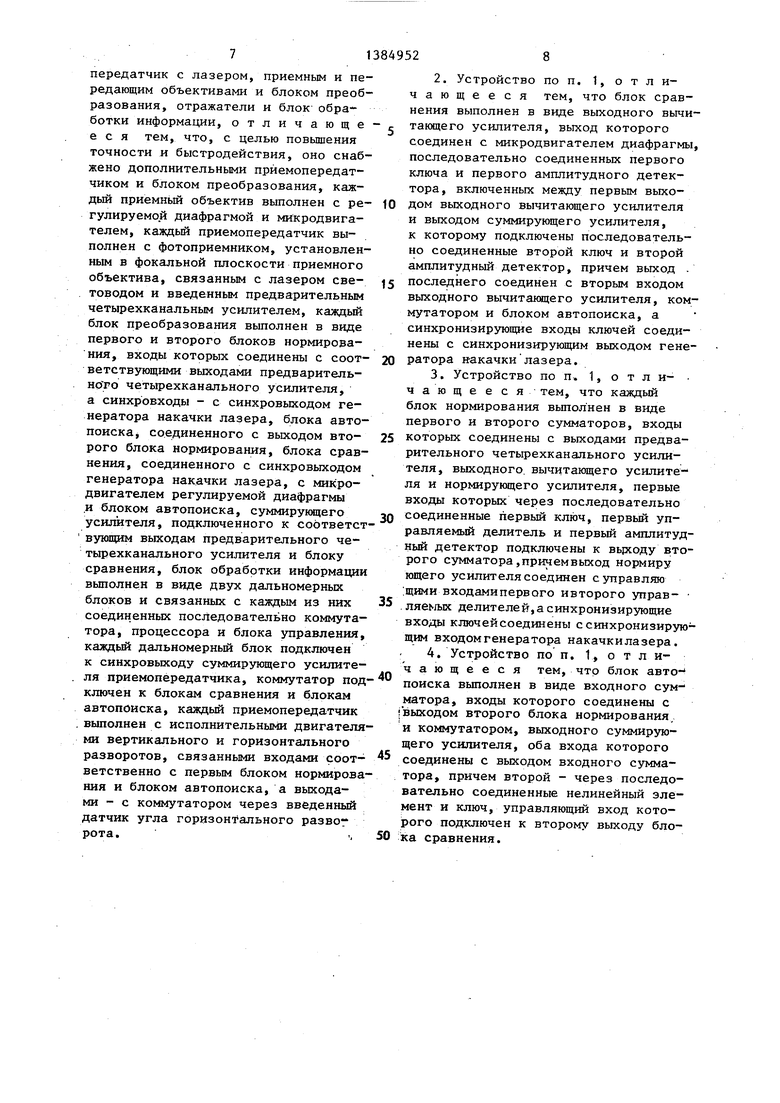
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - схема блока сравнения; на фиг.З - схема блока нормирования; на фиг. 4 - схема блока автопоиска; на фиг.5- схема, пояснякицая работу фотоприемника и его характеристики.
Устройство состоит из блока 1 об- работк, информации, процессора 2, блока управления, коммутатора 4, соединенных с ним дальномерных блоков 5, двух приемопередатчиков 6, каждый из которых оснащен исполнительными двигателями 7 и 8 соответственно вертикального и горизонтальног разворотов и датчиком 9 угла горизонтального разворота, связанным с коммутатором, каждый приемопередатчик состоит из лазера 10, генератора 11 накачки лазера, передающего объектива 12, приемного объектива 13, его регулируемой диафрагмы 14, микродвигателя 15 диафрагмы, фотоприемника 16 связанного с лазером, соединенного с фотоприемником предварительного че- тырехканального усилителя 17, блока 18 преобразования, состоящего из первого 19 и второго 20 блоков нормирования, входы которых параллельно соединены с выходами предварительного четырехканального усилителя, а синхровходы - с синхровыходом генера тора накачки лазера, из суммирующего
5 0
5
0
усилителя 21, входы которого соединены с предварительным четырехканаль- ным усилителем, а выход - с дальномер ным блоком, из блока 22 сравнения, первый выход которого соединен с микродвигателем диафрагмы, второй выход подключен к коммутатору 4, из блока 23 автопоиска, причем выход первого блока нормирования соединен с двигателем вертикального разворота, а выход BTQporo.блока нормирования соединен с двигателем горизонтального разворота через блок автопоиска, второй и третий входы которого соединены с коммутатором и вторым выходом блока сравнения.
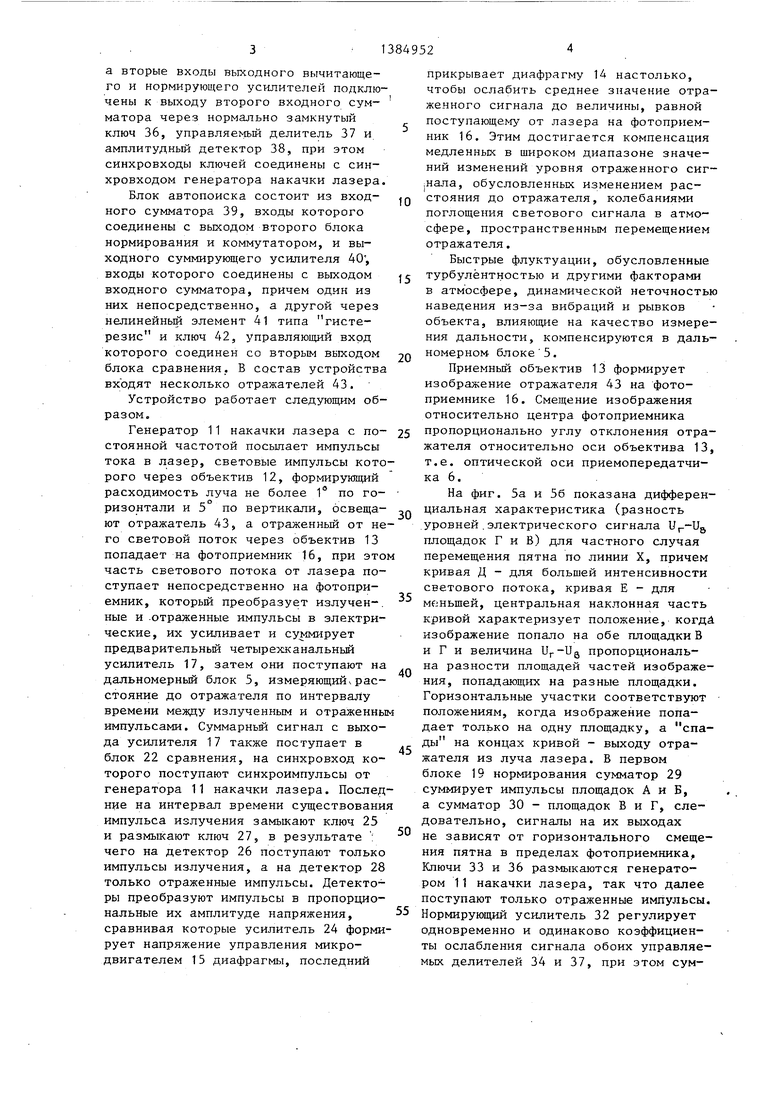
Блок сравнения состоит из выходного вычитающего усилителя 24, первый вход которого через последовательно соединенные нормально разомкнутый ключ 25 и амплитудный детектор 26 подключен к выходу суммирующего усилителя, к которому также подключены последовательно соединенные нормально замкнутый ключ 27 и амплитуд- ньй детектор 28, причем выход последнего соединен со вторым входом вычи- тающего усилителя, с коммутатором и третьим входом блока автопоиска.
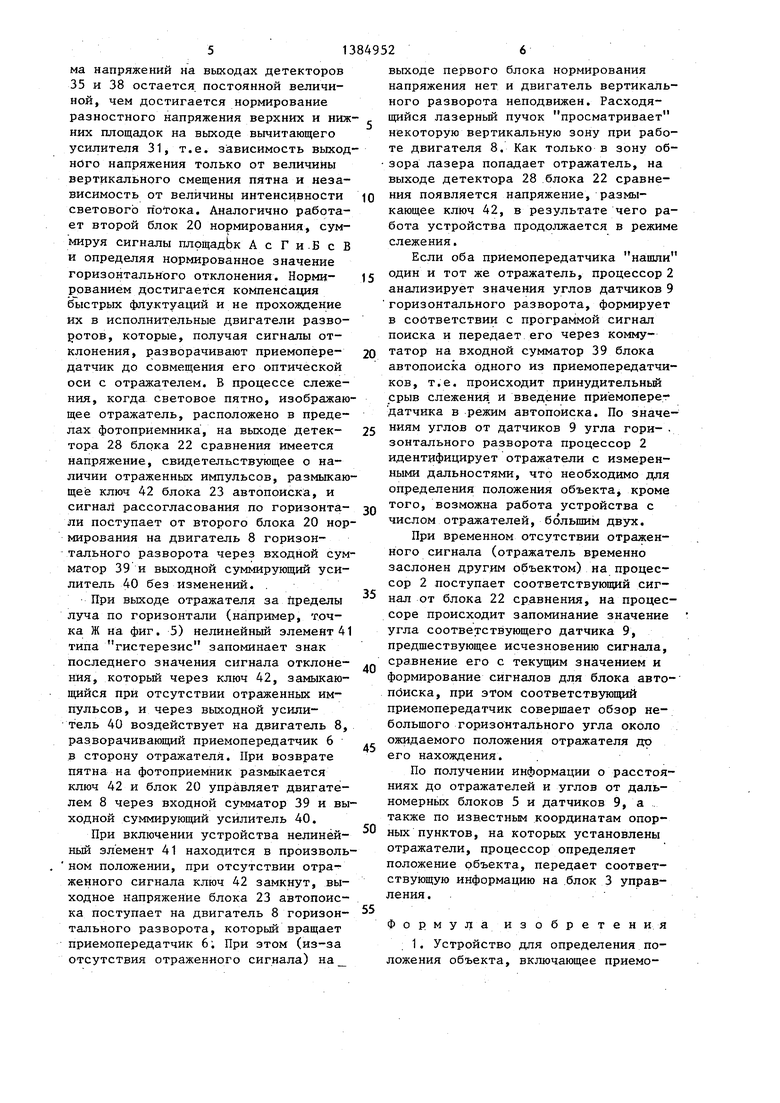
Каждьй блок нормирования состоит из входных сумматоров 29 и 30, входы которых подключены к предваритель- ному четырехканальному усилителю, выходного вычитающего усилителя 31 и нормирующего усилителя 32, первые входы которых через нормально замкнутый ключ 33, управляемьй делитель 34 и амплитудньй детектор 35 подключены .к выходу первого входного сумматора.
а вторые входы выходного вычитающего и нормирующего усилителен подключены к выходу рторого входного сум- матора через нормально замкнутый ключ 36, управляемьш делитель 37 и амплитудный детектор 38, при этом синхровходы ключей соединены с син- хровходом генератора накачки лазера.
Блок автопоиска состоит из входного сумматора 39, входы которого соединены с выходом второго блока нормирования и коммутатором, и выходного суммирующего усилителя 40, входы которого соединены с выходом входного сумматора, причем один из них непосредственно, а другой через нелинейный элемент 41 типа гистерезис и ключ 42, управляющий вход которого соединен со вторым ВБГХОДОМ блока сравнения. В состав устройства входят несколько отражателей 43.
Устройство работает следующим образом.
Генератор 11 накачки лазера с постоянной частотой посыпает импульсы тока в лазер, световые импульсы которого через объектрш 12, формирующий расходимость луча не более 1° по горизонтали и 5 по вертикали, освещают отражатель 43, а отраженный от него световой поток через объектив 13 попадает на фотоприемник 16, при это часть светового потока от лазера поступает непосредственно на фотоприемник, которьй преобразует излучен-, ные и -отраженные импульсы в электрические, их усиливает и суммирует предварительный четырехжанальный усилитель 17, затем они поступают на дальномерный блок 5, измеряющий.расстояние до отражателя по интервалу времени между излученным и отраженны импульсами. Суммарньй сигнал с выхода усилителя 17 также поступает в блок 22 сравнения, на синхровход которого поступают синхроимпульсы от генератора 11 накачки лазера. Последние на интервал времени существовани импульса излучения замыкают ключ 25 и размыкают ключ 27, в результате ; чего на детектор 26 поступают только импульсы излучения, а на детектор 28 только отраженные импульсы. Детекторы преобразуют импульсы в пропорциональные их амплитуде напряжения, сравнивая которые усилитель 24 формирует напряжение управления микродвигателем 15 диафрагмы, последний
0
5
0
5
0
5
0
5
прикрывает диафрагму 14 настолько, чтобы ослабить среднее значение отраженного сигнала до величины, равной поступающему от лазера на фотоприемник 16. Этим достигается компенсация медленных в широком диапазоне значений изменений уровня отраженного сиг- |Нала, обусловленных изменением расстояния до отражателя, колебаниями поглощения светового сигнала в атмосфере, пространственным перемещением отражателя.
Быстрые флуктуации, обусловленные турбулентностью и другими факторами в атмосфере, динамической неточностью наведения из-за вибраций и рывков объекта, влияющие на качество измерения дальности, компенсируются в даль- номерном блоке 5.
Приемный объектив 13 формирует изображение отражателя 43 на фотоприемнике 16. Смещение изображения относительно центра фотоприемника пропорционально углу отклонения отражателя относительно оси объектива 13, т.е. оптической оси приемопередатчика 6.
На фиг. 5а и 56 показана дифференциальная характеристика (разность уровней .электрического сигнала площадок Г и в) для частного случая перемещения пятна по линии X, причем кривая Д - для большей интенсивности светового потока, кривая Е - для меньшей, центральная наклонная часть кривой характеризует положение, когдй изображение попало на обе площадки В и Г и величина пропорциональна разности площадей частей изображения, попадающих на разные площадки. Горизонтальные участки соответствуют положениям, когда изображение попадает только на одну площадку, а спады на концах кривой - выходу отражателя из луча лазера. В первом блоке 19 нормирования сумматор 29 суммирует импульсы площадок А и Б, а сумматор 30 - площадок В и Г, следовательно, сигналы на их выходах не зависят от горизонтального смещения пятна в пределах фотоприемника, Ключи 33 и 36 размыкаются генератором 11 накачки лазера, так что далее поступают только отраженные импульсы. Нормирующий усилитель 32 регулирует одновременно и одинаково коэффициенты ослабления сигнала обоих управляемых делителей 34 и 37, при этом сумма напряжений на выходах детекторов 35 и 38 остается постоянной величиной, чем достигается нормирование разностного напряжения верхних и нижних площадок на выходе вычитающего усилителя 31, т.е. зависимость выходного напряжения только от величины вертикального смещения пятна и независимость от величины интенсивности светового п отока. Аналогично работает второй блок 20 нормирования, суммируя сигналы площадЬк А с Г и.Б с В и определяя нормированное значение горизонтального отклонения. Нормированием достигается компенсация быстрых флуктуации и не прохождение их в исполнительные двигатели разворотов, которые, получая сигналы отклонения, разворачивают приемопередатчик до совмещения его оптической оси с отражателем. В процессе слежения, когда световое пятно, изображающее отражатель, расположено в пределах фотоприемника, на выходе детектора 28 блока 22 сравнения имеется напряжение, свидетельствующее о наличии отраженных импульсов, размыкающее ключ 42 блока 23 автопоиска, и сигнал рассогласования по горизонтали поступает от второго блока 20 нормирования на двигатель 8 горизонтального разворота через входной сумматор 39 и выходной суммирующий усилитель 40 без изменений. .
При выходе отражателя за йределы луча по горизонтали (например, точка Ж на фиг. 5) нелинейный элемент 41 типа гистерезис запоминает знак последнего значения сигнала отклонения, который через ключ 42, замыкающийся при отсутствии отраженных импульсов, и через выходной усилитель 40 воздействует на двигатель 8, разворачивающий приемопередатчик 6 в сторону отражателя. При возврате пятна на фотоприемник размыкается ключ 42 и блок 20 управляет двигателем 8 через входной сумматор 39 и выходной суммирующий усилитель 40.
При включении устройства нелинёй- ньш элемент 41 находится в произволь- ном положении, при отсутствии отра- женного сигнала ключ 42 замкнут, выходное напряжение блока 23 автопоиска поступает на двигатель 8 горизонтального разворота, который вращает приемопередатчик 6; При этом (из-за отсутствия отраженного сигнала) на
13849526
выходе первогоблока нормирования напряжения нети двигатель вертикального разворотанеподвижен. Расходя10
15
20
25
30
35
40
45
50
55
щийся лазерный пучок просматривает некоторую вертикальную зону при работе двигателя 8. Как только в зону обзора лазера попадает отражатель, на выходе детектора 28 блока 22 сравнения появляется напряжение, размыкающее ключ 42, в результате чего работа устройства продолжается в режиме слежения.
Если оба приемопередатчика нашли один и тот же отражатель, процессор 2 анализирует значения углов датчиков 9 горизонтального разворота, формирует в соответствии с программой сигнал поиска и передает его через коммутатор на входной сумматор 39 блока автопоиска одного из приемопередатчиков, т.е. происходит принудительньй срыв слежения, и введение приёмоперег датчика в режим автопоиска. По значениям углов от датчиков 9 угла гори- . зонтального разворота процессор 2 идентифицирует отражатели с измеренными дальностями, что необходимо для определения положения объекта, кроме того, возможна работа устройства с числом отражателей, большим двух.
При временном отсутствии отраженного сигнала (отражатель временно заслонен другим объектом) на процессор 2 поступает соответствующий сигнал от блока 22 сравнения, на процессоре происходит запоминание значение угла соответствующего датчика 9, предшествующее исчезновению сигнала, сравнение его с текущим значением и формирование сигналов для блока авто- поиска, при этом соответствующий приемопередатчик совершает обзор небольшого горизонтального угла около ожидаемого положения отражателя до его нахождения.
По получении информации о расстояниях до отражателей и углов от даль- номерных блоков 5 и датчиков 9, а . также по известным координатам опорных пунктов, на которых установлены отражатели, процессор определяет положение объекта, передает соответствующую информацию на .блок 3 управления.
Формула изобретения
5
0
5
0
5
0
5
0
5
щийся лазерный пучок просматривает некоторую вертикальную зону при работе двигателя 8. Как только в зону обзора лазера попадает отражатель, на выходе детектора 28 блока 22 сравнения появляется напряжение, размыкающее ключ 42, в результате чего работа устройства продолжается в режиме слежения.
Если оба приемопередатчика нашли один и тот же отражатель, процессор 2 анализирует значения углов датчиков 9 горизонтального разворота, формирует в соответствии с программой сигнал поиска и передает его через коммутатор на входной сумматор 39 блока автопоиска одного из приемопередатчиков, т.е. происходит принудительньй срыв слежения, и введение приёмоперег датчика в режим автопоиска. По значениям углов от датчиков 9 угла гори- . зонтального разворота процессор 2 идентифицирует отражатели с измеренными дальностями, что необходимо для определения положения объекта, кроме того, возможна работа устройства с числом отражателей, большим двух.
При временном отсутствии отраженного сигнала (отражатель временно заслонен другим объектом) на процессор 2 поступает соответствующий сигнал от блока 22 сравнения, на процессоре происходит запоминание значение угла соответствующего датчика 9, предшествующее исчезновению сигнала, сравнение его с текущим значением и формирование сигналов для блока авто- поиска, при этом соответствующий приемопередатчик совершает обзор небольшого горизонтального угла около ожидаемого положения отражателя до его нахождения.
По получении информации о расстояниях до отражателей и углов от даль- номерных блоков 5 и датчиков 9, а . также по известным координатам опорных пунктов, на которых установлены отражатели, процессор определяет положение объекта, передает соответствующую информацию на .блок 3 управления.
Формула изобретения
10 дом выходного вычитающего усилителя и выходом суммирующего усилителя, к которому подключены последовательно соединенные второй ключ и второй амплитудный детектор, причем выход 15 последнего соединен с вторым входом выходного вычитающего усилителя, коммутатором и блоком автопоиска, а синхронизирующие входы ключей соединены с синхронизирующим выходом гене20 ратора н-акачки лазера.
25 которых соединены с выходами предварительного четырехканального усилителя, выходного, вычитающего усилите- ля и нормирующего усилителя, первые входы которых через последовательно
3Q соединенные первый ключ, первый управляемый делитель и первый амплитудный детектор подключены к вьрсоду второго сзт матора,причемвыход нормиру ющего усилителя соединен с управляю :щими входами первого ивторого управ-
5 ,ляемых делителей,асинхронизирзтощие входы ключейсоединены с синхронизирующим входомгенератора накачкилазера.
ВЫХОДОМ второго блока нормирования, и коммутатором, выходного суммирующего усилителя, оба входа которого соединены с выходом входного сумматора, причем второй - через последовательно соединенные нелинейный элемент и ключ, управляющий вход которого подключен к второму выходу бло- 50 ка сравнения.
40
45
Фи,г.2
Фиг.З
а
г
лТ
W V
е
Фиг.
S
ж
/
| Батраков А.С | |||
| и др | |||
| Лазерные измерительные системы./Под ред.Лукьянова | |||
| М.: Радио и связь, 1981, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| Заявка Великобритании № 1582415, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
