(Л
00
00
ел to
05
ел
Изобретение относится к вычислительной технике и может быть использовано для фильтрации результатов измерений физического параметра.
Целью изобретения является повьпле- ние точности модифицированного фильтра Калмана при оценке, состояний динамического объекта, описьшаемого нели- иейной модельюi
На чертеже приведена структурная электрическая схема фильтра Калмана,
Фильтр Калмана содержит вычита- тель 1, первый умножитель 2, первый сумматор 3, интегратор 4, первьй синусный преобразователь 5, косинусный преобразователь 6, третий 7, четвертый 8, второй 9 и пятый 10 умножители, блок 11 памяти, делитель 12, второй сумматор 13, дополнительный
интегратор 14, восьмой 15, шестой 16 и седьмой 17 умножители, квадратор
18 и второй синусный преобразователь 19.
Фильтр Калмана работает следующим образом.
На вход фильтра Калмана поступает входной сигнал
z(t)y(t)+n(t),
(1)
где g
где y(t) - вектор измерений;
n(t) - погрешность измерений. При этом вектор измерений y(t) - нелинейная функция от g
y(t) t/(g); g f(g).
(2)
где g
- вектор состояния измерительной системы. Выходной сигнал фильтра Калмана определяе гся выражением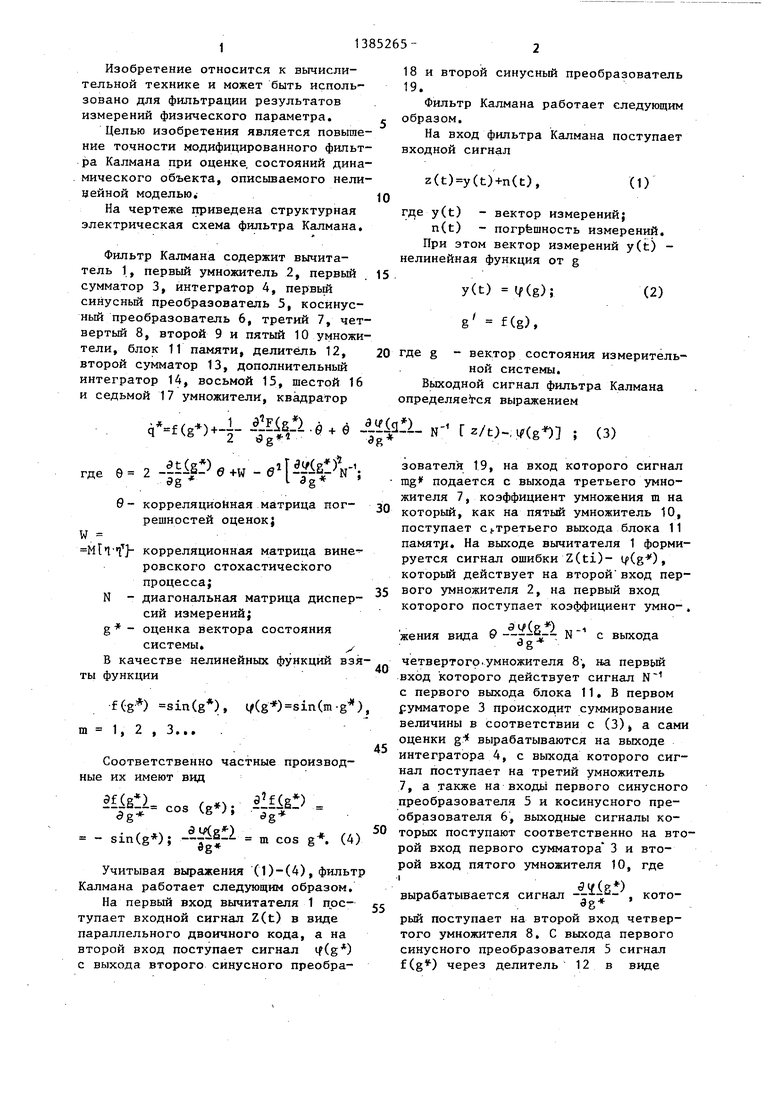

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| Цифровой фильтр | 1988 |
|
SU1555828A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2524034C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
Изобретение относится к вычислительной технике fe м.б. использовано для фильтрации результатов измерений физического параметра. Цель изобретения - повьппение точности модифицированного фильтра Калмана при оценке состояний динамического объекта, описываемого нелинейной моделью. Устр-во содержит вычитатель 1, умножители 2, 9, 7, сумматоры 3, 13, интегратор 4, делитель 12, квадратор 18. В устр-во введены два синусных преобразователя 5, 19, косинусный преобразователь 6, умножители 8, 10, . 16, 17, 15, блок памяти 11, дополнительный интегратор 14. Длительность импульсов входного кода такова, что быстродействие элементов не влияет на работоспособность фильтра Калмана. 1 ил.
(g)-f Ж - - N- f -/0-, if(g-) ; (3)
g
g
r«ee V-fil|- ««-.
0- корреляциоИная матрица погрешностей оценок; W
Mll- fj- корреляционная матрица вине- ровского стохастического процесса;
N - диагональная матрица дисперсий измерений;
g
)
оценка вектора состояния
системы, качестве нелинейных функций взяты функции
f(g) sin(g), m 1,2,3.,,
(/(g)sin(m-g),
Соответственно частные производные их имеют вид
) COS (P) ) .
ag- g
- sin(g); (
Учитывая выражения (l)-(4), фильтр Калмана работает следующим образом.
На первый вход вычитателя 1 поступает входной сигнал Z(t) в виде параллельного двоичного кода, а на второй вход поступает сигнал if(g) с выхода второго синусного преобра
зователя 19, на вход которого сигнал mg подается с выхода третьего умножителя 7, коэффициент умножения m на который, как на пятый умножитель 10, поступает с .третьего выхода блока 11 памят|1. На выходе вычитателя 1 формируется сигнал ошибки Z(ti)- М Св) который действует на второй вход первого умножителя 2, на первый вход которого поступает коэффициент умно- ,
„с выхода
0
5
0
5
жения вида - а в-
четвертого.умножителя В; на первьй вход которого действует сигнал с первого выхода блока 11, В первом румматоре 3 происходит суммирование величины в соответствии с (3) а сами оценки g: вырабатываются на выходе интегратора 4, с выхода которого сигнал поступает на третий умножитель 7, а также на входь первого синусного преобразователя 5 и косинусного преобразователя 6, выходные сигналы которых поступают соответственно на второй вход первого сумматора 3 и второй вход пятого умножителя 10, где
-31/(g)
вырабатывается сигнал , кото g
рый поступает на второй вход четвертого умножителя 8. С выхода первого синусного преобразователя 5 сигнал f(g) через делитель 12 в виде
- -sinCg) поступает на первый вход
рого в виде
вьпсода кото- - 9 постувторого умножителя 9, с
()
пает на инверсный вход первого сумматора 3, На второй вход второго умножителя 9, на вторые входы восьмого 15 и седьмого 17 умножителей и на третий вход четвертого умножителя 8 поступает сигнал в с выхода дополнительного интегратора 14,
Выход косинусного преобразователя 6 также подключен к первому входу седьмого умножителя 17, с выхода которого снимается сигнал вида f
в , действующий на второй
вход второго сумматора 13, на первый вход которого поступает значение W,
инверсный - С ( N с
а на
ag
выхода шестого умножителя 16, на второй вход которого действует сигнал с
квадратора 18 вида б -л 4-
На первый вход восьмого умножителя
аа(р)
15 поступает сигнал с выхода
пятого умножителя 10, Второй синусный преобразователь 19 обеспечивает формирование сигнала i/(g), действующего на вычитающий вход вычита- теля 1. Длительность импульсов вход- ного кода такова, что быстродействие элементов не влияет на работоспособность фильтра Калмана,
Таким образом, предлагаемый фильт Калмана обеспечивает получение оце- нок измерений при нелинейной модели исследуемой системы.
Фор. мула изобретения
Фильтр Калмана,содержащий вычита- тель, первый вход которого является входом фильтра Калмана, последователно соединенные первый умножитель, первый сумматор и интегратор, выход оторого является выходом фильтра
5
0
5
п
5
0
5
(3
Калмана, второй умножитель, выход которого соединен с инверсным входом первого сумматора, третий умножитель, вход которого соединен с выходом интегратора, второй сумматор, делитель и квадратор, отличающийся тем, что, с целью повьшения точности при оценке состояний динамического объекта, описываемого нелинейной моделью, введены первый и второй синусные преобразователи, косинусный преобразователь, дополнительньш интегратор, четвертый, пятый, шестой, седьмой и восьмой умножители и блок памяти, первый выход которого соединен с первыми входами четвертого и шестого умножителей, второй выход блока памяти соединен с первым входом второго сумматора, а третий выход блока памяти подключен к второму входу третьего умножителя и первому входу пятого умножителя, причем входы первого синусного и косинусного преобразователей подключены к выходу интегратора, выхой первого синусного преобразователя соединен с вторым входом первого сумматора, а с первым входом второго умножителя - через делитель, выход косинусного преобразователя соединен с вторым входом пятого, умножителя и первым входом - седьмого умножителя, выход которого соединен с вторым входом второго сумматора, а выход пятого умножителя соединен с вторым входом четвертого умножителя и первым входом восьмого умножителя, выход которого через квадратор подключен к второму входу шестого умножителя, выход которого соединен с инверсным входом второго сумматора, выход которого соединен через дополнительный интегратор с вторыми входами второго, седьмого и восьмого умножителей и третьим входом четвертого умножителя, выход которого подключен к первому входу первого умножителя, второй вход которого соединен с выходом вычитателя, второй вход которого соединен через второй синусный преобразователь с выходом третьего умножителя.
| Регуляризованный фильтр Калмана | 1983 |
|
SU1166275A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
