1
Изобретение относится к автоматизации управления угледобывающих комплексов и агрегатов, а именно к средствам обеспечения прямолинейности базы.
По основному авт. св. № 757728 известно устройство авто.матического поддержания прямолинейности базы угледобывающего агрегата, в котором управление порционной подачей базы на забой осуществляется электрогидроклапанами и специальными управляющими устройствами, обрабатывающими информацию от датчиков перемещения базы. Устранение накопления ошибок при работе агрегата осуществляется посредством дополнительного устройства контроля прямолинейности 1.
Недостатком известного устройства является то, что контроль момента окончания выдвижки всех секций базы на забой осуществляется по величине и стабильности давления в магистральном гидропроводе, что не позволяет достоверно судить об окончании этого технологического процесса и в конечном счете ведет либо к потере времени на передвижку секций базы, либо к недодвижке секций, что нарушает работу агрегата и ведет к снижению производительности.
Цель изобретения - повышение точности поддержания прямолинейности за счет обеспечения возможности контроля окончания выдвижки секций базы на забой путем логического взаимного сравнения выходной информации дешифраторов нулевого состояния, подключенных к управляющим реверсивным счетчикам.
10 Указанная цель достигается тем, что в устройстве каждый управляющий блок снабжен ключом дешифратора максимума,ключом дешифратора нуля, дополнительным инвертором и дополнительной логической схемой ИЛИ, а блок дистанционного управ5 ления снабжен ключом состояния ЭГК, ключом запрета ГИ и индикатором окончания выдвижки базы, причем выходы датчика режима работы агрегата подключены соответственно через магистральную линию
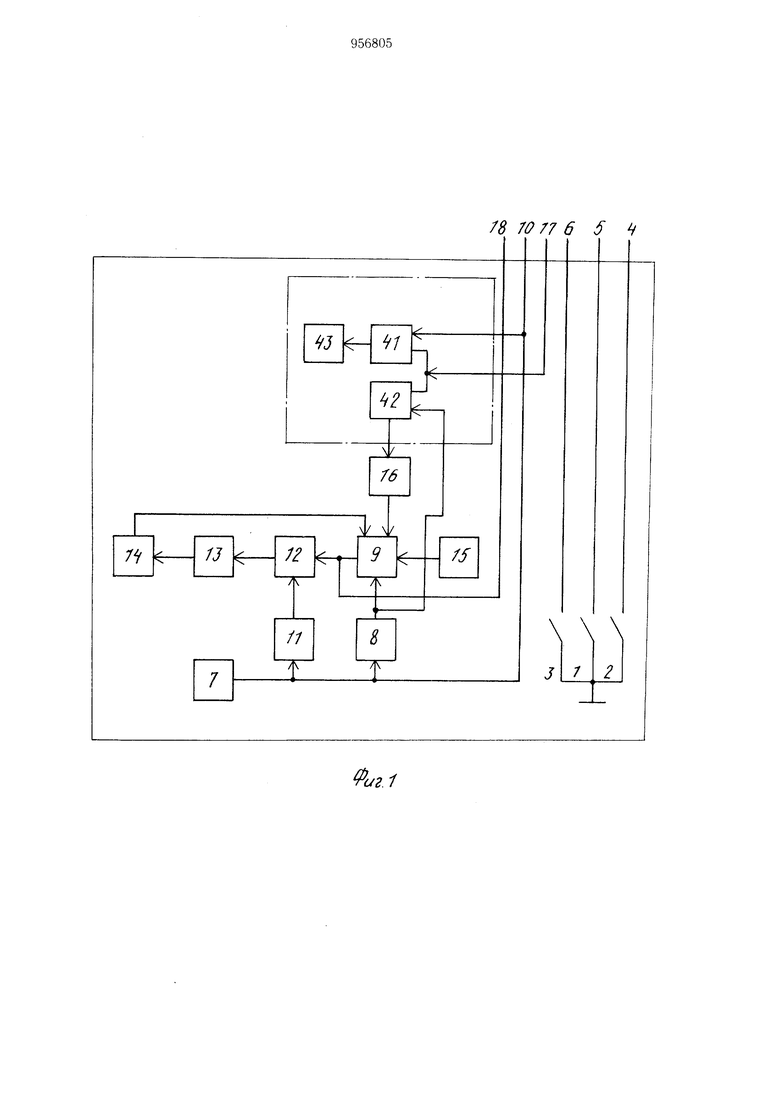
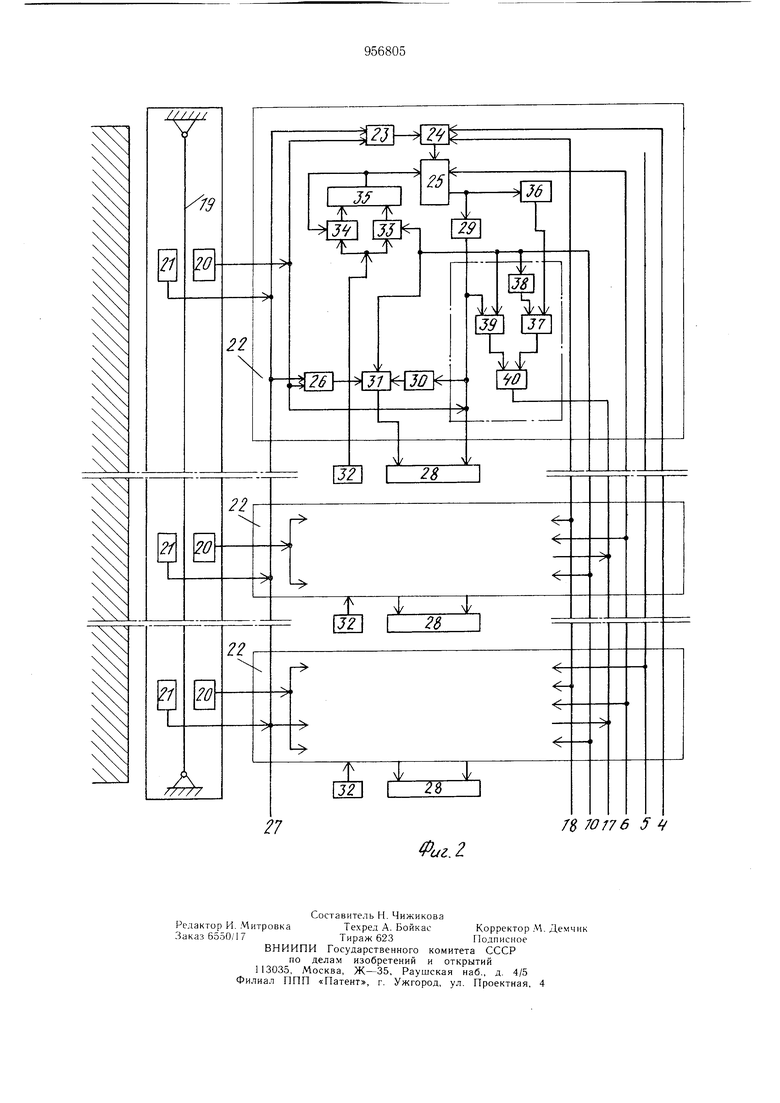
20 связи к управляющим входам ключей дещифраторов нуля и через дополнительные инверторы к управляющим входам ключей дешифраторов максимума, а информационные входы ключей дешифраторов нуля и ключей дешифраторов максимума соединены соответственно с выходами дешифраторов нуля и с пь ходами дешифраторов максимума, а выходы этиХ КоТючей дешифраторов куля и ключей дешифраторов максимума 1слючей соединены с соответствуюш,нми входами дополнительных логических схем ИЛИ, выходы которых через магистральную ;гинию связи подключены к информационному входу ключа запрета ГИ и информационному входу ключа состояний ЭГК, причем в блоке дистанционногч) унравления выход1 1 датчика режима работы aiperaTa нодк.лючены соответственно к у травляк)И1ему входу ключа состояний ЭГК и через инвертор к у1 равля1ОН1ему входу к.г1юча запрета ГИ, которого подключеп через второй инвертор к входу схемы соннадсния. На (ри;. 1 представлена функ1и-1ональная схемй блока автома1Ч1ческого задагп-;я lipOipaMMbi; на фиг . 2фуикнионалы;ая схема б.лока диста1Н1ИО1;ного управления п автоматического задания fipoграммы. ycTpoiicTBC) содержит ключи 3 дистанii.HOHHOio унравления, npeдlfaзh aчeii П)le ;1ля управления концевыми точкамн агроата ;; ориептир;)5ания (сброса на 0), которые 1К)дк,почены к магистральным ,: Н;1иям 1 6 сиязи, датч11К 7 режима аботы агрегата, подключенный через 1-1нве)тор 8 к схеме 9 совнадения и к магистра/ьной линии И) связи, а через инвертор к счетчику ;задачия программы. К выходам счегчика 12 подключен через нереключате.пь К5 задания программы ден1ифрат)р 14 установки нро1ра 1МЬ, выход которого подключен па один из BxcviOii схемы 9 совпадения. К двум другим нход; м схемы 9 совпадения подк.почем генератор 5 задающих импульсов и через 1нверто) 16 магистра;пн-1ая , к,.ючен к магистра,1ьпой линии 18 связи. ycTjioiicTBo также сс;де1)жит физическую .) за..ча1Н1я ДьМя К(.)нтроля нрямолинеЙ1К)стн 19, нроходян1ую через крайние точки aiperara и вы)1олнс1П1ую в виде натяпутой гибкой иити (троса), закрепепной на крайних секциях базы, с кото;)ой взаимо л.ействуют .;1атчики 20 и 21 фямолинейности. Причем датчики 20 контролируют опережение секциями базы линии задания(выиук,:н)сть на забой), а датчики 21 -- отставание секн. базы от лииии задания, т. е. i OinVTOCTb. Да1чикн 20 во всех унравляюЕНих б/юках 22 .за и(ч,-почепием к()1Н|евых подк;|ючены сразу к дву.м входам разделите,льных схем 23 (схем ИЛИ-- НЕ), а в кон 1евых управляющих .блоках 1:оответствуюп.1:-1е им датч1 ки 20 нодключены только к одни.м из ВХОЛ.ОВ схем 23. Это сделано для того, чтобы схем1л всех унразляюгцих блоков были идентичны. К другим входа.м схе.м ИЛИ-ИЕ 23 в концевых унравляюших блоках пс.дк,;юче,пы все датчики 21. Выходы схем 23нодк.лючены к входным схемам совпадения 24, на два других входах которьгх в край}1их управляюии1х б,-;оках подключены магист)а,лы:ые линии связи 4 и 18 в одном и Гч и 18 R другом, а во всех оста. .лянлцих блоках оба ЛУг вхол.а схе.м 24сов |аде 1ия подключены к одной и же магнстра.(;ой , 18 связи. К вь:ХО.ТУ схемы 24 сов 1адс1н;я в каждом viiрав,тякянем б.локе 11ол.к,:поче 1 с ммируюший вхсхч реверенв.пого счетчика 25. /Датчики 20 и 2 контроля поямолинс:- ности в угфавлиюидих блоках 22 юдключе Нз1 также к разделите,чьным схе.чам 26 (схеМ1)1 И.дИ - iJE), нричем в концевых упраз.1ЯЮН1ИХ б,локах на один из входов схем 26 |1одк,1ючеп соответствующий концево11 дагч П 20, а па дрчлой вход подключены все .илчики 21, соединенные общей MaiT-iCT)a,i3Hoii ..линией связи 27. На остальных ун;)ар.ЛЯЮИ1.ИХ б.локах г;а оба входа схем 26 юдк.лючен вых()Д датчиков 20, колч)р1)|й имеет лакже соед1П1е1Н е и с с.ключаюнгим вх:.)Л.ОМ . ектрогид)окла11а110В 28 во всех yiiрар.,ляюи1,их уст1)ойе1вах. Во всех унрав.лwiCHiUix б,локах имеюлся ден1И(зра ну,ля, нодк;ночепн ;е к выходам реверсив:н,1х счелчнкоз 25. и к ВЫХОДУ д()|)а1 о)(;в 29 ,1кп;е 1ы инверторь 30 и (ггк.люмаюшие нx. .;е тро ид|М)клаианов 28. акнм )б;}азом, вход|); схсл.; i 1 ciBna.icгия во исех нрав, б.локих (жазываютс,1 и;дк,1ЮЧСЧ ПЬ МИ к раЧ1е;ите, схемам 2(i. ;п1ве) 3(; и ;а|Л:с гра.л,н(Л .линии свя и 1П, а в)1ходь 7ЛИХ гоичадсиия иодаюлся иа вк.лючаюндк- ;;хс;дз1 э.лс -лро Л(Д 1оклапанов 28. И схему чтр(Йслл4а входят датчики 32 перемещении секнлй базы, которые юдк.иочспы к ;;д|( из вх(;..лог; схем 33 li 3-} сов1:а,1.епия. причем вх(;л.ы схем 33 :овиадеиия п1;ДК,110че Ы к ма1Л(стра, липни связи 10, г. е. (})актически к датчику 7 режима )абот1 : ai)era:a, а на .е ВХОД1) схем 34 совпадения ио.лк:иочсны раз,че,1И1е.)1х схем {схема Я/М) 35. входами кото|)ых являются выходы схем 33 и З- сов1адения. Выход схем 35 подас-лся также в каждом управ,ляк)1нем блоке к В1лчита1 ;и1см входу |)еверсив}П)1х счетчиков 25, а к выхол.а ос.1едних пол.к,люче;1ы акже .ра горы 36 чаксг;мума, а их выход|)1 c()c.UHieiiBi с |111ф()р 1анионными входами к,почей 37 дсши;)ратора максимума. л1Г)апляк)ни1е входы кочорых подключе :ы чере: допс,лните,11)|;ые инве()торы 38 в магистра, линии СВ5ГП( 10. Эта ,линия годк,лючена лакже к л1рав;1Я1Оп:им входам ключей 39 деи1иф)атора ну,ля, информа 1.ионньге входы которых подкгпочены к выхода де1нифраторов 29 ну.ля, а выхо.лы к;1к;чей 37 денп1фратора макс| м -ма и ныход1з1 колючей 39 де цифратора ну,ля подк,лк1чсиь1 к iixo.лам до1юл ительных .логических схем }()
ИЛИ, выходы которых через магистральную линию связи 17 соединены с информационными входами ключа 41 состояний ЭГК (фиг. 1) и ключа 42 запрета ГИ. К выходу ключа 41 состояний ЭГК подключен индикатор 43 окончания выдвижки базы, например лампа накаливания.
Устройство автоматического поддержания пря.молинейности секций базы угледобывающего агрегата работает следующим образом.
Условно допустим, что агрегат находится в исходно.м прямолинейном положении. Для подачи базы агрегата на забой оператор устанавливает ключи 1 и 2 управления крайними точками агрегата в замкнутое положение и кратковременно замыкает ключ 3 установки в исходное положение (сброс на «О), подавая при этом по магистральным линиям связи 4-6 соответствующие сигналы на аппаратуру, располагаемую непосредственно на агрегате в лаве. Гидросисте.ма на подачу базы не включена, при этом датчик 7 режима работы агрегата находится в режиме соответствующего состояния и его сигнал через инвертор 8 подается на схему 9 совпадения и на управляющий вход ключа 42 запрета ГИ, ключ открывается и, тем самым, соединяет линию связи 17 через инвертор 16 с одним из входов схемы 9 совпадения.
Одновременно сигнал от датчика 7 режима работы агрегата подается в магистральную линию связи 10, а также закрывает ключ 41 состояний ЭГК и через инвертор 11 снимает сигнал удержания счетчика 12 задания программы в нулевом состоянии. В связи с тем, что на переключателе 13 задания програ.ммы установлена комбинация,, отличная от нуля, то на выходе дешифратора 14 установки программы, выполняющего функцию И-НЕ, присутствует сигнал, разрещающий прохождение через схему 9 совпадения сигналов от генератора 15 задающих импульсов, а поскольку перед этим подана ключом 3 команда сброс на «О, то и на выходе инвертора 16 также присутствует сигнал, разрешающий прохождение импульсов через схему 9 совпадения от генератора 15 импульсов. В результате этого начинается запись импульсов в счетчик 12 задания программы и их подача по .магистральной линии связи 18 на управляющие блоки 22 аппаратуры, расположенной в лаве на агрегате.
Так как исходное положение агрегата является проямолинейным, то с датчиков 20 и 21 прямолинейности, подключенных к управляющим блока.м 22, никаких сигналов запрета на прие.м из магистральной линии связи 18 и запись сигналов фор.мирования программы подачи базы на забой не поступает. В связи с тем, что датчики 20 и 21 разомкнуты, на выходах разделительных
схем 23 в упран.тющих O.-IOKJX 22 присутствует разре1и;11О1иий С}|гн л.
В связи с тем, что к.1ючи 1 ;i 2 хмравления концами агрегата замкнуты. IK-; ма1мстральной линии связи 18 через смлил 24 совпадения в реверсивные счетч1ки 23 всех управляющи.х блоков начинается запись и.мпульсов программы на подачу базы.
Как только число и.мпульсов, записанных в счетчик 12 задания программы блока дистанционного управления достигает заданной величины (такое же число импульсов записано и во все реверсивные счетчики 25), сигнал на выходе дешифратора 14 снимается и импульсы ,от генератора 15 задающих импульсов на выход схе.мы 9 совпадения не проходят. В этом состоянии устройство подготовлено к выполнению цикла автоматической порционной подачи базы на забой.
Оператор переключает гидросистему на подачу базы. При этом срабатывает датчик 7 режима работы агрегата и счетчик задания программы через инвертор 11 сбрасывается в нуль, инвертор 8 блокирует прохождение импульсов от генератора 15 импульсов через схему совпадения 9 в магистральную линию связи 18. Кроме того, закрывается ключ 42 запрета ГИ и открывается ключ состояний ЭГК. за счет чего магистральная линия связи 17 соединяется с индикаторо.м 43 окончания выдвижки базы.
В начале цикла подачи базы состояние элементов управляющих блоков характеризуется следующим. На выходах схем 26 сигнал «1, так как все датчики 20 и 21 прямолинейности разомкнуты,причем, как видно из фиг. 2, датчики 21 через линию связи 27 подключены к одним из входов схем 26 в концевых управляющих блоках. Электрогидроклапаны 28 все закрыты. На выходах дешифраторов 29 нуля сигнал «О, так как в реверсивных счетчиках 25 записана программа подачи базы, а на выходах инверторов 30, подключенных к дещифраторам 29 нуля сигнал «1. Кроме того, в магистральной линии связи 10 имеется сигнал «1 от датчика 7 режима работы агрегата. Поэтому на всех входах схем 31 совпадения имеются сигналы «1 и выходные сигналы этих схем совпадения открывают электроклапаны 28. От каждого электрогидроклапана давление рабочей жидкости подается в группу домкратов передвижки и база агрегата начинает пере.мещаться на забой.
При этом сигналы от 7 режима работы агрегата через магистральную линию связи открывают ключи 39 дешифраторов нуля и закрывают ключи 37 дешифраторов максимума, тем самым, подключая все дешифраторы 29 нуля через ключи 39 дешифратора нуля и логические схемы 40 ИЛИ к магистральной линии связи 17. Датчики 32 перемсмцения секций базы (оди датчик перемещения секций базы и один электрогидроклапаи обычно устанавливаются на групну из четырех-шести секций) начинают отсчитывать величину неремещения секций базы, нодавая импульсы в соответствующий ему управляющий блок 22. От датчиков пути импульсы через управляемую от магистральной линии связи 10 схему памяти, выполненную на схемах ЗИ и 34, совпадения (схемы И) и разделите,1ьную схему 35 (схема ИЛИ) поступают па вычитающие входы реверсивных счетчиков 25, Как то,:1ько какая-то rpyrma секций базы проходи заданный путь (щаг подачи), ее датчик пути выдает число импульсов, равное заданной программе, и в ревереивнг;м счетчике управляющего блока 22 данной группы появ,1яется нулевая комбинация, Ири этом на В1)1ходе депшфратора пуля дапно1-о управляюгцего блока появляется сигпал, который отключает электрогидроклапан 28 группы секций, этим же сигналом че1)ез инвертор 30 снимается сиг-нал ео входа схем1 | 31 совпадения, чю исключает возможность повторно10 включения электрогндрок.чанана на данном цикле нодачи д,.1я группы секций, уже по.шостью выно;п ив111ей задан:чый таг перемен1ения. Так же сигнал е выхода денщфратор;) 29 нуля поступает на ключ 39 де1ии()ратора НУЛЯ яаино о унрав,1яюп1е Ч) б.лока. .с,1,и нее. группы секций базы вын(.-|няют заданный таг подачи, то чо всех управ,.1яю|Ц11 б.ижах реверсивные счетчики 25 приходят в и левпе состояние и все электро -ид с;1.:1П11а : | закрываются, на всех нн(1к)р-у ациопиых входах х.почей 39 ден И1рратора ну,1я В()31;пк,ак)-с си;-нал1,1. соотвечствующие закрытию -лтектрогидроклапанов, а это оз.чачает, что в магистральной линии связи 17 есть и)1формация о закрытии всех электрогидроклананов, которая и отображается па б.токе 43 индикации. При незакрытом хотя бы одном электро1-идроклацане эта информация отсутствует, что свидетельствует о нродо;1жающемся режиме выдвижки секций базы на забой. I oc;ic получения информации об окончан|ц-1 выдвижки базы, онсратс р приступает к выполнению следующих техноло ических операций lio управлению агрегатов (распор базы, В)1емка угля, подтягивапие секций крепи и т, п.), при этом отключает 4-m|)oси:сте.му подачи базы, отчего разм11П ается датчик 7 режи.ма работы aiperara и в описанной иос;1едовательности снова iipoHcxo;ur aivroMaTHHCCKOc (})()1мирова11ие и запис.. npoipa.MMiji на перемещение агрегата ;1..1я с,1едующего цикла подачи базы па забой. Если lia каждом цикле подачг: строго вь1ио, заданный таг. то оцнсанный нрочесс новторяется без изменений. Однако, как ноказывает опыт работы угледобывающих комплексов и агре;атов, при иеремещенин их tia забой (передвижка конвейеров. комп,1ексов и без а1регатов) происходит их систематическая недодвижка до задаппого ио,-|(жепия. Этот процесс посич чисто (.лучайный характер, 1;пичем ма,1ые не.юдвижки яв;1яются .5начите;1ьно бо.lee вероятными, пеже.щ недодвпжки бол Н1ие Пи ве;1нчине. Г1оэт(). в устройстве .чредхсматривается так режим рабо||)1 макс:ма;цц ому варианту. Это означает, что если к;;кпс-то группы секций недодви1а отся на заданный Hiai и если ве.личина этой нсдодвижки tie нревьппает некот()рой наперед заданной величины, назьщаемой зоной самовыращшвания. на пос;к:Д Ю Цсм таге нодачи программа на nepcMemeiH-ie грунлы ((JCJPMH)уется равной заданном) тагу подачи, который суммируется с имевшей место педодвижк(М1 на предыдущем цикле подачи. Для устранения прогрессирующего увеличения niara подачи для какой-либо группы секций баз)| сверх допустимой величины, опредслясмой не1и.1стоянством характера оаботь arpei Ta, в каждом управляющем блоке 22 к ц гх1}да.м Нверсивных счетчиков 25 ,чодк;цочены Д1мнифрато)ы 36 макси,.1а, orpaHHHHiiafOHiHe запись во все ynpa.Bjiiuonuie уст 1ойства. так как их выходы li режиме записи програм ц | соедипень; лер(3 к.лючн 37 (})пато)(3 максим -ма, ю;;1чсские схемы 40 ИДИ, магистральную .щHiiio связи 17, к,иоч 42 запрета и HHBIMV гор ih с одним из Bxo;u B схемы 9 coBna.ieД;|я примера .ломустим. Ч7о в пезу.н.гзте си1:тсма-1ическог() И()з.чсйс-1вия бо.-|ыпс);о чис.а с,1учай ;ых 1рнчин какая-то г.лн;п секций баз|,| отставать так. что iiaс1у)ает такой момент. ко|-да срабатывает датчик 21 нрямсхчинейности, установленный на данной груипе секций базы, и агрегат иск.ив, яется ВОГНУ гостью на забой, т. е. концы ai-pciara обгсжяют ее среднюю часть. Иричем дальнейп1ее искрнвлени( а -регата является 1е.чопустимым. Тогда на пос,лсдую цем щлк.лс нодачи а1рсгата на за бой. н(ЧМ(тря на то, ЧТО во всех Л1равляюiiuix устройствах (в том чис,;е и в кон1.) записана какая-то программа перемещения, крайние гочки arpeiaTa не получают не)еменкния. Действите.1)Но. так как все датчики 21 ли;ц- ей связи 27 связащ. и лод|.:лючены к синим нз входов разде.лительных схем 2о в к(;нцеьь х управляющих стр(;йствах, ijecMOTpH на включе ще датчика 7 режима работы arpeiaij:, и концевых л1рав.лнюплнх -стройет1)а на иьгходах ,хем 31 совпаде1цш си1-на.; чоявлятлЯ не мг)Ж1: и вк.почение э.лектрогндрок.лагапсш 2Н на крайних точках агрегата не происходит. В то же время все ос-а.льные электрс1гндро«.тапаны открываются и начинается выравнивание агрегата.
Если же за один цикл подачи агрегата выравнивание агрегата не происходит (датчик 21 остается замкнутым), то на последующий цикл формирование и запись программы цроисходит во всех управляющих устройствах за исключением концевых, так как отсутствие сигнала «1 на выходе схем
23в этих управляющих блоках не обеспечивает прохождение импульсов записи из магистральной линии связи 18 через схемы
24совпадения. Поэтому описанный процесс выравнивания происходит до тех пор, пока все датчики 21 не разомкнутся.
Пусть теперь в результате многих причин какая-либо группа секций начинает обгонять все остальные секции и агрегат начинает искривляться выпуклостью на забой, наступает мо.мент, когда датчик 20 контроля прямолинейности на этой группе замыкается. При этом сразу же происходит отключение электрогидроклапана 28 данной группы секций непосредственно датчиком 20. При этом схема.ми ИЛИ-НЕ 23 и 26 исключается возможность записи программы в данный управляющий блок 22 и включения электрогидроклапана 28 до тех пор, пока не происходит выравнивание агрегата. Описанный процесс автоматического выравнивания происходит и в случае первоначального ввода агрегата в эксплуатацию, если при монтаже он собран непрямолинейным.
Работа устройства при дистанционноавтоматическом управлении разворотом агрегата в плоскости пласта происходит следующим образом.
Если необходимо «верхний конец базы остановить, а «нижний подать вперед на забой, то оператор размыкает ключ 2 и кратковременно замыкает к.:1юч установки в исходное положение 3. При этом во все управляющие блоки, за исключением верхнего концевого, записывается заданный щаг подачи. При срабатывании датчика 7 режима работы агрегата все электрогидроклапаны 28, за исключение.м верхнего концевого, открываются и агрегат (база) начинает перемещаться с разворото.м ни.кним концом вперед. В соответствии с описанием в пределе агрегат следует за линией задания 19, проходящей через крайние точки агрегата, так как именно срабатывание датчиков 20 выпуклости управляет включение.мотключением электрогидроклапанов, формированием и записью програ.ммы, приводящих к развороту агрегата в плоскости пласта. Аналогично устройство работает и при развороте агрегата вперед верхним концом.
Информацию об окончании выдвижки секций базы на забой (закрытие всех электрогидроклапанов) во всех описанных случаях подачи базы отображает индикатор 43. Эффективность от внедрения нового устройства выражена в повыщении производительности угледобывающего агрегата за счет сокращения потерь времени на выдвижку базы, путем повышения точности определения .мо.мента окончания выдвижки базы на забой. Характерно, что д.1я получения этой инфор.мации не требуется дополнительных магистральных линий связи, что, в свою очередь, не влияет на стоимость анпаратуры и на ее надежность и способствует расширению об, применения.
Формула изобретения
Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата по авт. св. Л9 757728, отличающееся тем, что, с целью повышения точности поддержания прямо,тинейности за счет обеспечения возможности контроля окончания выдвижки секций базы на забой, каждый управляюц ий б,пок снабжен К.ТЮЧОМ дешифратора максимума, ключом дешифратора нуля, дополнительным инвертором и дополнительной логической схемой ИЛИ, а блок дистанционного управления снабжен ключом состояний ЭГК, ключом запрета ГИ и индикатором окончания выдвижки базы, при этом выходы датчика ре° жима работы агрегата подключены соответственно через магистральную линию связи к управляюп им входам ключей дешифраторов нуля и через допо,тнительные инверторы к управ,чяющим входам ключей де, щифраторов максиму.ма, а информационные входы ключей дещифраторов ну,пя и ключей дешифраторов максимума соединены соответственно с выходами дешифраторов нуля и с выходами дешифраторов максимума, а выходы этих ключей дешифраторов 0 нуля и ключей дешифраторов .максим.;а соединер1ы с соответствующими входами дополнительных логических схем И,11-1, выходы которых через машстра.лып ю линию связи подключен1 1 к iiii4OiiMaс ционному входу ключа за:п1ета ГМ г; к информационному входу ключа coc xniiiin-: ЭГК, причем в блоке дистанционного ;iравления выходы датчика режима агрегата подключены соответственно к .прав,г1яюшему входу к.тюча состояний Э iv -i 0 через инвертор к управляющему BXO.IV i. iK;ча запрета ГИ, выход которого подкл -,1ь. ; через второй инвертор к вхату схе.мы vd ,падения.
Источники информации, принятые во вниман)С при эксперпгзо 1. Авторское свидете,1ьство СССР № 757728, кл. Е 21 D 23/00, 1976 (прототип.
8 7077 6 5 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1981 |
|
SU968454A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Способ автоматического управления выдвижкой секций базы угледобывающего агрегата и устройство для его осуществления | 1982 |
|
SU1052670A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1973 |
|
SU459757A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1974 |
|
SU600304A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1986 |
|
SU1382976A1 |
| Устройство для контроля положения объектов в очистном забое | 1989 |
|
SU1700231A1 |
| Цифровой многоинтегральный прибор для тензометрических весов | 1982 |
|
SU1030661A1 |
U2.1
