со
00 О5 00 Од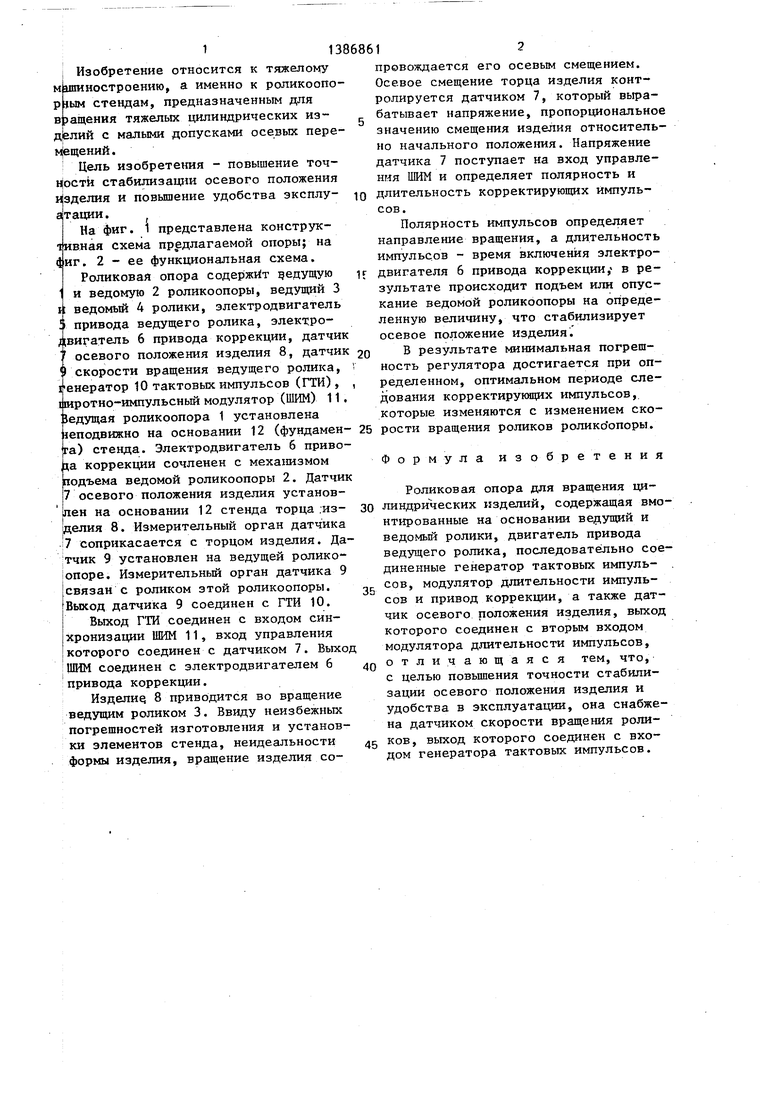
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для сварки толстостенных обечаек | 1985 |
|
SU1313617A1 |
| Роликовый стенд для вращения цилиндрических изделий при сборке и сварке | 1981 |
|
SU1031707A1 |
| Стенд для сборки и вращения цилиндрических изделий при сварке | 1984 |
|
SU1247219A1 |
| Роликовый стенд для сборки и сварки цилиндрических изделий | 1981 |
|
SU1031706A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ИМПУЛЬСОВ | 1995 |
|
RU2098918C1 |
| ДВУХТАКТНЫЙ ФАЗОИМПУЛЬСНЫЙ МОДУЛЯТОР | 1991 |
|
RU2013859C1 |
| Широтно-импульсный модулятор | 1990 |
|
SU1721815A1 |
| Вращатель цилиндрических изделий при сварке | 1987 |
|
SU1489959A1 |
| Система управления топливным насосом двигателя внутреннего сгорания | 1990 |
|
SU1809153A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСМИССИИ | 1991 |
|
RU2113698C1 |
Изобретение относится к тяжелому машиностроению и предназначено для вра1це1шя цилиндрических изделий с ма« лыми осевыми перемещениями. Цель - повышение точности стабилизации осевого положения изделия и удобства эксплуатации. При вращении изделия 8 с помощью ведущих роликов 3 от двигателя 5 ось вращения изделия 8 поворачивают вокруг перпендикулярной ей оси с помощью вертикального перемещения ведомых роликов 4. Последние перемещаются от последовательно соединенных датчика 9 скорости вращения роликов, генератора тактовых импульсов, модулятора длительности импульсов и привода коррекции 6, Этот привод получает также корректирующий сигнал от датчика 7 осевого положения изделия через модулятор. 2 ил. (Л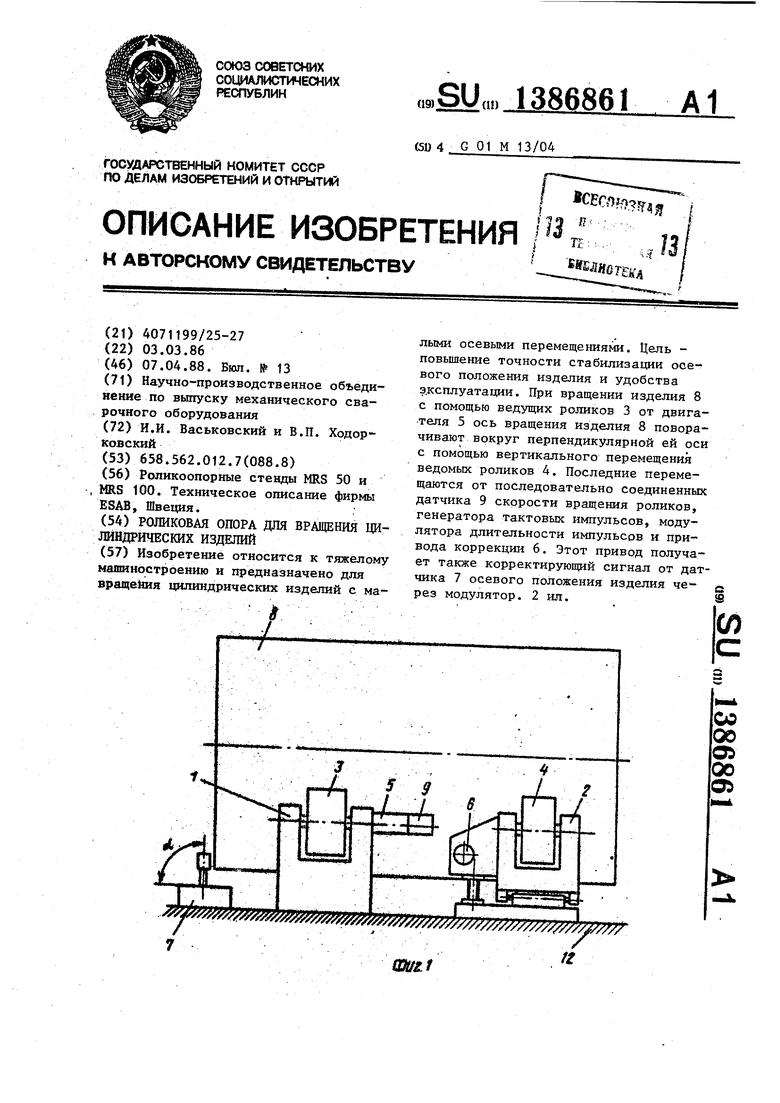
Шкг/
113868612
i Изобретение относится к тушеломупровождается его осевым смещением,
машиностроению, а именно к роликоопо-Осевое смещение торца изделия конт
риым стендам, предназначенным дляролируется датчиком 7, который выравращения тяжелых цилиндрических из-батывает напряжение, пропорциональное
делай с малыми допусками осевых пере-значению смещения изделия относительЦещений.но начального положения. Напряжение
: Цель изобретения - повышение точ-датчика 7 поступает на вход управлеЦостй стабилизации осевого положенияния ШИМ и определяет полярность и
изделия и повышение удобства эксплу- IQдлительность корректирующих ймпульг тации. сов.
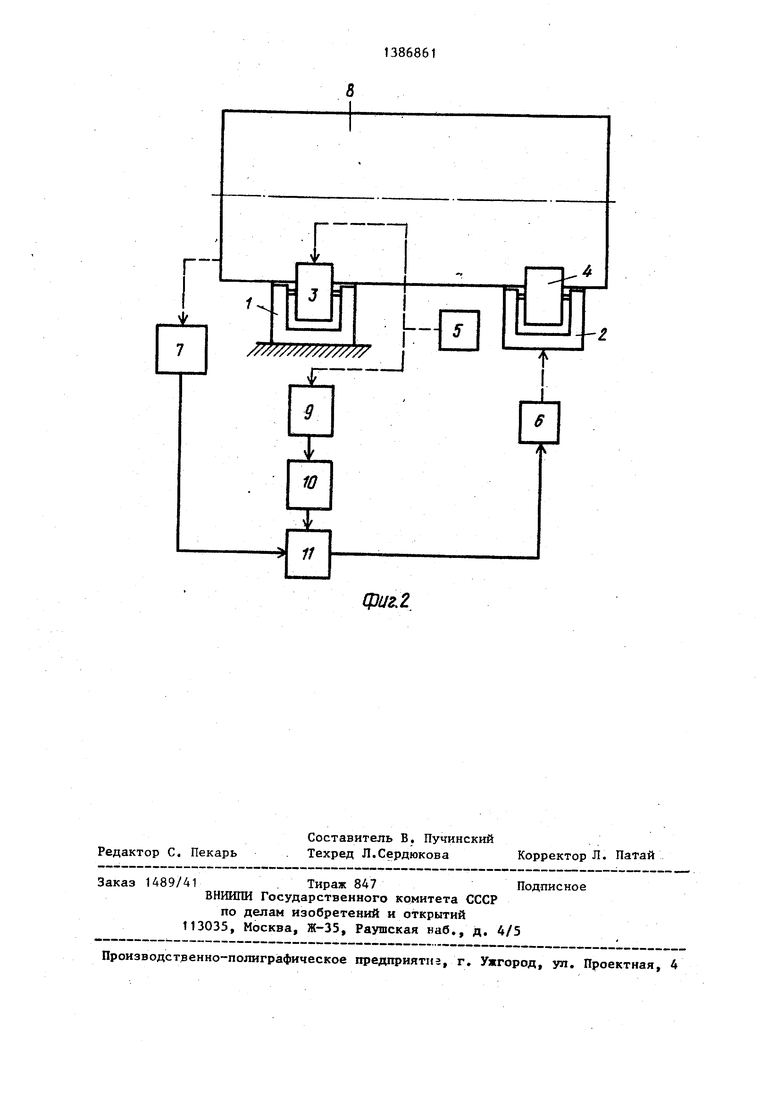
На фиг. 1 представлена конструк- Полярность импульсов определяет тЫвная схема предлагаемой опоры; нанаправление вращения, а длительность фиг. 2 - ее функциональная схема.импульсов - время включения электро- Роликовая опора содержит :5едУЩУЮ Uдвигателя 6 привода коррекции, в ре- и ведомую 2 роликоопоры, ведущий 3зультате происходит подъем или опус- ведомый 4 ролики, электродвигателькание ведомой роликоопоры на опредепривода ведущего ролика, элект;ро- ленную величину, что стабилизирует
fl вигaтeль 6 привода коррекции, датчикосевое положение изделия.
осевого положения изделия 8, датчик2о В результате минимальная погреш- ( скорости вращения ведущего ролика, v ность регулятора достигается при оп- 1 енератор 10 тактовых импульсов (ГТИ) , , ределенном, оптимальном периоде сле- iMpoTHo-импульсный модулятор (ШИМ) 11.дования корректирующих импульсов, ведущая роликоопора 1 установленакоторые изменяются с изменением ско- еподвижно на основании 12 (фундамен-25 рости вращения роликов ролико опоры. га) стенда. Электродвигатель 6 привода коррекции сочленен с механизмомФормула изобретения подъема ведомой роликоопоры 2. Датчик
7 осевого положения изделия установ-Роликовая опора для вращения ципен на основании 12 стенда торца .из-30 линдрических изделий, содержащая вмоделия 8. Измерительный орган датчикантированные на основании ведущий и i7 соприкасается с торцом изделия. Да- ведомый ролики, двигатель привода
|тчик 9 установлен на ведущей ролико-ведущего ролика, последовательно соеionope. Измерительный орган датчика 9диненные генератор тактовых импуль- .
связан с роликом этой роликоопоры. сов, модулятор длительности импульВыход датчика 9 соединен с ГТИ 10.сов и привод коррекции, а также датВыход ГТИ соединен с входом син-чик осевого положения изделия, выход
хронизации ШИМ 11, вход управлениякоторого соединен с вторым входом которого соединен с датчиком 7. Выход модулятора длительности импульсов,
ШИМ соединен с электродвигателем о т л и ч а ю щ а я с я тем, что,
привода коррекции.с целью повьшения точности стабилиИздели 8 приводится во вращениезации осевого положения изделия и ведущим роликом 3. Ввиду неизбежныхудобства в эксплуатации, она снабже- погрешностей изготовления и установ-на датчиком скорости вращения ролики элементов стенда, неидеальности 5 ков, выход которого соединен с вхо- формы изделия, вращение изделия со-дом генератора тактовыя: импульсов.
////W///y//////// j
r- j
t L
Фиг.2.
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Техническое описание фирмы ESAB, Швеция. | |||
