ел ел ел
00
to
00
Изобретение относится к вычислительной технике и может быть использовано для фильтрации результатов измерения физического параметра.
Цель изобретения - повышение точности фильтрации.
Поставленная цель достигается за счет использования при обработке априорно известного математического ожидания значения входного сигнала.
На чертеже приведена электрическая структурная схема цифрового фильтра.
Цифровой фильтр содержит вычита- тель 1, первый весовой множитель 2, первый сумматор 3, первый интегратор 4, первый синусный преобразбватель 5 третий весовой множитель 6, косинусный преобразователь 7, второй весо- вой множитель 8, второй синусный преобразователь 9, третий сумматор 10, третий синусный преобразователь 11, третий интегратор 12, блок 13 памяти второй сумматор 14, второй интегра- тор 15, четвертый весовой множитель 16 (делитель на два), пятый весовой множитель 17, четвертый синусный преобразователь 18, вось мой весовой множитель 19, второй дополнительный косинусный преобразователь 20, шестой весовой множитель 21, квадратор 22, седьмой весовой множитель 23, первый дополнительный косинусный преобразователь 24 и девятый весовой множитель 25.
Для получения алгоритма работы предлагаемого фильтра используется следующий математический аппарат.
Оцениваемый процесс нелинеен:
8 - f(g) ;
y(t) - f(g),(1)
где g - вектор состояния системы
размерности (); y.(t) - вектор наблюдений (измерений).
Измерения сопровождаются погрешностями n(t), которые аддитивны по отношению к y(t):
Z(t) - y(t) + n(t), (2)
где Z(t) - входной сигнал фильтра-. Выходной сигнал фильтра определяется выражением .
Эц(§) g f (g) +0 N jZ(t)- f(g)
3ZE(gw)
3751-
(3)
3f(gm)
-.
g 2 ---- 0 + W - 9 -x- N ,
3gm 3:g J
(4)
де 9 - корреляционная матрица погрешностей оценок;
W Мц|п корреляционная матрица ви- неровского стохастического процесса;
N - диагональная матрица дисперсий измерений;
g - оценка вектора состояния системы;
g - математическое ожидание вектора состояния системы, которое является решением уравнения
, s О 8m -f (8,.) +
(5)
В качестве нелинейных функций взяты f(g) sin(g), atf (g) sin(mg), т- 1,2,3.... Соответственно частные производные их имеют вид
Я&& « coS(g); -- - -Bin(g):
ЪИ&.ю.Ь).
9g
(6)
Учитывая выражения (1) - (4), цифровой фильтр работает следующим образом.
На первый вход вычитателя 1 поступает входной сигнал Z(t) в виде параллельного двоичного кода, а на второй вход - сигнал ср (g) с выхода второго синусного преобразователя 9, на вход которого сигнал mg подается с входа второго весового множителя 8, коэффициент умножения га на который, как и на весовые множители 6, 23 и 25, поступает с третьего выхода блока
13 памяти. На выходе вычитателя 1 формируется сигнал ошибки Z(t) - cp(g) , который действует на первый вход множиуеля 2, на четвертый вход которого поступает коэффициент умножения Ям с второго выхода блока 13 па51
мяти, а на третий вход - 0 с выхода второго интегратора 15.
В первом сумматоре 3 происходит суммирование величин в соответствии с (3), а сами оценки вырабатываются на выходе первого интегратора 4, с выхода которого сигнал поступает в весовой множитель 8 и первый синусный преобразователь 5, в котором вырабатывается сигнал f(g ) в соответствии с (6), поступающий на второй вход первого сумматора 3. Б цепочке весовой множитель 8, косинусный преобразователь 7, весовой мио-
1Ы&
э-й
житель 6 вырабатывается сигнал
0
в соответствии (6), поступающий на второй вход весового множителя 2. В третьем и четвертом синусных преобразователях 11 и 18, весовом множителе 17, третьем сумматоре 10 и интеграторе 12 вычисляется текущее значение математического ожидания вектора состояния системы в соответствии с (5), начальное значение которого поступает с четвертого выхода блока 13 памяти. С выхода весового
(gml
множителя 17 составляющая
38
через делитель на два (весовой множитель 16) поступает на третий вход первого сумматора 3. Во вторых сумматоре 14, интеграторе 15, весовых множителях 19 и 21 вычисляется текущее значение 0 в соответствии с (4), которое с выхода второго интегратора 15 поступает на первые входы весовых множителей 17, 19, 23 и третий вход весового множителя 2 соответственно. Второй дополнительный косинусный преобразователь 20 обеспечивает форми3f(sm)
рование сигнала -л- ogm вии с (6), действующего на
вход весового множителя почке весовой множитель 25, первый дополнительный косинусный преобразователь 24, весовой множитель 23, квадратор 22 вырабатывается сигнал г 3q(gni)P
вход весового множителя 21, на второй вход которого поступает коэффициент умножения N . Выход весового множив соответстпервый19, а в цевпоступающий на первый
теля 21 подключен к инверсному входу второго сумматора 14, на второй вход которого поступает значение W с первого выхода блока 13, а на первый
с
вход-сигнал 2SfCgJ
Эв
0 с выхода весо0
m
вого множителя 19. Во втором интеграторе 15 вычисляется значение 9 в соответствии с (4).
Длительность импульсов входного кода такова, что быстродействие элементов не влияет на работоспособность устройства.
Таким образом, предлагаемый цифровой фильтр позволяет повысить точность оценок измерений за счет учета при обработке априорно известного математического ожидания.
Формула изобретения
25
35
40
50
55
30
Цифровой фильтр, содержащий последовательно соединенные вычитатель, первые весовой множитель, сумматор и интегратор, выход которого является выходом цифрового фильтра, входом которого является первый вход вычи- тателя, первый синусный преобразователь, выход которого соединен с вторым входом первого сумматора, последовательно соединенные второй весовой множитель и синусный преобразователь, выход которого подключен к второму входу вычитателя, последовательно соединенные косинусный преобразователь и третий весовый множитель, выход которого соединен с вторым входом первого весового множителя, пятый весовой множитель, четвертый весовой множитель, вторые сумматор и интегратор, последовательно соеди- 45 ненные седьмой весовой множитель,
квадратор и шестой весовой множитель, выход которого соединен с инверсным входом второго сумматора, восьмой весовой множитель, выход которого соединен с первым входом второго сумматора, выход которого соединен через второй интегратор с третьим входом первого весового множителя и первыми входами пятого, седьмого и восьмого весовых множителей, и блок памяти, первый выход которого соединен с вторым входом второго сумматора, второй выход - с четвертым входом первого и вторым входом шестого весовых множителей, а третий выход подключен к второму входу третьего весового множителя и первому входу второго весового множителя, второй вход которого соединен с входом первого синусного преобразователя и выходом первого интегратора, отличающийся тем, что, с целью повышения точности фильтрации, вве- дьпы последовательно соединенные третьи синусный преобразователь, сумматор, интегратор, девятый весовой множитель и первый дополнительнын косинусный преобразователь, выход которого соединен с вторым входом седьмого весового множителя, а также четвертый синусный и второй дополнительный косинусный преобразователи входы которых соединены с входом N
третьего синусного преобразователя и выходом третьего интегратора, выход второго дополнительного косинусного преобразователя подключен к второму входу восьмого весового множителя, а выход четвертого синусного преобразователя соединен с вторым входом пятого весового множителя, выход которбго соединен с вторым входом третьего сумматора и через четвертый весовой множитель с третьим входом первого сумматора, причем вход косинусного преобразователя соединен с выходом второго, весового множителя, а вторые входы седьмого и девятого весовых множителей соединены с третьим выходом блока памяти, четвертый выход которого подключен к второму входу третьего интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| Анализатор спектра сигналов | 1986 |
|
SU1399765A1 |
| Вычислитель угла атаки | 1982 |
|
SU1072069A1 |
| Функциональный преобразователь | 1986 |
|
SU1456951A1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
Изобретение относится к вычислительной технике и может быть использовано для фильтрации результатов измерения физического параметра. Цель изобретения - повышение точности фильтрации путем учета при обработке априорно известного математического ожидания - достигается введением сумматора 10, синусных преобразователей 11, 18, интегратора 12, двух дополнительных косинусных преобразователей 24, 20 и весового множителя 25. 1 ил.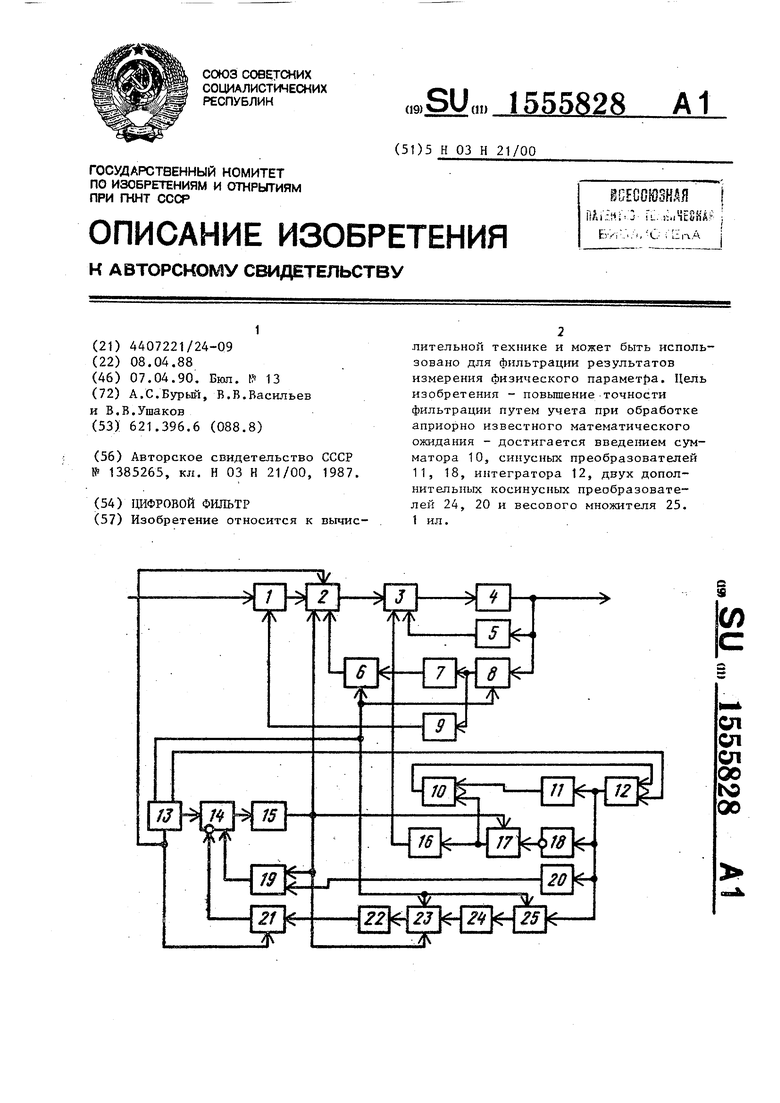
| Фильтр Калмана | 1987 |
|
SU1385265A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
