Изобретение итис гится к пбработкг Mt-raiHi(Ti3 nafi.nefinpM, в частности к способам ч правления Г ибочными процессами.
li.L fib ичпбпетення - повышение точное ги г ибки де гали и упрощение уст- pot fCTBa автоматичеекого управления.
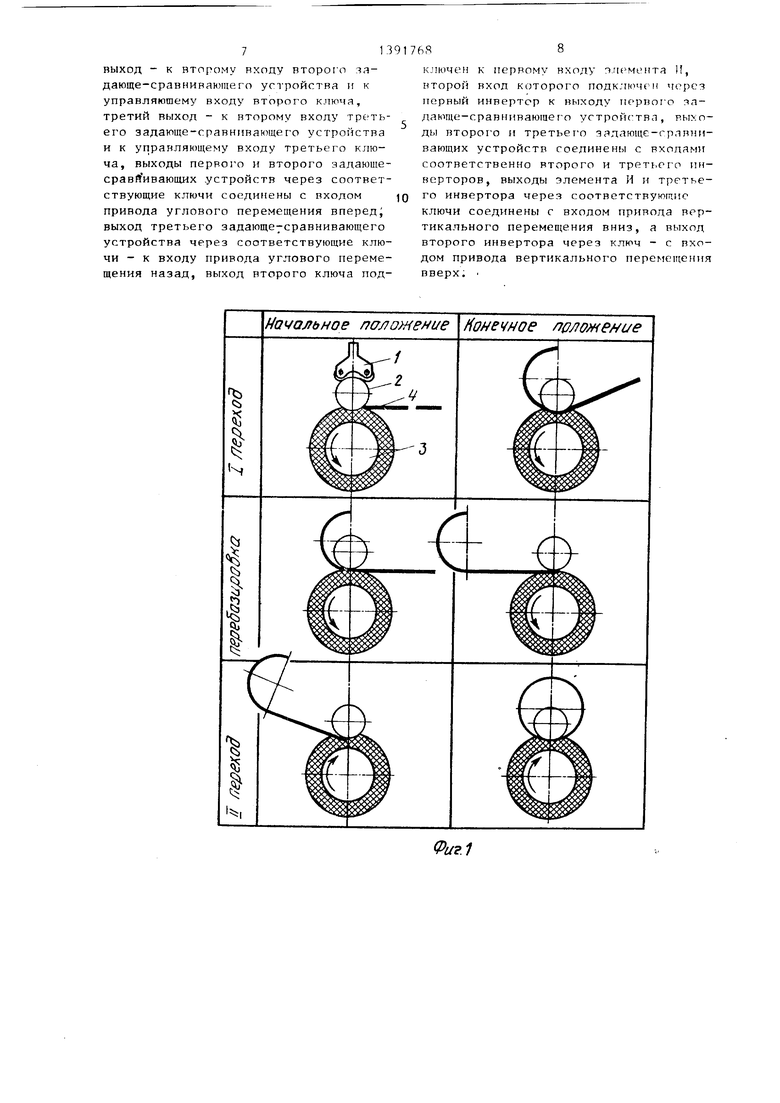
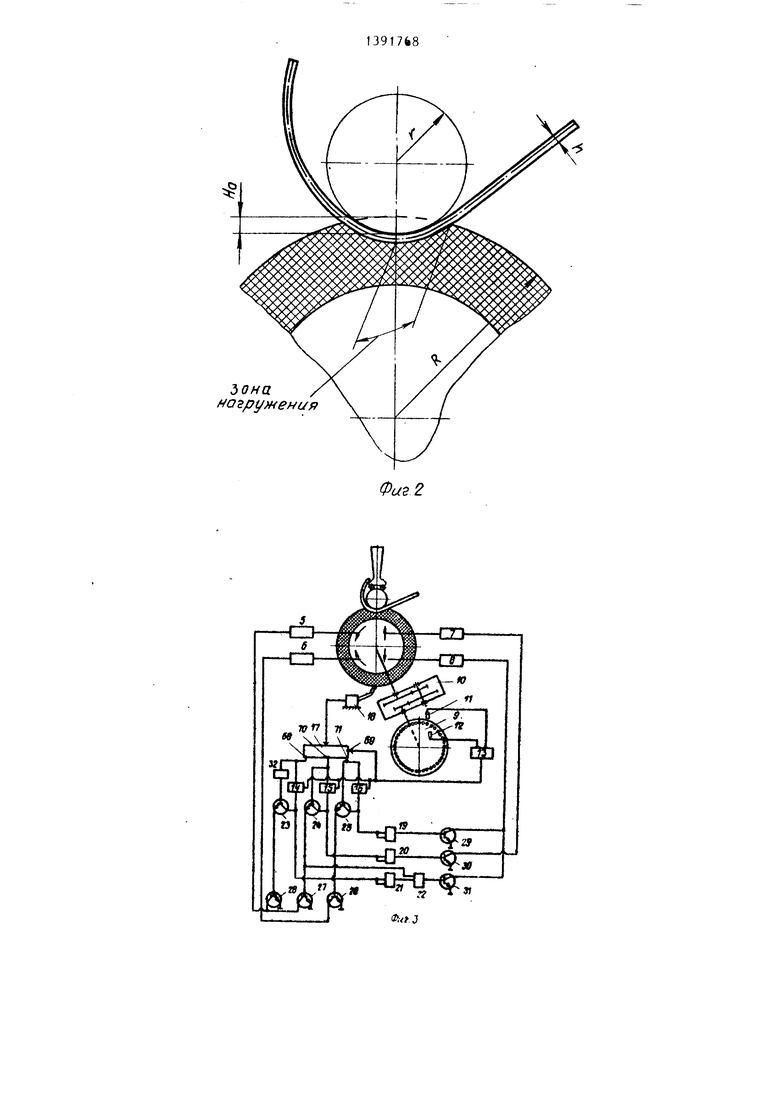
1 показан процесс гибки лллнномепных цилиндрических деталей малог о диаметра в два перехода;, на фиг, 2 - зона нагру ения; на фиг.З - устпойствс ан гоматического управления процессом г ибки; на фиг, 4 - счетное устройство; на фиг.З - выполнение задающе-сра 1Нипа1о1цего устройства (ЗСУ); на фиг,6 - выполнение логического устройства с датчиком положения валка с эластичньм покрытием.
,1 показаны опорная отенка i валка-оправки 2, валок 3 с эластичным покрытием, между валками перемещав ся заготовка Л.
Устройство автоматического управления процессс м гибки (фиг .З) состоит -(ч привоцои 5-8, датчика угловых пе )e te цeннй, диск 9 которого через редуктор И) С .)сдинен с валком 3, свето- диод 11 ii фотодиод 12 расположены п o4-jiibi CTopoTibi диска 9 с отверстиями ио/1ь ai, к .че г-щку импульсс В 13, зацающе -сравииг акнцих устройств (ЗСУ) 1 4 6 , . 1ог11че :ко и устройства 17, датчика 18 11(|Г1:.;.жения валка 3, iuipep- то.-..;п 1.i--2l, ити гк Нта 22 и транзис 1 11|)Чых лючей : ,--31, реле време- нм 32.
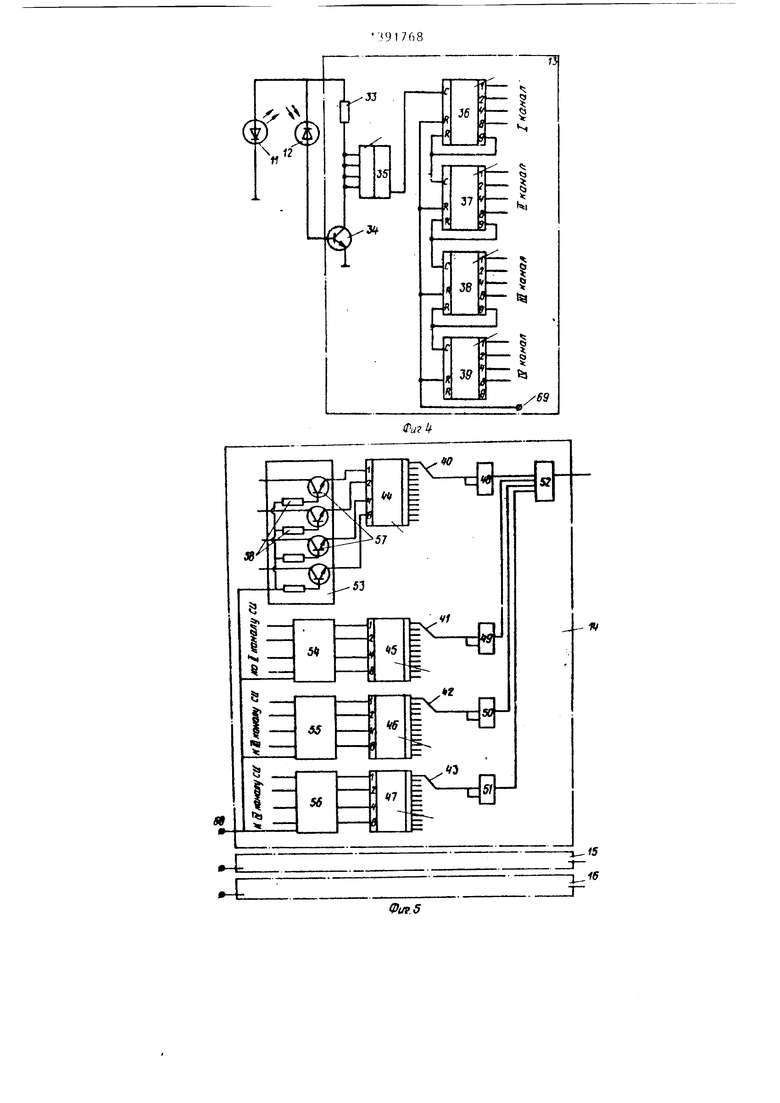
Счет)ое ycTpoiicTBO (фиг. 4) состоит КЗ 1 € --;исл 33, транзистора 34, триггера Шмитта 35, счетчиков импульсов .
J a/j, а Н)ше - с р а в н и в а юще е устройство (фиг.З) состоит из десяти позиционных переключателей 40-4}, л;ешифрато- ров , инверТ1.)ров 48-31, элемента совпо.дения 32, транзист орных ключей 33-36, ;ыпи лненных на транзисторах 37 и резисторах 38,
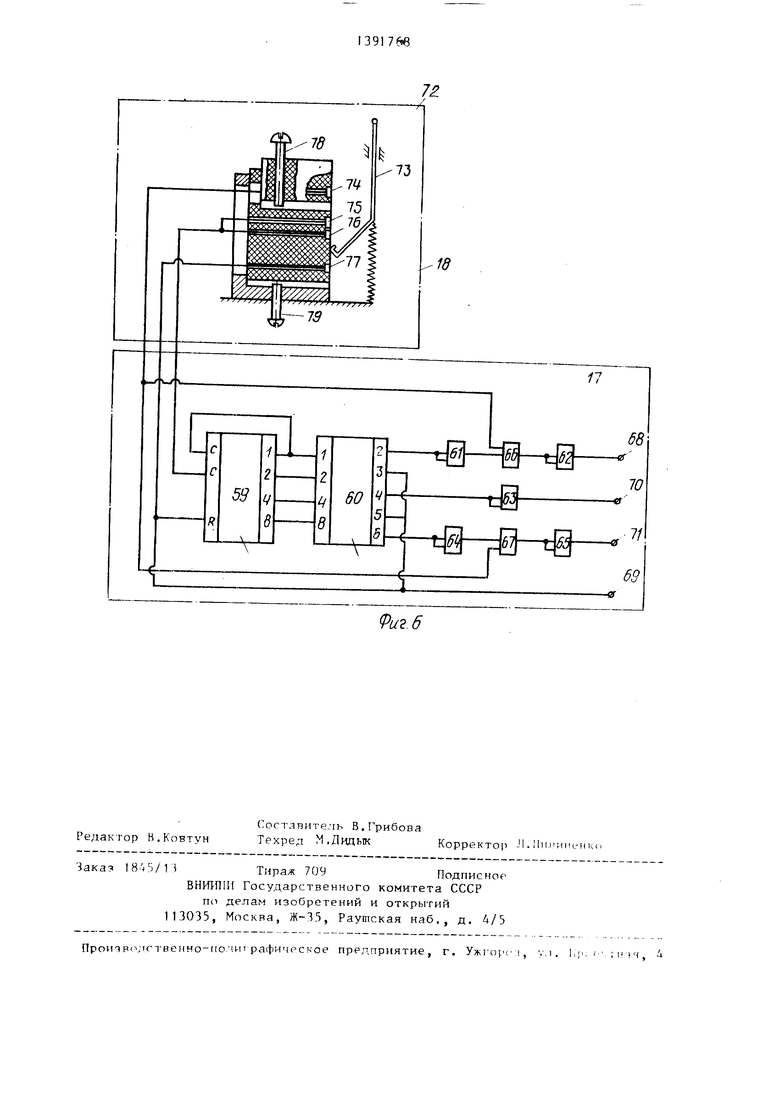
Лог ическое устройстве (фиг. 6)
40
45
Приводы 7 и 8 вертикального пере- мегпрния настраиваются таким образом, что отк,1 ючение природа 7 производится в момент подъема валка с эластичным покрытием до уровня рабочей Г лубины внедрения валка-оправки, а привода 8 в момент опускания палка с эластичным пок1зытием до уровня, достаточн(ЧЧ1 ,ги1я снятия трубчатой детали с ложемента ,
При подаче команды Внедрение, валок с эластичным псжрьггием поднимается и происходит кратковременное зяимпу.чьсов 39, дешиф- мыкание контакта /7, прииодяи ее счетнключает счетчи1 ратор 60, инверторы 61-63, элементы совпадения 66-67 и Kj;eMHbi 68-/1 для подключении к реле 32, ЗСУ 14-16 и с ч е т н и му V с г р о и с пз у 13.
Датчик женмя 72 (фиг .б) вклю- 55 чает iT ;j4yHiiK /3, скол), тяшя по по- ве рхнопи с ко гтактами 74-/7, регулировку производят винтами /В-/ - ,
чики импульсов 13 и 39 в исходное (ну;гевое) сск;тоя1 ИР, При дальнейшем подъеме валка с эластичным покрытием кратковременно замыкается контакт- 7Ь, соединенный с входом счетчика импульсов 39, считающего эт(тт импульс. Просчитав импульс, на первом выходе дешифр.-гспра 60 П яплиУстройство работает следующим образом.
Переключателями 40-4 на набираются три числа (,,m ) импул1,сон, определяющие соответственнсч ггрохожде- ние заготовки на первом переходе, перебазировке, втором переходе, покатанных на фиг.1 и рассчитываемых по формулам:
S
т, п
arccos(---)
(R-H,,-h/2)- 360
+ n
4-ir()
41Г. (R-h/2)
S 4ir(R-H -h/27
где u
R
H.
h S г
количество импульсов за полный оборс т палка с 3JTacTH4HbiM покрытием;
радиус валка с эластичным покрытием;
глубина внедрения валка-оправки;
толщина заготовки; ширина заготовки; радиус валка-оправки. Регулировочным винтом 79 производится настройка датчика положения валка с эластичным покры1ием так, ч р обы ползунок 73 каса.пся контакта 77 в положении касания вапка-оправки с валкпм с эластичным покрытием, и кинтом 78 так, . io6i i ПОЛЗУНОК 73 ка- с псч контакта 74 в положен 1И раГ очРй глубины внедрения.
Приводы 7 и 8 вертикального пере- мегпрния настраиваются таким образом, что отк,1 ючение природа 7 производится в момент подъема валка с эластичным покрытием до уровня рабочей Г лубины внедрения валка-оправки, а привода 8 в момент опускания палка с эластичным пок1зытием до уровня, достаточн(ЧЧ1 ,ги1я снятия трубчатой детали с ложемента ,
При подаче команды Внедрение, валок с эластичным псжрьггием поднимается и происходит кратковременное зячики импульсов 13 и 39 в исходное (ну;гевое) сск;тоя1 ИР, При дальнейшем подъеме валка с эластичным покрытием кратковременно замыкается контакт- 7Ь, соединенный с входом счетчика импульсов 39, считающего эт(тт импульс. Просчитав импульс, на первом выходе дешифр.-гспра 60 П яплиется сигнал логического нуля (на других ныходах-единица)..Первый выход дешифратора 60 в устройстве не используется. При дальнейшем подъеме валка с эластичным покрытием кратковременно замыкается контакт 75, на входе счетчика импульсов 59 появляется еще один импульс, что приводит к появлению логического нуля на втором выходе дешифратора 60. Пройдя через инвертор 61, сигнал в виде логической единицы подается на элемент совпадения 66. При достижении валком с эластичным покрытием рабочей глубины внедрения замыкается контакт 74, происходит остинов подъема валка с эластичным покрытием и на второй вход элемента совпадения 66 поступает сигнал логической единицы, тогда на его выходе появляется логический нуль, который, пройдя инвертор 62 в виде логической единицы, приходит на клемму 68 и подключает реле времени 32, которое дает задержку на начало вращения валка с эластичным покрытием, необходимую для базирования заготовки по линии контакта валка-оправки с валком с эластичным покрытием. Далее сигнал логической единицы приходит на базу транзистора ключа 23 и на базы транзисторов 57 в транзисторных ключах 53-56, открывая эти ключи, т.е. происходит подключение ЗСУ 14 к счетчику импульсов. Сигнал логической единицы (на базе ключа транзистора 23) в свою очередь открывает ключ 26 и таким образом происходит подключение привода 5 углового перемещения. Валок с эластичным покрытием начинает вращение, которое через редуктор 10 вращает диск 9.
При вращении диска фотодиод 12 кратковременно засвечивается от све- тодиода 1 1 . Полученные иьтпульсы С коллектора транзистора 34 поступают на триг гер Шмитта 35, формирующего прямоугольные импульсы, которые поступают на счетчик импульсов 36. При перепо.чнении счетчика импульсов 36 (I канал) его значение сбрасывается и сигнал подается на счетчик импульсов 37 (II канал), затем счетчик импульсов 36 (1 канал) вновь отсчитывает импульсы. При переполнении счетчика импу,И)С()и г I канала сигнал переходит на tJl канал. При переполнении IIГ каиллл - на IX канал. Импульсы, отсчпт1.|цт1 М1 le счетчиками импульсов
0
5
0
5
0
5
0
5
0
5
36-39, через открытые транзисторные ключи 53-56 поступают на дешифраторы 44-47. Вращение валка с эластичным покрытием продо.ггжается до тех пор, пока показания счетчика импульсов не совпадет с числом, набранным переключателями 40-43, при совпадении которых на входах инверторов 48-51 появляются логические нули, пройдя инверторы сигналы приходят на вход элемента совпадения 52 в виде логических единиц. Имея на всех входах э.чемента совпадения 32 логические единицы, на его выходе будет логический нуль, который закроет ключ 23 и, пройдя инвертор 21 в виде логической единицы, придет на элемент И 22, на втором входе которого от закрытого ключа 24 будет логический нуль. Таким образом на выходе элемента И 22 будет логическая единица, которая через ключ 31 подключает привод 8. Начинается опускание валка с эластичным покрытием. При кратковременном замыкании контакта 75 на третьем выходе И дешифратора 60 появляется логический нуль, который через клемму 69,,соединенную со счетчиком импульсов 13, приводит его в исходное (нулевое) состояние. При замыкании контакта 76, соответствующего положению контакта валка-оправки с валком с эластичным покрытием, на четвертом выходе дешифратора 60 появляется логический нуль, который, пройдя инвертор 63, проходит на клемму 70. Логическая единица поступает на ключ 24 и, открыв его, подключает дешифраторы ЗСУ 15 к работе. Через открытый ключ 24 сигнал логической единицы, который через элемент И 22, на обоих входах которого будут логические единицы, а значит на выходе - логический нуль, закрывает ключ 31 - опускание валка с эластичным покрытием прекращается, этот же сигнал, пройдя через ключ 27, подключает привод 5.
Вращение валка с эластичным покрытием происходит до тех пор, пока показание счетчика импульсов не совпадет с числом 15, набранным переключателями на ЗСУ 15; при совпадении - на выходе ЗСУ 15 появится логический нуль, которьй закроет ключ 24 - вращение валка с эластичным покрытием прекратится, а пройдя через инвертор 20, этот сигнал в виде логической единицы пройдет через ключ 30, приве5 . 13 дя в действие привод 7. Начинается подъем валка с эластичным покрытием. Кратковременное замыкание контакта 76 приводит к появлению на пятом выходе дешифратора 60 логического нуля, который через клемму 69, соединенную со счетчиком импульсов 13, приводит его в И ;ходное (нулевое) состояние.
При кратковременном замыкании контакта 75 логический нуль, появившийся на шестом выходе дешифратора 60, пройдя инвертор 64, поступает в виде логической единицы на элемент совпадения 67. При дальнейшем подъеме валка с эластичным покрытием происходит заг-1ыкание контакта 74 - на втором BxoXte элемента совпадения 67 так же появляется логическая единица. Имея на обоих входах элемента совпадения 67 логические единицы, на его выходе будет логический нуль, который, пройдя через инвертор 65 в виде логической единицы, поступает на клемму 71. Логическая единица поступает на ключ
25 и, открыв его, подключает ЗСУ 16 к работе. При обработке числа, набранного на ЗСУ 16, на его выходе появляется логический Нуль, который закрывает ключ 25 - прекращается вра- щепие валка с эластичным покрытием и, rfpoйдя через инвертор 19 в виде логической единицы, он поступает на ключ 29. который подключает привод 8. Валок с эластичным покрытием начинает опускаться. После прохода контакта 77 происходит очистка счетчиков импульсов 13 и 59. Останов привода 8 произойдет при опускании валка с эластичнмм покрытием на величину, достаточную для снятия трубчатой детали с ложемента.
Изобретение, позволит повысить производительность труда, точность изготовления деталей, упростить устройство автоматического управления.
Формула изобретения
1. Способ автоматического управления процессом гибки длинномерных цилиндрических деталей, при котором измеряют в процессе гибки текущие значения вертикального перемещения и пращения валков, сравнивают с заданными значениями и из полученных раз 1остей формируют сигнал коррекции отличающийся тем, что, с целью повышения точности гибки.
8
текущее значение перемещения определяют суммированием количества импульсов от датчика угловых перемещений валка с эластичным покрытием, а заданные значения рассчитываются по формулам
/ - п о г. arccosC)
П
()-360 ()5
+
()
где т, - количество импульсов на
первый переход;
т., - количество импульсов на перебазировку ;
mj - количество импульсов на второй переход;
п - количество импульсов за полный оборот валка с эластичным покрытием; R - радиус валка с эластичным
покрытием;
Нд - глубина внедрения валка оправки;
h - толпд на заготовки; S - ширина заготовки; г - радиус валка оправки, и формируют сигнал коррекции враше- ниям и вертикальным перемещениям валков.
2. Устройство для автоматического управления процессом гибки длинномерных цилиндрических деталей, содержащее приводы вертикального перемещения и вращения валка с эластичным покрытием, датчик вертикального положения и датчик углового перемещения валка, включающий редуктор, фотоэлектрический преобразователь, счетное устройство и логическое устройство, отличающееся тем, что, с целью упрощения устройства, оно содержит реле времени, три инвертора, элемент И, три задающе-сравнина; ш1их устройства, девять ключей, при этом выход счетного устройства соединен с первыми входами логического и задаю- ще-сравнивающих устройств, второй вход логического устройства подключен к BbTxo iy датчика вертикального положения, первый выход - к второму входу первого задающе-сравнивающегп устройства и через реле времени к упраяля- ющему входу первого клмч нторой
7
выход - к второму входу второго за- дающе-сравниваюгаего устройства и к управляющему входу второго ключа, третий выход - к второму входу третьего задающе-сравнивающего устройства и к управляющему входу третьего ключа, выходы первого и второго эадаюше- сравй ивающих устройств через соответствующие ключи соединены с входом привода углового перемещения вперед; выход третьего задающе7сравнивающего устройства через соответствующие ключи - к входу привода углового перемещения назад, выход второго ключа под1768«
к.пючеи к первому входу элемента И, второй вход которого подключен через первый инвертер к выходу первого задающе-сравнивающего устройства, рыхо- ды второг о и третьег о зядающе-грав} и- вающих устройств соединены с входами соответственно второго и третьего инверторов, выходы элемента И и третье- Q го инвертора через соответствующие ключи соединены с входом привода вертикального перемещения вниз, а выход второго инвертора через ключ - с входом привода вертикального перемещения вверх, 
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННО-БЛОКИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2021453C1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU956805A2 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| Цифровой многоинтегральный прибор для тензометрических весов | 1982 |
|
SU1030661A1 |
| Формирователь циклов многопроходной прокатки | 1985 |
|
SU1294403A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU968454A1 |
| Устройство для диагностирования шин | 1987 |
|
SU1444640A1 |
| Формирователь циклов многопроходной прокатки | 1987 |
|
SU1437122A2 |
| Способ измерения площади листа растения и устройство для его осуществления | 1984 |
|
SU1259980A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
Изобретение относится к обработке металлов давлением, в частности к управлению гибочными процессами. Цель изобретения - повышение точности обработки и упрощение устройства автоматического управления. Пля этого определяют текущие значения углового перемещения и сравнивают с заданными значениями, рассчитанными по формулам: m,n r-arccos(r-Ho/r)/( -h/2) 360+nS/4lr(R-H,-h/2); m nS/ /4 ;r(R-h/2); m nS/4ff( ), где m, - количество импульсов на первый переход; m - количество импульсов на перебазировку; nij - количество импульсов на второй переход; п - количество импульсов за полный оборот валка с эластичным покрытием; R - радиус валка с эластичным покрытием; HO - глубина внедрения валка оправки; h - толщина заготовки; S - ширина заготовки; г - радиус валка-оправки. Устройство содержит фотоэлектрический датчик угловых перемещений, датчик положения валка, ключи, инверторы. Задающие сравнивающие блоки переключаются логическим блоком к датчикам. По результатам сравнения формируют сигналы управления на приводы вращения и вертикального перемещения валка. Упрощение устройства обеспечивается применением большей части элементов стандартного исполнения.2 с. п. ф-лы, 6 ил. цэ (Л со со 05 00
ьона f ospt/we f/ff
ut. J
vf
w
,n
.15 .i6
(Риг.6
| Закиров И.М., Лысов М.И | |||
| Гибка на валках с эластичным покрытием | |||
| М.: Машиностроение, 1985, с.85. |
