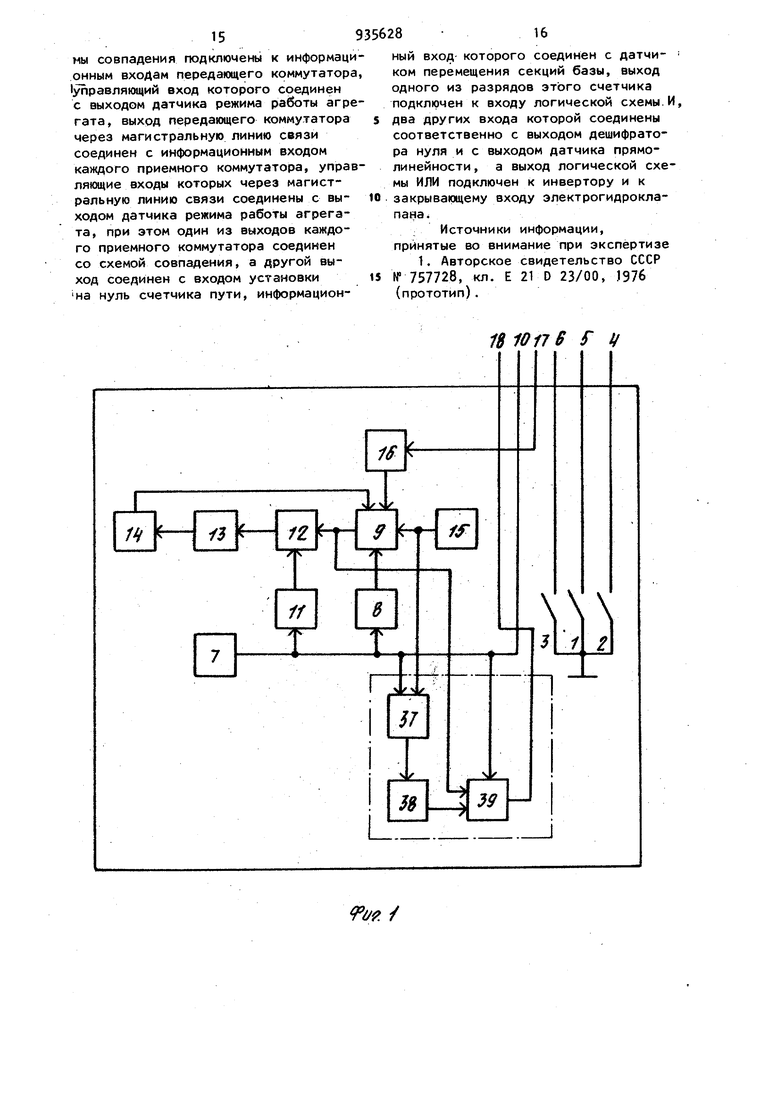
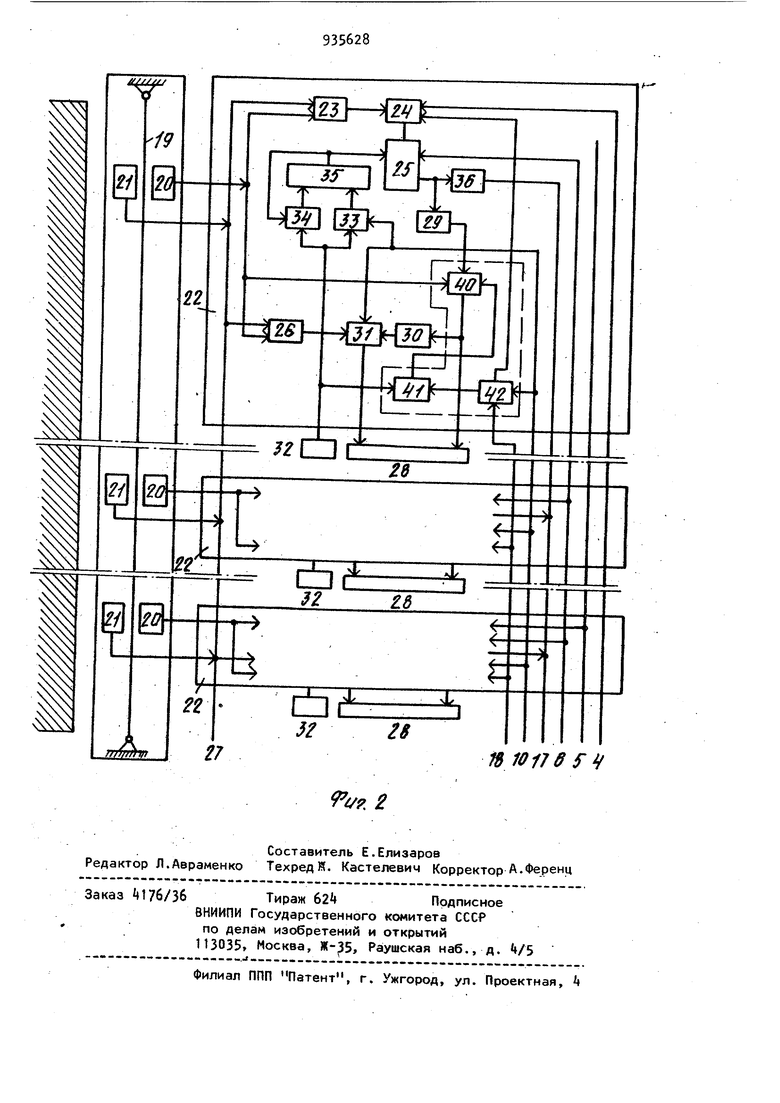
тельно снабжен формирователем вр менных интервалов, передающим комму тором, и логической схемой И, а каж дый управляющий блок снабжен логической схемой ИЛИ, счетчиком пути, приемным коммутатором, причем вход формирователя временных интервалов через логическую схему И подключен к выходу генератора задающих импуль сов и выходу датчика режима работы агрегата, а его.выход и выход схемы совпадения подключены к информационным входам передающего коммутатора, управляющий вход которого соединен с выходом датчика режима работы агрегата, выход передающего Коммутатора через магистральную линию связи соединен с .информационным входом каждого приемного коммутатора, управляющие входы которых через магистральную линию связи сое динены с выходом датчика режима работы агрегата, при этом один из выходов каждого приемного коммутато соединен со схемой совпадения, а др гой выход соединен со входом установки на нуль счетчика пути, информационный вход которого соединен с датчиком перемещения секций базы, в ХОД одного из разрядов этого счетчи ка подключен к входу логической схе мы ИЛИ, два других входа которой соединены соответственно с выходом дешифратора нуля и через магистраль ную линию связи с Датчиком прямолинейности, а выход этой логической схемы ИЛИ подключен к инвертору и к закрывающему входу электрогидроклапана. На фиг. 1 приведена схема блока автоматического задания программы; :на фиг. 2 - функциональная схема аппаратуры, размещаемой на агрега;те в лаве. Устройство содержит ключи дистан |ционного управления 1, 2 и 3, предназначенные для управления концевыми точками агрегата и ориентирования (сброс ), которые подключены к магистральным линиям связи ,5 и 6,. датчик 7 режима работы агрегата, подключенный через инвертор 8 к одному из входов схемы 9 совпадения и мafиcтpaльнoй линии 10 связи, а через инвертор 11 к счетчику 12 задания программы. К выходам этого счетчика прдклю;Чен через переключатель 13 задания программы дешифратор 1 установ ки программы, выход которого подклюен к одному из входов схемы 9 овпадения. К двум другим входам схемы 9 совпадения подключен генератор 15 задающих импульсов и через инвертор 16 магистральная линия 17 выход схемы 9 совпадения подСВЯЗИ, ключен к магистральной линии связи 18. Схема аппаратуры, размещаемой на агрегате в лаве (фиг.2), содержит изическую линию 19 задания для контроля прямолинейности, проходящую через крайние точки агрегата и выполненную, например, в виде натянутой гибкой нити (троса), закрепленной на крайних секциях базы, с которой взаимодействуют датчики 20 и 21 прямолинейности. Причем датчики 20 контролируют опережение секциями базы линии задания (выпуклость на забой), а дат|чики 21 - отставание секций базы от линии задания, т.е. опережение крайних точек агрегата (вогнутость). Датчики 20 во всех управляющих блоках (устройствах) 22, за исключением концевых, подключены сразу к двум входам разделительных схем 23 схеме (ИЛИ -НЕ , а в концевых управляющих устройствах соответствующие им датчики 20 подключены только к одним из входов схем 23. Это сделано для того, чтобы схемы всех управляющих устройств были идентичными. К другим входам схем ИЛИ-НЕ 23 в концевых управляющих устройствах подключены все датчики 21. Выходы схем 23 подключены к одному из входов схемы совпадения 2, ко второму ее входу в одном из крайних управляющих устройств подключена магистральная линмя связи k, а в другом крайнем управляющем устройстве - магистральная линия 5 связи. К выходам схемы 2 совпадения в каждом управляющем устройстве подключен суммирующий вход реверсивного счетчика 25, входы установки на нуль которых соединены с магистральной линией связи 6. Датчики 20 и 21 контроля прямолинейности в управляющих устройствах 22 подключены к разделительным схемам 26 (схемы ИЛИ-НЕ), причем в концевых управляющих устройствах на один из входов схем 26 подключен соответствующий концевой датчик 20, а на другой вход подключены все датчики 21, соединенные общей магистральной линией 27 связи. В ос тальных же управляющих устройствах на оба входа схем 26 подключен выход .датчиков 20, который имеет соединение также и с отключающим входом электрогидроклапанов 28 во всех управляющих устройствах. Устройство (фиг.2) содержит также дешифраторы нуля 29, подключенные к выходам реверсивных счетчи ков 25. Устройство содержит инвертор 30 схему совпадения 31, один вход кото рой соединен с магистральной линией связи 10, а второй вход с выходом разделительной схемы 2б. Выход схемы совпадения 31 соединен с открывающим входом электрогидроклапана 28. Датчик перемещения секций базы 3 подсоединен к одним из входов схем совпадения 33 и З. причем второй вход схемы совпадения 33 подключен к магистральной линии связи 10, а второй вход схемы .совпадения 3 соединен с выходом разделительной схемы ИЛИ- 35, входами которых являются выходы схем 33 и 3 совпадения Выход разделительной схемы ИЛИ 35 соединен с вычитающим входом реверс ного счетчика 25, выходу которого подключен дешифратор Зб максимума. j Генератор 15 задающих импульсов (фиг.1) соединен с одним входом логической схемы И 37, друой ее вх соединен с выходом датчика режима работы агрегата 7, а выход логической схемы И 37 соединен с входом фо мирователя 38 временных интервалов, выход которого подключен к одному входу передакицего коммутатора 39, на два другие входа которого подклю чен выход схемы 9 совпадения и выхо датчика режима работы агрегата 7. Выход передающего коммутатора 39 со динен с линией 18 связи. Выход дешифратора 29 нуля подклю чен к одному из входов схемы ИЛИ lO второй вход которой подключен к одному из разрядов счетчика 1 пути, а третий вход подключен к выходу датчика 20 прямолинейности, выход схемы ИЛИ kQ подключен к закрывающему входу электрогидроклапана 28 и через инвертор 30 к входу схемы 31 совпадения. К третьему входу схем 2 совпаде ния в крайних управляющих устройствах подключен один из информацион 86 ных входов приемных коммутаторов А2, которые содержат в себе логический элемент НЕ и два двухвходовых логических элемента И. Во всех остальных управляющих устройствах 22 второй и третий входы схемы 24 совпадения подключены к одному из информационных выходов приемного коммутатора k2. Деимфратор, входящий в формирователь 38 временных интервалов формирует информацию от двоичного счетчика, выполняя следующие функции: X{j Х X 0 Х Х(2 . где Х - выходные импульсы первого разряда (низшего разряда) двоичного счетчикаt XQ - выходные импульсы задающего генератора-, XQ - выходные импульсы второго разряда двоичного счетчика Х - выходные импульсы п разряда двоичного счетчика - выход дешифратора с периодом кратковременных импульсов Т, 2Тг, г период следования импульсов задающего генератора), ч выход дешифратора с периодом кратковременных импульсов 0 Тр; Чр- выход деимфратора с периодом кратковременных импульсовТ„ . Устройство работает следующим образом. Считаем условно, что агрегат находится в исходном, строго прямолинейном положении. Дпя подачи базы агрегата на забой оператор устанавливает ключи управления крайними точками агрегата 1 и 2 в замкнутое положение и кратковременно замыкает ключ установки в исходное положение 3 (сброс ), подавая при этом по магистральным линиям 4-6 связи соответствующие сигналы на аппаратуру, расположенную непосредственно на агрегате, находящемся в лаве. Гидросистема агрегата на подачу базы не включена, при этом датчик 7 режима работы агрегата находится в режиме соответствующего состояния и его сигнал через инвертор 8 подается на схему 9 совпадения и на магистральную линию 10 связи. Одновременно через инвертор 11 с датчика 7 режима работы агрегата снимается сигнал удержания в нулевом состоянии счетчика задания программы 1 2 и подается сигнал на запирани .логической схемы И 37, а также устанавливается в заторможенное нулевое состояние двоичной счетчик 38 формирователя временных интервалов. Кроме того, передающий 39, прием ный Ц2 коммутаторы под воздействием их управляющие входы сигнала от датчика 7 режима работы соединяю между собою линию связи 18 выход сх мы 9 совпадения с входом схем 24 совпадения управляющих блоков 22. При этом счетчики 1 пути удерживаются в заторможенном нулевом состоянии сигналами приемных коммутаторов k2. В связи с тем, что на переключателе 13 задания программы установле на комбинация, отличная от нуля, на выходе дешифратора 13 установки программы, выполняющего функцию И-НЕ, будет присутствовать сигнал, разрешающий прохождение через схему 9 совпадения сигналов от генератора 15 задающих импульсов. Поскольку перед этим была подана ключом 3 команда Сброс на О, то и на инверторе 16 и в магистральной линии 17 связи ёудет также присутствовать сигнал, разрешающий прохож дение импульсов через схему 9 совпа дения от генератора 15. В результате этого начнется запи импульсов в счетчик 12 задания прог мы и их подача через передающий 39 приемные 41 коммутаторы и магистральную линию 18 связи на входы сх |МЫ совпадения 24 управляющих уст|ройств 22. Так как в исходном положении ai- регат является прямолинейным, то с датчиков 20 и 21 прямолинейности, подключенных к управляющим устройст вам 22 никакого запрета на прием сигналов от приемного коммутатора 4 и на запись программы подачи базы на забой не поступает. Действительно, поскольку датчики 20 И 21 разом нуты, то на выходах инверторов 23 в управляющих устройствах 22 будет оставаться разрешающий сигнал ив связи с тем, что ключи дистанционно управления концевыми точками агрега та 1 и 2- замкнуты, то поступающие на вход схемы 24 совпадения от приемного коммутатора 42 сигналы будут записываться в реверсивном счетчике 25. Как только число импульсов, записавшихся в счетчик 12 задания программы блока задания программы на пульте управления агрегатом достигнет заданной величины (такое же число импульсов будет записано и во все реверсивные счетчики 25 ), появится сигнал на выходе дешифратора 14 установки программы и импульсы от генератора 15 на выход схемы 9 совпадения проходить не будут. Устройство готово к выполнению цикла автоматической порционированной подачи базы на забой. Далее оператор переключает гидросистему агрегата на подачу базы. При этом срабатывает датчик 7 режима работы агрегата, и счетчик 12 задания программы через инвертор 11 сбрасывается в нуль, инвертор 8 блокирует прохождение импульсов от генератора импульсов 15, открывается логическая схема И 37, растормаживается двоичный счетчик 38 формирователя временных интервалов и на его вход поступают импульсы от генератора 15 импульсов, одновременно переключаютс передающий 39 и приемные 42 коммутатор1Ы и соединяют выход формирователя временных интервалов 38 через магистральную линию связи 18 с входом цепи установки на.нуль счетчиков пути 41, что растормаживает счетчики пути 41, т.е. с выхода формирователя временных интервалов 38 выдается команда разрешения для работы схемы, реализующей регулирование .скорости выдвижки секций базы на забой . 8 начале момента времените которого начинается выдвижка, состояние управляющих устройств 22, характеризуется следующим. На выходах разрешительных схем ИЛИ-НЕ 26 имеется сигнал 1 так как все датчики прямолинейности 20 и 21 разомкнуты, примем, как видно на фиг.2, датчики 21 через магистральную линию связи 27 подключены к одним из входов схем 2б в концевых управляющих устройствах 22. Электрогидроклапанй 28 все закрыты. На всех входах схемы ИЛИ 40 сигнал равен О, так как на дешиф9ратор 29 нуля от реверсивного счетчика 25 поступают не нулевые комбинации. Датчики 20 прямолинейности разом нуты, и счетчик 1 пути находится в нулевом состоянии. Это означает, чт на закрывающем входе электрогидроклапана 28 остается сигнал О, а на выходе инвертора 30 - 1. В связи с этим, при включении one ратором гидросистемы на подачу базы, в магистральной линии 10 связи по явился сигнал 1, который через сх мы 31 совпадения управляющих устройств 22 откроет электрогидроклапаны 28. От каждого электрогидроклапа на давление рабочей жидкости подает ся в группу домкратов передвижки, и база агрегата начинает перемещаться на забой. Датчики перемещения секций базы 32 (один датчик перемещения секций базы и один электрогидроклапан обычно устанавливаются на группу четырех шести секций) начинают отсчитывать величину перемещения секций базы, подавая импульсы в соответствующее управляющее устройство. Подсчет этих импульсов производится счетчиками 1 пути, на вход установки на нуль которых действуют импульсы формирователя 38 временных интервалов через магистральную линию связи 18, а также через передающие 39 и приемные 2 коммутаторы, что устанавливает счетчики 1 пути в нулевое состояние через заданные промежутки времени, В процессе подачи базы на вход ус тановки на нуль счетчиков 1 пути поступают кратковременные импульсы, например, с периодом следования 5 с, а счетчику 41 пути задан, например, предел максимального счета до разряда (2, это означает, что секци базы должны выдвигаться со скоростью не более t-x импульсов датчика перемещения секций базы за пять секунд. Если же какие-либо группы секций базы проходят заданный путь быстрее 5-ти секунд, то соответствующие счет чики 41 пути, подсчитав четыре импул са, выдадут на выходе сигнал 1, а это значит, что на выходе схекш. ИЛИ 40, и на закрывающем входе элект рогидроклапана 28 появится сигнал 1, а на выходе инвертора 30 и на открывающем входе электроклапана сиг нал О. 28 Электрогидроклапаны закроются и эти группы секций будут остановлены. Закрытие электрогидроклапанов приводит к повышению давления 8 гидросистеме,что увеличивает скорость перемещения отстающих секций. Электрогидроклапаны тех групп секций, которые прошли заданный путь за время, большее 5 с, закрываться не будут, так как перемещение секций не превышало установленной скорости. По истечении этого времени все счетчики 41 пути вновь устанавливаются в нулевое состояние кратковременным импульсом от формирователя 38 временных интервалов, что вызовет в управляющих устройствах 22 соответствующих группе секций, превысивших скорость выдвижки, появление сигнала на выходе счетчиков 41 пути, на закрывающем входе электрогидроклапана 28 и сигнала 1 на его открывающем входе. Электрогидроклапаны остановленных групп секций открываются и секции начинают передвигаться, выравнивая линию забоя. Описанный процесс автоматической регулировки скорости повторяется аналогично до тех пор, пока асе секции базы не переместятся на полный шаг подачи, который складывается из импульсов датчиков 32 перемещения секций базы, которые поступают на схему памяти, построенную из схем совпадения (схемы И) 33 и 34 и разделительной схемы (схемы или) 35, а далее на вычитающие входы реверсивных счетчиков 25. Как только какая-то группа секций базы пройдет заданный шаг подачи, ее (датчик 32 перемещения секций базы выдает число импульсов, равное заданной программе, и в реверсивном счетчике 25 управляющего устройства 22 данной группы появится нулевая :комбинация. Поэтому на выходе дешифратора 29 нуля данного управляющего устройства и на закрывающем входе электрогидроклапана появится сигнал 1, а на открывающем входе электрогидроклапана О. Электрогидроклапан 28 данной группы закроется. Если все группы секций базы выполнят, заданный шаг подачи, то во всех управляющих устройствах реверсивные счетчики 25 придут в нулевое состояние и все Электрогидроклапаны 28 закроются. Окончание цикла по дачи базы оператор может определить например, по давлению в гидромагист рали подачи базы с помощью соответствующих устройств контроля или каким-либо другим путем, после чего он приступает к выполнению следующих технологических операций по управлению агрегатом, отключая при этом гидросистему от подачи базы. При этом размыкается датчик 7 режима работы, в описанной последовател ности снова происходит автоматическое формирование и запись программы на перемещение агрегата на следующи цикл подачи на забой. Одновременно с этим затормаживаются в нулевом состоянии двоичный счетчик 38 формирователя временных интервалов и счетчики 1 пути, что подготавливает их к автоматической регулировке скорости подачи секций базы на забой в следующем цикле подачи и исключает ошибку в регулировании скорости. Описанный случай показывает нормальную работу агрегата. Однако, как показывает опыт работы угледобывающих комплексов и агрегатов при перемещении их на забой (передвижка конвейеров комплексов и без ai- регатов) происходит их систематичес кая недодвижка до заданного положения. Этот процесс носит чисто случайный характер, причем малые недодвижки являются значительно более вероятными, чем недодвижки большие по величине. Поэтому в устройстве предусматривается так называемый режим работы по максимальному варианту. Это означает, что если какиегруппы секций недодвигаются на заданный шаг, и, если величина этой . недодвижки не превышает некоторой наперед заданной величины, называемой зоной самовыравнивания, то на последующем шаге подачи базы, программа на перемещение данной группы все равно формируется ра ной шагу подачи, который суммируется с имеющей место недодвижкой на предыдущем цикле подачи. Чтобы не получилось прогрессирую щего увеличения шага подачи для какой-либо группы секций базы сверх допустимой величины, определяемой ц лым рядом технических параметров и характеристик механизмов агрегата, в каждом управляющем устройстве 22 к выходам реверсивных счетчиков 25 подключены дешифраторы Зб максимума, ограничивающие запись программы во все управляющие устройства, так как их выходы через магистральную линию 17 связи и инвертор 16 подключены на один из входов схемы 9 совпадения. Пусть теперь в результате систематического воздействия большого числа случайных причин какая-то группа секций базы начинает отставать так, что все же наступает такой момент, когда сработал датчик 21 прямолинейности, установленный на данной группе секций базы и агрегат искривился вогнутостью на забой, т.е. концы базы агрегата обгоняют ее среднюю часть. Причем дальнейшее искривление агрегата уже является недопустимым. Тогда на последующем цикле подачи агрегата на забой, несмотря на то, что во всех .управляющих устройствах (в том числе и в концевых) записана программа перемещения, крайние точки агрегата не получат перемещения. Действительно, так как все датчики 21 общей магистральной линией 27 связаны и подключены к одним из входов разделительных схем 2б в концевых управляющих устройствах 22, то,несмотря на включение датчика режима работы агрегата 7, в концевых управляющих устройствах на выходах схем 51 совпадения сигнал появиться не может и включение электрогидроклапанов 28 на крайних точках агрегата не произойдет. В то же время все остальные электрогидроклапаны откроются и начнется выравнивание агрегата. Если же за один цикл подачи агрегат не выравнивается (датчик 21 прянолинейности остается замкнутым), то на последующий цикл формирование и запись программы будет происходить во всех управляющих устройствах за исключением концевых, так как отсутствие сигнала 1 на выходе разделительных схем 23 в этих управляющих устройствах не обеспечивает прохождение импульсов записи через схему 2 совпадения, так как на одном из ее входов будет сигнал О. Поэтому описанный процесс выравнивания будет происходить до тех пор, пока все датчики 21 прямолинейности не разомкнутся. Пусть теперь в результате многих |причин какая-либо группа секций начинает обгонять все остальные с ции и агрегат начинает искривлять выпуклостью на забой, наступает момент, когда датчик 20 прямолинейности наэтой группе замыкаетс При этом сразу же происходит отключение электрогидроклапана 28 данной группы секций непосредстве но датчиком 20 прямолинейности через схему ИЛИ kO. При этом схем ми ИЛИ-НЕ 23 и 26 исключается воз можность записи программы в данно управляющее устройство 22 и вклю чение электрогидроклапана 28 до тех пор, пока не произойдет выравнивание агрегата. Описанный процесс автоматическо выравнивания будет происходить и. в случае первоначального ввода агр гата в эксплуатацию, если при монт же он был собран непрямолинейным. Работа устройства при дистанцио но-автоматическом управлении с раз воротом агрегата в плоскости пласта происходит следующим образом. Если необходимо верхни,й конец остановить, а нижний подавать вперед, то оператор размыкает ключ 2 и кратковременно замыкает ключ установки в исходное положение 3. При этом во все управляющие устрой ства 22, за исключением верхнего концевого, записывается заданный шаг подачи базы. При срабатывании датчика 7 режима работы агрегата, все электрогидроклапаны 28, за исключением верхнего концевого, открываются и агрегат (база) нач нает перемещаться с разворотом нижним концом вперед. При этом воз можны случаи, когда заданный шаг передвижки будет выполняться во всех включившихся группах и когда заданный шаг не будет выполняться. 3 любом режиме агрегат будет следовать за линией задания 19 проходящей через крайние точки агр гата, так как именно срабатывание датчиков 20 прямолинейности будет управлять включением-отключением электрогидроклапанов, формированием и записью программы, приводящих к развороту агрегата в плоскос ти пласта. Аналогично устройство работает и при развороте агрегата вперед верхним концом. Все режимы перемещения (подача, равнивание, разворот в плоскости пласта) секций базы угледобывающего агрегата осуществляются при автоматическом регулировании скорости подачи секций базы на забой. В схеме устройства автоматического регулирования скорости предусматривается возможность установки различных скоростей подачи базы путем установки определенного периода кратковременных импульсов в форми|рователе 38 временных интервалов и путем задания необходимого предела максимального счета в счетчике ll пути. Применение данного устройства позволяет увеличить производительность добычи угледобывающего агрегата фронтального действия за счет автоматического регулирования скорости выдвижки секций базы что обеспечивает прямолинейность всей базы в процессе ее подачи на забой и создание благоприятных условий для исполнительного органа, который в процессе работы непрерывно перемещается по направляющим, установленным на секциях базы. Устройство повышает надежность добычного агрегата. Возможность задания различных скоростей выдвижки базы позволяет использовать автоматизированный агрегат для добычи угля различной крепости . Формула изобретения Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата по авт.св. N 757728, отличающееся тем, что, с целью повышения точности поддержания прямолинейности за счет обеспечения автоматического регулирования скорости выдвижки секций базы на забой, блок дистанционного управления и автоматического задания программы снабжен формирователем временных интервалов, передающим коммутатором и логической схемой И, а каждый управляющий блок снабжен логической схемой ИЛИ, счетчиком пути, приемным коммутатором, причем вход формирователя временных интервалов .через логическую схему И одключен к выходу генератора задающих импульсов и выходу датчика режима работы агрегата,а его выход и выход схеиы совпадения подключены к информационным входам передающего коммутатора, управляющий вход которого соединен с выходом датчика режима работы агрегата, выход передающего коммутатора через магистральную линию связи соединен с информационным входом каждого приемного коммутатора, управляющие входы которых через магистральную линию связи соединены с выходом датчика режима работы агрегата, при этом один из выходов каждого приемного коммутатора соединен со схемой совпадения, а другой выход соединен с входом установки на нуль счетчика пути, информационный вход которого соединен с датчи- ком перемещения секций базы, выход одного из разрядов этого счетчика подключен к входу логической схемы.И,
два других входа которой соединены соответственно с выходом дешифратора нуля и с выходом датчика прямолинейности, а выход логической схемы ИЛИ подключен к инвертору и к
закрывающему входу электрогидроклапана
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
If 757728, кл. Е 21 D 23/00, )97б (прототип),
18 10116 f I/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU956805A2 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU968454A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Способ автоматического управления выдвижкой секций базы угледобывающего агрегата и устройство для его осуществления | 1982 |
|
SU1052670A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1974 |
|
SU600304A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1973 |
|
SU459757A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1986 |
|
SU1382976A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
1/. /
