Изобретение относится к приборостроению, в частности к устройствам для определения положения подвижных объектов.
Цель изобретения - повышение точности и быстродействия определения объекта.
На фиг. 1 приведена структурная схема устройства для определения и коррекции траектории объекта} на фиг. 2 - схема блока наведения; на фиг. 3 схема блока стабилизации; на фиг. 4 схема генератора накачки ; на фиг. 5 пример конструктивного выполнения регулятора освещенности фотоприемника.
Устройство состоит из блока 1 обработки-информации, включающего последовательно соединенные измеритель 2 интервала времени, коммутатор 3, процессор k и накопитель 5 данных, а также радиоканал 6 передачи данных на объект, подключенный к процессору, приемопередатчик 7 оснащенного двигателями горизонтального 8 и вертикального 9 разворотов и датчиками горизонтального 10 и вертикального 11 положений, подключенными к коммутатору 3 и включающего импульсный лазер 12 с передающим объективом 13 и- генератором И накачки, приемный объектив 15 с четырехплощадочным квадрантным фотоприемником 16, подключенный к фотоприемнику 1б предварительный четырехканальный усилитель 17, основание 18 с закрепленным на нем биморфным элементом 19 первый отрезок гибкого световода 20, концы которого закреплены около фотоприемника 16 и на биморфном элементе 19 и второго отрезка гибкого световода 21, концы которого закреплены около лазера 12 и на основании 18, и из блока 22 преобразований, включающего блок горизонтального 23 и блок верти
5
0
5
0
5
0
5
0
5
кального 2k наведений, соединенные с предварительным усилителем 17 и двигателями 8 и 9, суммирующий усилитель 25, соединенный с предварительным усилителем 17 и измерителем 2 интервала времени, и блок 26 стабилизации, соединенный с суммирующим усилителем 25, биморфным элементом 19 и управляющим входом генератора 14 накачки, при этом синхровхо- ды блоков 23, 24 и 26 соединены с син- хровходом генератора 14 накачки.
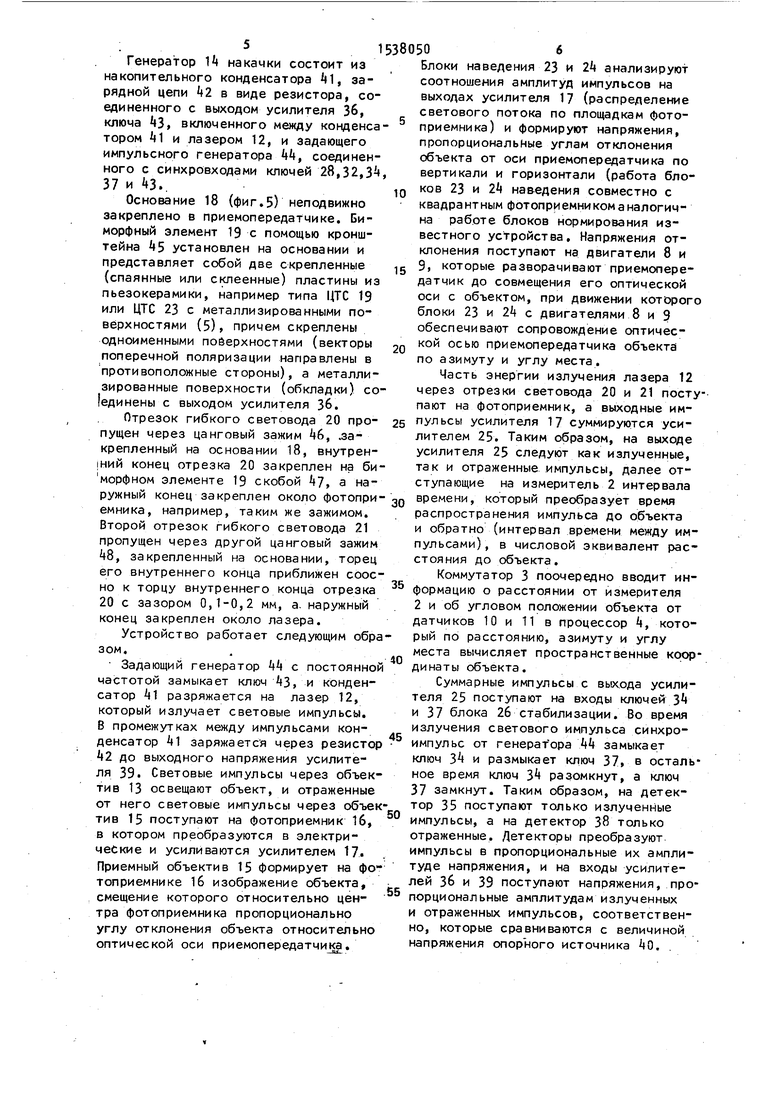
Каждый блок 23 и 2k наведения содержит последовательно соединенные первый входной сумматор 27, первый ключ 28, первый пиковый детектор 29 и выходной вычитающий усилитель 30, выход которого соединен с соответствующим двигателем разворота, и последовательно соединенные второй входной сумматор 31, второй ключ 32 и второй пиковый детектор 33, соединенный с другим входом усилителя 30, при этом входы сумматоров 27 и 31 соединены с соответствующими выходами усилителя 17, а синхровходы ключей 28 и 32 подключены к синхровыходу генератора 14 накачки.
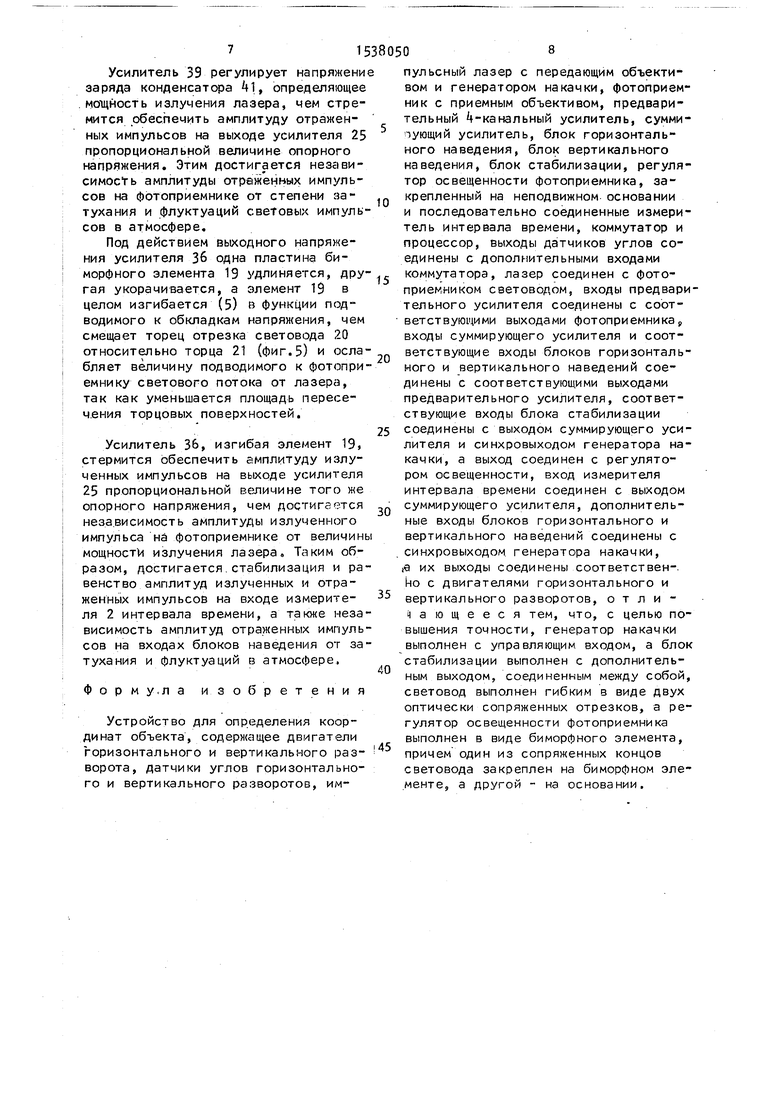
Блок 26 стабилизации содержит последовательно соединенные первый ключ 34, первый пиковый детектор 35 и первый вычитающий усилитель 36, выход которого соединен с биморфным элементом 19, последовательно соединенные второй ключ 37, второй пиковый детектор 38 и второй вычитающий усилитель 39, выход которого подключен к управляющему входу генератора 14 накачки, и источник 40 опорного напряжения, соединенный с другими входами усилителей 36 и 39, при этом входы ключей 34 и 37 соединены с выходом усилителя 25, а синхровходы ключей подключены к синхровходу генератора 14 накачки.
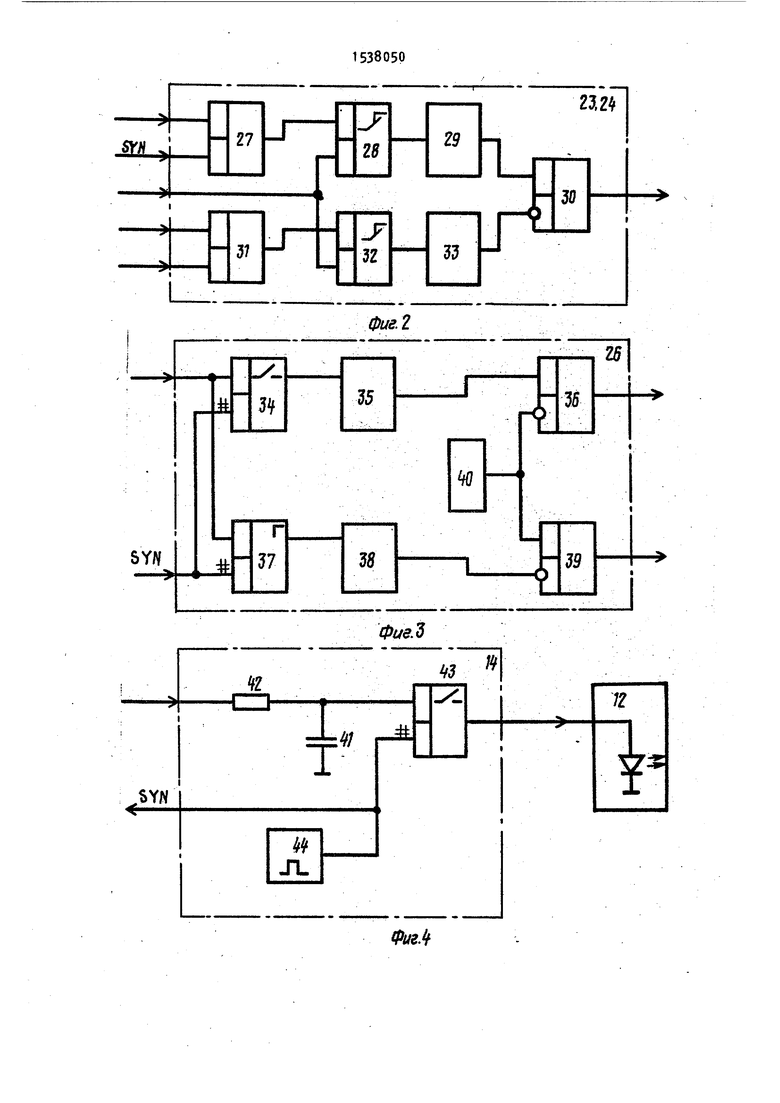
Генератор 1 накачки состоит из накопительного конденсатора 41, зарядной цепи 42 в виде резистора, соединенного с выходом усилителя 36,
1538050
Блоки наведения 23 и 2k анализируют соотношения амплитуд импульсов на выходах усилителя 17 (распределение светового потока по площадкам фотоключа 43, включенного между конденса- 5 приемника) и формируют напряжения,
тором 41 и лазером 12, и задающего импульсного генератора 44, соединенного с синхровходами ключей 28,32,34, 37 и 43.
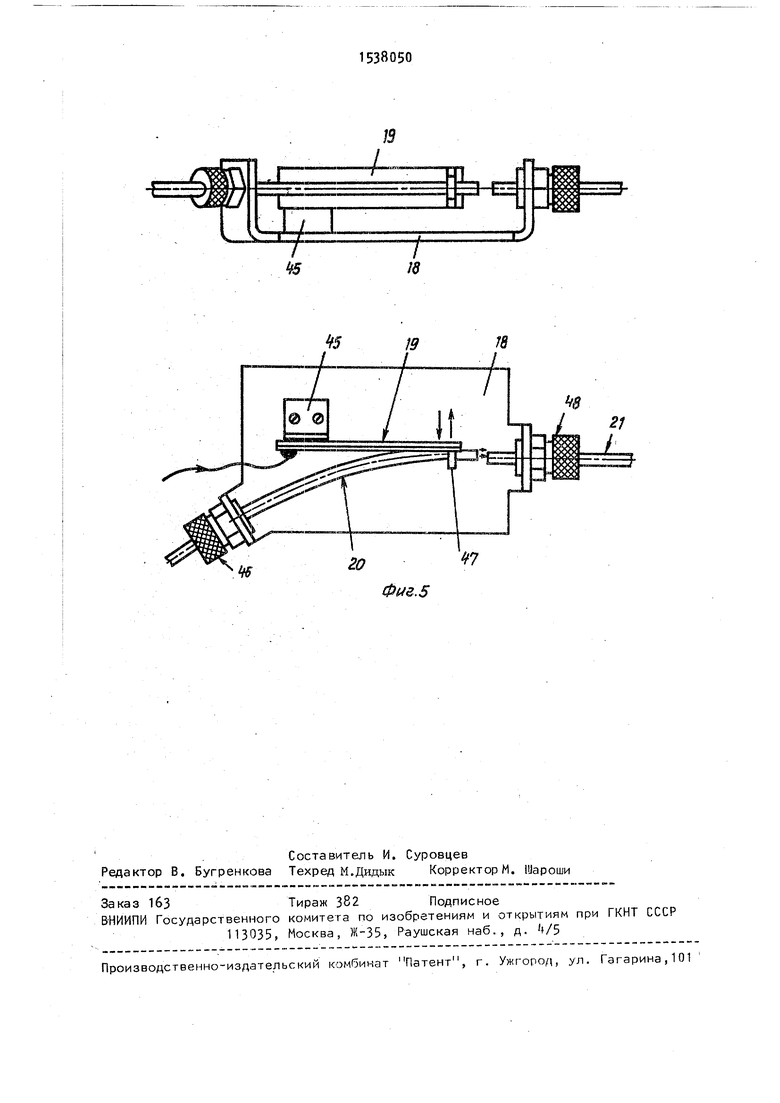
Основание 18 (фиг.5) неподвижно закреплено в приемопередатчике. Би- морфный элемент 19 с помощью кронштейна 45 установлен на основании и представляет собой две скрепленные (спаянные или склеенные) пластины из пьезокерамики, например типа ЦТС 19 или ЦТС 23 с металлизированными поверхностями (5), причем скреплены одноименными поверхностями (векторы поперечной поляризации направлены в противоположные стороны), а металлизированные поверхности (обкладки) со- (единены с выходом усилителя 36.
Отрезок гибкого световода 20 пропущен через цанговый зажим 46, .закрепленный на основании 18, внутренний конец отрезка 20 закреплен на би10
15
пропорциональные углам отклонения объекта от оси приемопередатчика по вертикали и горизонтали (работа блоков 23 и 24 на&едения совместно с квадрантным фотоприемником аналогична работе блоков нормирования известного устройства. Напряжения отклонения поступают на двигатели 8 и 9, которые разворачивают приемопередатчик до совмещения его оптической оси с объектом, при движении которого блоки 23 и 24 с двигателями 8 и 9 обеспечивают сопровождение оптической осью приемопередатчика объекта по азимуту и углу места.
Часть энергии излучения лазера 12 через отрезки световода 20 и 21 поступают на фотоприемник, а выходные им- 25 пульсы усилителя 17 суммируются усилителем 25. Таким образом, на выходе усилителя 25 следуют как излученные, так и отраженные импульсы, далее отступающие на измеритель 2 интервала
20
морфном элементе 19 скобой 47, а наружный конец закреплен около фотопри- -JQ времени, который преобразует время емника, например, таким же зажимом.распространения импульса до объекта
Второй отрезок гибкого световода 21и обратно (интервал времени между импропущен через другой цанговый зажимпульсами), в числовой эквивалент рас48, закрепленный на основании, торецстояния до объекта.
его внутреннего конца приближен соос-Коммутатор 3 поочередно вводит инно к торцу внутреннего конца отрезка 35 формацию о расстоянии от измерителя
2 и об угловом положении объекта от датчиков 10 и 11 в процессор 4, который по расстоянию, азимуту и углу места вычисляет пространственные коор20 с зазором 0,1-0,2 мм, а наружный конец закреплен около лазера.
Устройство работает следующим образом.
40
40
Задающий генератор 44 с постоянной частотой замыкает ключ 43, и конденсатор 41 разряжается на лазер 12, который излучает световые импульсы.
В промежутках между импульсами кон-денсатор 41 заряжается через резистор импульс от генерат ора 44 замыкает 42 до выходного напряжения усилите-ключ 34 и размыкает ключ 37, в осталь
динаты объекта.
Суммарные импульсы с выхода усилителя 25 поступают на входы ключей 34 и 37 блока 26 стабилизации. Во время излучения светового импульса синхроное время ключ 34 разомкнут, а ключ 37 замкнут. Таким образом, на детектор 35 поступают только излученные импульсы, а на детектор 38 только отраженные. Детекторы преобразуют импульсы в пропорциональные их амплитуде напряжения, и на входы усилителей 36 и 39 поступают напряжения, про порциональные амплитудам излученных и отраженных импульсов, соответственно, которые сравниваются с величиной напряжения опорного источника 40.
ля 39. Световые импульсы через объектив 13 освещают объект, и отраженные от него световые импульсы через объектив 15 поступают на фотоприемник 16, в котором преобразуются в электрические и усиливаются усилителем 17. Приемный объектив 15 формирует на фотоприемнике 16 изображение объекта, смещение которого относительно центра фотоприемника пропорционально углу отклонения объекта относительно оптической оси приемопередатчика.
1538050
Блоки наведения 23 и 2k анализируют соотношения амплитуд импульсов на выходах усилителя 17 (распределение светового потока по площадкам фотоа- 5 приемника) и формируют напряжения,
пропорциональные углам отклонения объекта от оси приемопередатчика по вертикали и горизонтали (работа блоков 23 и 24 на&едения совместно с квадрантным фотоприемником аналогична работе блоков нормирования известного устройства. Напряжения отклонения поступают на двигатели 8 и 9, которые разворачивают приемопередатчик до совмещения его оптической оси с объектом, при движении которого блоки 23 и 24 с двигателями 8 и 9 обеспечивают сопровождение оптической осью приемопередатчика объекта по азимуту и углу места.
Часть энергии излучения лазера 12 через отрезки световода 20 и 21 поступают на фотоприемник, а выходные им- пульсы усилителя 17 суммируются усилителем 25. Таким образом, на выходе усилителя 25 следуют как излученные, так и отраженные импульсы, далее отступающие на измеритель 2 интервала
времени, который преобразует время распространения импульса до объекта
2 и об угловом положении объекта от датчиков 10 и 11 в процессор 4, который по расстоянию, азимуту и углу места вычисляет пространственные коор
динаты объекта.
Суммарные импульсы с выхода усилителя 25 поступают на входы ключей 34 и 37 блока 26 стабилизации. Во время излучения светового импульса синхроимпульс от генерат ора 44 замыкает ключ 34 и размыкает ключ 37, в осталь
0
5
ное время ключ 34 разомкнут, а ключ 37 замкнут. Таким образом, на детектор 35 поступают только излученные импульсы, а на детектор 38 только отраженные. Детекторы преобразуют импульсы в пропорциональные их амплитуде напряжения, и на входы усилителей 36 и 39 поступают напряжения, пропорциональные амплитудам излученных и отраженных импульсов, соответственно, которые сравниваются с величиной напряжения опорного источника 40.
Усилитель 39 регулирует напряжение заряда конденсатора 1, определяющее мощность излучения лазера, чем стремится обеспечить амплитуду отраженных импульсов на выходе усилителя 25 пропорциональной величине опорного напряжения. Этим достигается независимость амплитуды отраженных импульсов на фотоприемнике от степени затухания и флуктуации световых импульсов в атмосфере.
Под действием выходного напряжения усилителя 36 одна пластина би- морфного элемента 19 удлиняется, дру- гая укорачивается, а элемент 19 в целом изгибается (5) в функции подводимого к обкладкам напряжения, чем смещает торец отрезка световода 20 относительно торца 21 (фиг.5) и ослабляет величину подводимого к фотоприемнику светового потока от лазера, так как уменьшается площадь пересечения торцовых поверхностей.
Усилитель 36, изгибая элемент 19, стермится обеспечить амплитуду излученных импульсов на выходе усилителя 25 пропорциональной величине того же опорного напряжения, чем достигается независимость амплитуды излученного импульса на фотоприемнике от величины мощности излучения лазера. Таким образом, постигается стабилизация и равенство амплитуд излученных и отраженных импульсов на входе измерите- ля 2 интервала времени, а также независимость амплитуд отраженных импульсов на входах блоков наведения от затухания и флуктуации в атмосфере.
Формула изобретения
Устройство для определения координат объекта, содержащее двигатели
горизонтального и вертикального раз ворота, датчики углов горизонтального и вертикального разворотов, им
10
20
1525
3Q 3540
45
пульсный лазер с передающим объективом и генератором накачки, фотоприемник с приемным объективом, предварительный -канальный усилитель, сумми- тующий усилитель, блок горизонтального наведения, блок вертикального наведения, блок стабилизации, регулятор освещенности фотоприемника, закрепленный на неподвижном основании и последовательно соединенные измеритель интервала времени, коммутатор и процессор, выходы датчиков углов соединены с дополнительными входами коммутатора, лазер соединен с фотоприемником световодом, входы предварительного усилителя соединены с соответствующими выходами фотоприемникаj, входы суммирующего усилителя и соответствующие входы блоков горизонтального и вертикального наведений соединены с соответствующими выходами предварительного усилителя, соответствующие входы блока стабилизации соединены с выходом суммирующего усилителя и синхровыходом генератора накачки, а выход соединен с регулятором освещенности, вход измерителя интервала времени соединен с выходом суммирующего усилителя, дополнительные входы блоков горизонтального и вертикального наведений соединены с синхровыходом генератора накачки, (9 их выходы соединены соответственно с двигателями горизонтального и вертикального разворотов, отличающееся тем, что, с целью повышения точности, генератор накачки выполнен с управляющим входом, а блок стабилизации выполнен с дополнительным выходом, соединенным между собой, световод выполнен гибким в виде двух оптически сопряженных отрезков, а регулятор освещенности фотоприемника выполнен в виде биморфного элемента, причем один из сопряженных концов световода закреплен на биморфном элементе, а другой - на основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения объекта | 1986 |
|
SU1384952A1 |
| Устройство для определения координат объекта | 1989 |
|
SU1739197A2 |
| ГОЛОГРАФИЧЕСКОЕ ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО | 1990 |
|
SU1813298A3 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| МНОГОКАНАЛЬНЫЙ ФОРМИРОВАТЕЛЬ ИЗЛУЧЕНИЯ ИНЖЕКЦИОННЫХ ПОЛУПРОВОДНИКОВЫХ ЛАЗЕРОВ | 1996 |
|
RU2112198C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| СВЕТОДАЛЬНОМЕР | 1998 |
|
RU2164005C2 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| Лазерный дальномер | 2017 |
|
RU2650851C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
Изобретение относится к приборостроению. Цель изобретения - повышение точности и быстродействия определения положения движущегося объекта. Если в зону обзора лазера 12 попадает движущийся объект, то на выходе блоков горизонтального 23 и вертикального наведений 24 появляется напряжение, пропорциональное смещению изображения объекта относительно центра фотоприемника, управляющее двигателями горизонтального 8 и вертикального разворотов 9, которые разворачивают принимающий объектив 15 в направлении объекта. Процессор 4 анализирует значение углов датчиков угла горизонтального 10 и вертикального разворотов 11. По значениям углов и измеренной дальности процессор 4 определяет положение объекта. Стабилизация амплитуд излучаемого и отраженного сигналов и обеспечение их равенства позволяют повысить точность и быстродействие определения положения объекта за счет исключения погрешностей измерений и временной задержки измерений, связанных с флуктуациями амплитуды излучения в атмосфере.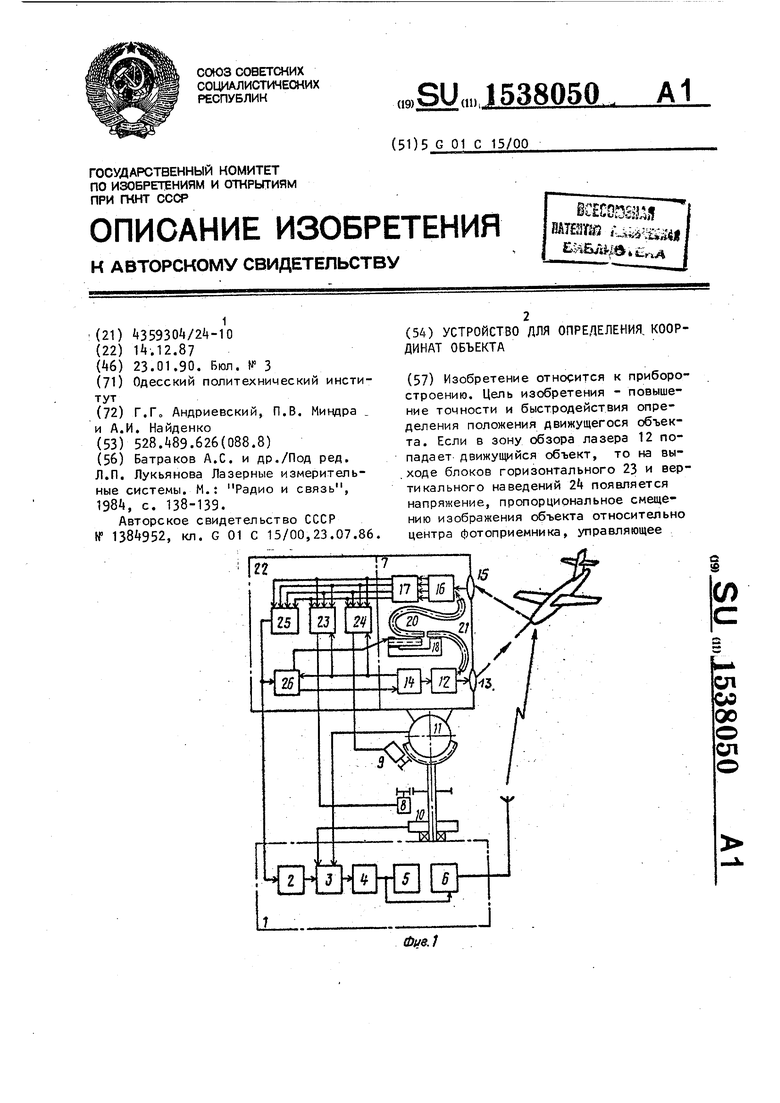
41
SYN
# SL
фиг. 2
ФиеЗ
W
12
й
Ь
18
21
го
47
Фиг. 5
| Батраков А.С | |||
| и др./Под ред | |||
| Л.П | |||
| Лукьянова Лазерные измерительные системы | |||
| М.: Радио и связь, 1984, с | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |
| Устройство для определения положения объекта | 1986 |
|
SU1384952A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
