Известны -конта.ктные датчики для управления исполнительными механизмами в системах автоматического регулирования, например, положения передвигающейся сетки или сукна бумагоделательной машины или других передвигающихся материалов -и изделий.
Однако эти датчики имеют сложную конструкцию.
Отличительной особенностью .предложенного контактного датчика является то, что он выполнен в виде индуктивного тензометра, якорь которого через систему рычагов и верти кально установленную пластину с грузом взаимодействует с сеткой при смещении ее от нормального положения. Индуктируемый при этом взаимодействии в тензометре электрический сигнал воздействует на исполнительный механизм, возвращающий отклоненную сетку в нормальное положение.
Такая конструкция датчика проще чем ранее известные и расщиряет область его применения.
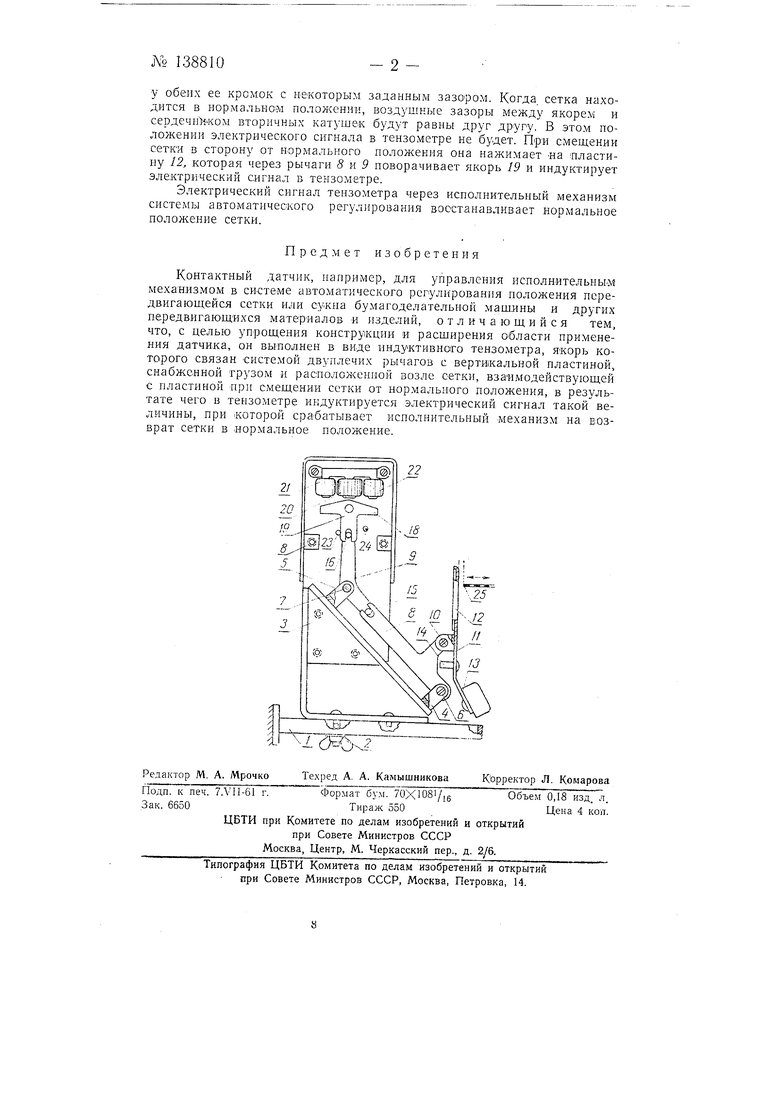
ria чертеже схематически изображен контактный датчик.
Иа неподвижном кронщтейне / гайкой 2 закреплен корпус 3 датчика, положение которого может регулироваться.
В ироущинах 4 м 5 «орпуса щарнирно закреплены на осях 5 и 7 двуплечие рычаги S и 5. На одном из плеч рычага 8 на оси 10 установлен двуплечий рычаг 11, одно .плечо которого выполнено в виде пластины 12, а второе несет на себе противовес 13 и упор 14, взаимодействующий с рычагом 8. Второе плечо рычага 8 выполнено в виде вилки, сочлененной с пальцем 15 рычага 9, который посредством пальца 16 взаимодействует с вилкой 18 поводка якоря 19 тензометра.
Тензометр включает в себя монтированные на Т-образном сердечнике первичную катущку 20 и две вторичных .катушки 21 и 22, включенных навстречу друг другу, а также якорь 19, поворот которого ограничивается упорами 23 и 24. При регулировке положения передвигающейся сетки 25 бумагоделательной мащины датчики устанавливаются