х ч|
Изобретение относится к сельскому хозяйству и может быть использовано для автоматического управления движением широкозахватных дождевальных машин (ШДМ) фронтального действия с гидравлическим приводом опорных тележек.
Целью изобретения является повышение производительности машины и равномерности полива.
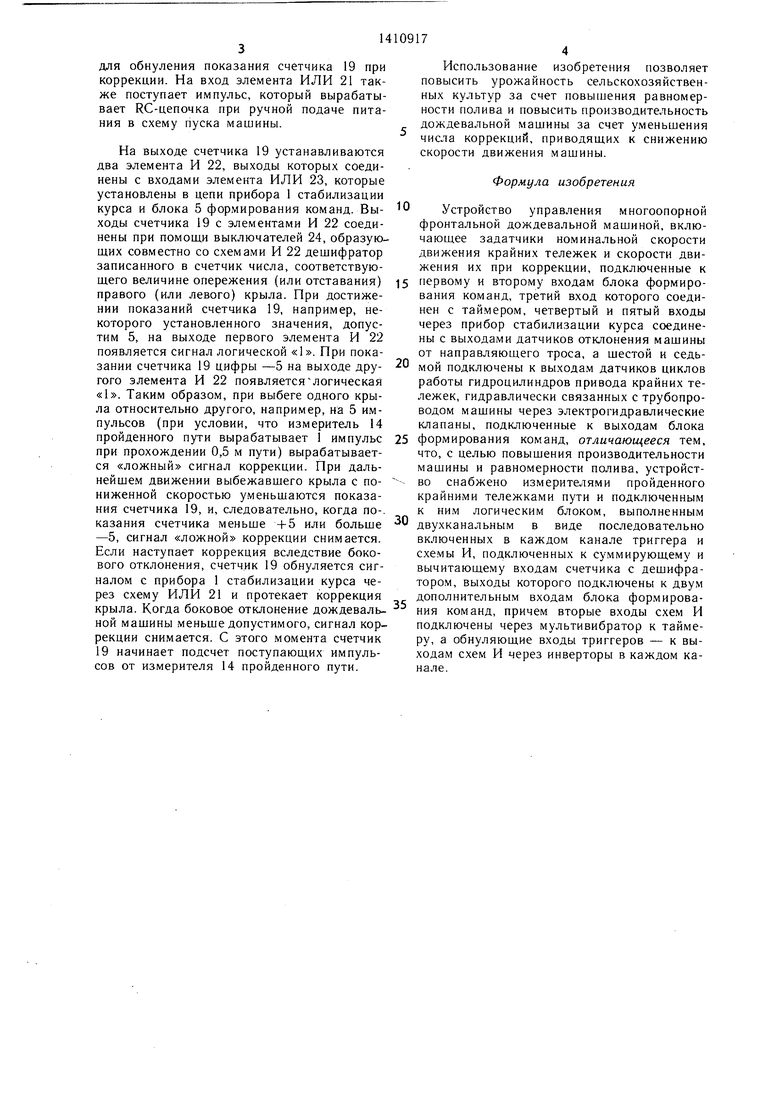
На фиг. 1 представлена блок-схема устройства управления многоопорной фронтальной дождевальной машиной; на фиг. 2 - схема логического блока и блока формирования команд.
Устройство состоит из прибора 1 стабилизации курса (фиг. 1 и 2), который служит для управления скоростями движения крайних тележек 2 (левой и правой) при отклонении штанг 3 датчиков отклонения машины от направляюшего троса 4. Датчики через прибор 1 стабилизации курса соединены с
ИЛИ 21, второго элемента И 22, элемента ИЛИ 23 и выключателей 24. Инвертор 20 (логическая схема НЕ) служит для инвертирования сигнала коррекции, вырабатываемого прибором 1 стабилизации курса по сиг- 5 налам датчиков отклонения от направляю- ш.его троса. Вход инвертора 20 соединен с выходом первого элемента И 17. На входы вторых логических элементов И 22 поступает сигнал коррекции, вырабатываемый дешиф- 10 ратором счетчика 19 по сигналам прибора 1 стабилизации курса.
Устройство управления многоопорной фронтальной дождевальной машины работает следуюшим образом
При движении ШМД без сигналов коррекции от измерителей 14 пройденного пути на логический блок 15 поступают электрические импульсы, количество которых соответствует пройденным путям крайних тележек (левой и правой). Если из-за проскаль15
блоком 5 формирования команд, предназ- 20 зывания колес или каких-либо других приначенным для формирования команд на включение и отключение электрогидравлических клапанов 6 правого и левого крыла машины. Электрогидравлические клапаны 6 служат для открытия и закрытия трубопроводов 7 питания гидроцилиндров 8 привода крайних тележек 2 (правого и левого крыльев), соединенных с основным напорным трубопроводом 9 машины. На гидроцилиндрах 8 приводов крайних тележек 2 установ25
чин истинная скорость какой-либо из крайних тележек изменилась (например, уменьшилась), количество импульсов от этой тележки меньше, чем количество импульсов другого крыла дождевальной машины. Логический блок 15 вырабатывает как бы «ложную коррекцию того крыла, которое проходит больший путь. При «ложной коррекции выбежавшая крайняя тележка 2 снижает свою скорость движения, и когда пути, пройлены датчики 10 циклов срабатывания гидро- 30 денные тележками обоих крыльев (левого и
цилиндров (для правого и левого крыльев), каждый из которых представляет собой кон- цебой выключатель, служащий для определения количества циклов, совершаемых гидроцилиндром 8 привода крайней тележки 2.
пр.авого), станут меньше допустимого, « ложный сигнал коррекции снимается. Эта коррекция происходит тогда, когда нет бокового отклонения дождевальной машины. В случае, если формируется боковое отклонение.
Каждый датчик 10 циклов срабатывания 35 логический блок 15 как бы не включается в гидроцилиндра соединен с блоком 5 форми-работу. Это поясняется принципом действия
логического блока 15.
Сигнал от измерителей 14 пройденного пути поступает на два триггера 16, соответственно на их входы S. С выхода триггеров 16 сигнал поступает на логический элемент И 17. Одновременно на вторые входы логических элементов И 17 поступает сигнал от мультивибратора 18. Выходные сигналы мультивибратора 18 по двум его выходам ее забегании) в режиме коррекции и под- 45 сдвинуты друг относительно друга таким об- соединен к блоку 5 формирования команд. разом, чтобы оба сигнала никогда не появ- Таймер 13 предназначен для формирования и.мпульсов времени и подключен к блоку 5 формирования команд. Измерители 14 пройденного пути, установленные на правом и левом крыльях, служат для измерения пройденного пути крайними тележками 2 (левой и правой) и соединены с логическим блоком 15, связанным с таймером 13 и блоком 5
рования команд. Задатчик 11 номинальной скорости движения крайних тележек предназначен для задания скорости движения крайних тележек 2, зависящей от нормы по- .-. лива, и соединен с блоком 5 формирования команд. Задатчик 12 скорости движения крайних тележек при их коррекции предназначен для задания пониженной скорости движения одной из крайних тележек 2 (при
50
формирования команд.
Логический блок 15 состоит из триггера 16, выполненного двухканальным, первого элемента И 17, мультивибратора 18, счетчика 19 дешифратора, инвертора 20, элемента
55
ляются одновременно. С выходов элементов И 17 сигналы поступают на входы счетчика 19. Например, сигналы с левого крыла дождевальной машины поступают на вычитающий вход -1, а сигналы правого крыла - на суммирующий вход +1 счетчика 19. Выходной сигнал элементов И 17 инвертируется с помощью инверторов 20 и подается на сбросной вход R триггеров 16. Мультивибратор 18 запускается от таймера 13. На сбросной вход R счетчика 19 поступает сигнал через элемент ИЛИ 21, от прибора 1 стабилизации курса (от обеих коррекций)
ИЛИ 21, второго элемента И 22, элемента ИЛИ 23 и выключателей 24. Инвертор 20 (логическая схема НЕ) служит для инвертирования сигнала коррекции, вырабатываемого прибором 1 стабилизации курса по сиг- налам датчиков отклонения от направляю- ш.его троса. Вход инвертора 20 соединен с выходом первого элемента И 17. На входы вторых логических элементов И 22 поступает сигнал коррекции, вырабатываемый дешиф- ратором счетчика 19 по сигналам прибора 1 стабилизации курса.
Устройство управления многоопорной фронтальной дождевальной машины работает следуюшим образом
При движении ШМД без сигналов коррекции от измерителей 14 пройденного пути на логический блок 15 поступают электрические импульсы, количество которых соответствует пройденным путям крайних тележек (левой и правой). Если из-за проскаль
зывания колес или каких-либо других при
чин истинная скорость какой-либо из крайних тележек изменилась (например, уменьшилась), количество импульсов от этой тележки меньше, чем количество импульсов другого крыла дождевальной машины. Логический блок 15 вырабатывает как бы «ложную коррекцию того крыла, которое проходит больший путь. При «ложной коррекции выбежавшая крайняя тележка 2 снижает свою скорость движения, и когда пути, пройденные тележками обоих крыльев (левого и
пр.авого), станут меньше допустимого, « ложный сигнал коррекции снимается. Эта коррекция происходит тогда, когда нет бокового отклонения дождевальной машины. В случае, если формируется боковое отклонение.
логический блок 15 как бы не включается в работу. Это поясняется принципом действия
Сигнал от измерителей 14 пройденного пути поступает на два триггера 16, соответственно на их входы S. С выхода триггеров 16 сигнал поступает на логический элемент И 17. Одновременно на вторые входы логических элементов И 17 поступает сигнал от мультивибратора 18. Выходные сигналы мультивибратора 18 по двум его выходам 5 сдвинуты друг относительно друга таким об- разом, чтобы оба сигнала никогда не появ-
0
5
ляются одновременно. С выходов элементов И 17 сигналы поступают на входы счетчика 19. Например, сигналы с левого крыла дождевальной машины поступают на вычитающий вход -1, а сигналы правого крыла - на суммирующий вход +1 счетчика 19. Выходной сигнал элементов И 17 инвертируется с помощью инверторов 20 и подается на сбросной вход R триггеров 16. Мультивибратор 18 запускается от таймера 13. На сбросной вход R счетчика 19 поступает сигнал через элемент ИЛИ 21, от прибора 1 стабилизации курса (от обеих коррекций)
для обнуления показания счетчика 19 при коррекции. На вход элемента ИЛИ 21 также поступает импульс, который вырабатывает RC-цепочка при ручной подаче питания в схему пуска машины.
На выходе счетчика 19 устанавливаются два элемента И 22, выходы которых соединены с входами элемента ИЛИ 23, которые установлены в цепи прибора 1 стабилизации курса и блока 5 формирования команд. Выходы счетчика 19 с элементами И 22 соединены при помощи выключателей 24, образующих совместно со схемами И 22 дещифратор записанного в счетчик числа, соответствующего величине опережения (или отставания) правого (или левого) крыла. При достижении показаний счетчика 19, например, некоторого установленного значения, допустим 5, на выходе первого элемента И 22 появляется сигнал логической «1. При показании счетчика 19 цифры -5 на выходе другого элемента И 22 появляется логическая «1. Таким образом, при выбеге одного крыла относительно другого, например, на 5 импульсов (при условии, что измеритель 14 пройденного пути вырабатывает 1 импульс при прохождении 0,5 м пути) вырабатывается «ложный сигнал коррекции. При дальнейшем движении выбежавшего крыла с пониженной скоростью уменьшаются показания счетчика 19, и, следовательно, когда по-, казания счетчика меньше +5 или больше -5, сигнал «ложной коррекции снимается. Если наступает коррекция вследствие бокового отклонения, счетчик 19 обнуляется сигналом с прибора 1 стабилизации курса через схему ИЛИ 21 и протекает коррекция крыла. Когда боковое отклонение дождевальной машины меньше допустимого, сигнал коррекции снимается. С этого момента счетчик 19 начинает подсчет поступающих импульсов от измерителя 14 пройденного пути.
Использование изобретения позволяет повысить урожайность сельскохозяйственных культур за счет повышения равномерности полива и повысить производительность дождевальной машины за счет уменьшения числа коррекций, приводящих к снижению скорости движения машины.
Формула изобретения
0
0
5
0
5
Устройство управления многоопорной фронтальной дождевальной машиной, включающее задатчики номинальной скорости движения крайних тележек и скорости движения их при коррекции, подключенные к 5 первому и второму входам блока формирования команд, третий вход которого соединен с таймером, четвертый и пятый входы через прибор стабилизации курса соединены с выходами датчиков отклонения машины от направляющего троса, а шестой и седьмой подключены к выходам датчиков циклов работы гидроцилиндров привода крайних тележек, гидравлически связанных с трубопроводом машины через электрогидравлические клапаны, подключенные к выходам блока формирования команд, отличающееся тем, что, с целью повышения производительности машины и равномерности полива, устройство снабжено измерителями пройденного крайними тележками пути и подключенным к ним логическим блоком, выполненным двухканальным в виде последовательно включенных в каждом канале триггера и схемы И, подключенных к суммирующему и вычитающему входам счетчика с дешифратором, выходы которого подключены к двум дополнительным входам блока формирования команд, причем вторые входы схем И подключены через мультивибратор к таймеру, а обнуляющие входы триггеров - к выходам схем И через инверторы в каждом канале.
npaSoe крыло
Прибое крыло
-1 JJe6oe
KpblflO
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1319802A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| Устройство для управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1496717A1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1501986A1 |
| Устройство автоматизированного управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1391544A1 |
| Устройство для управления электрической дождевальной машиной | 1987 |
|
SU1554831A1 |
| Устройство определения угла поворота секции дождевальной машины кругового действия | 2019 |
|
RU2707919C1 |
| Устройство для управления дождевальной машиной | 1985 |
|
SU1266495A1 |
| Фронтальная многоопорная дождевальная машина | 1987 |
|
SU1517855A1 |
Изобретение относится к сельскому хозяйству. Целью изобретения является повышение производительности машины и равномерности полива. Устройство управления включает прибор стабилизации курса 1 с датчиками отклонения от направляюш,его троса, снабженными двумя штангами 3, установленными над направляющим тросом, основной напорный трубопровод 9 и электро- гидравлические клапаны, установленные между трубопроводом питания 7 и гидроцилиндрами 8 приводов крайних тележек. Гидроцилиндры 8 снабжены датчиками 10 циклов их срабатывания, подключенными к блоку 5 формирования команд, к которому подключены также таймер 13 и задатчики 11 и 12 номинальной скорости движения крайних тележек и скорости движения при коррекции. Для повышения равномерности и урожайности устройство дополнительно снабжено измерителями 14 пройденного пути крайними тележка.ми и логически.м блоком 15, два входа которого соединены с измерителем пройденного пути и с выходом таймера, а два выхода подключены к блоку формирования команд. 2 ил. со (Л
фиг 2
| Устройство управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1319802A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
