Известны преобразователи угла поворота вала в цифровой код барабанного типа. Одним из основных недостатков известных преобразователей является наличие ошибки, обусловленной несоосностью валов барабана и преобразователя, - ошибки эксцентриситета.
В предлагаемом преобразователе угла поворота вала в цифровой код барабанного типа для устранения ошибки преобразования применены две установленные диаметрально противоположно подвижные головки считывания, служащие для получения двух отсчетов преобразуемого угла с ошибками эксцентриситета разных знаков.
Для получения окончательного цифрового кода преобразуемого угла с компенсацией ошибки эксцентриситета в предлагаемом преобразователе применены две установленные диаметрально противоположно неподвижные головки считывания.
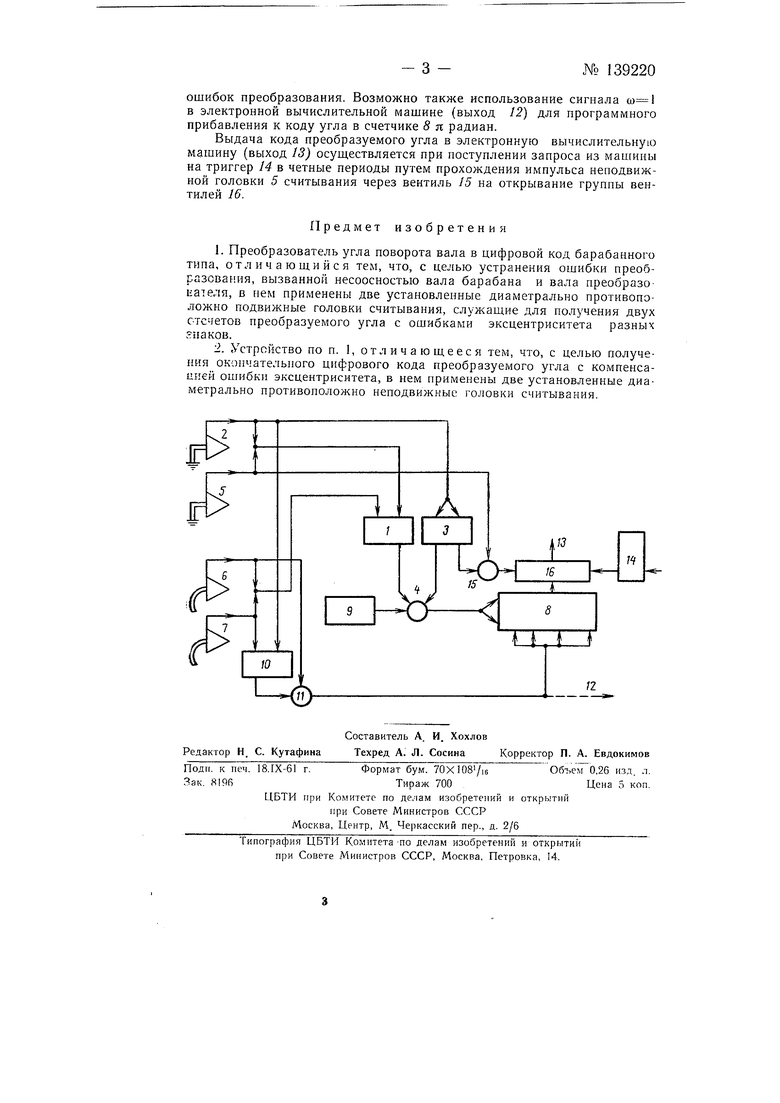
Функциональная схема описываемого преобразователя показана на чертеже.
При одновременном преобразовании углов «i и + 180° ошибки эксцентриситета в обоих отсчетах будут равны по абсолютному значению и противоположны по знаку. Тогда истинное значение преобразуемого угла равно:
- („,
где ai - первый отсчет преобразуемого угла; аа - второй отсчет преобразуемого угла. Иначе, если ошибка эксцентриситета равна +Аа, то
а (« + Аа)-Ь(Д--Аа-180°)-180°
№ л 39220 - 2 Для осуществления двух отсчетов углов, отличающихся друг от друга на л радиан, используется одна неподвижная головка считывания и две установленные диаметрально противоположно подвижные головки считывания.
В этом случае при преобразовании угла поворота вала больще, чем 180° в схеме преобразователя должен быть осуществлен одновременный отсчет и . Это обстоятельство требует применения в схеме двух элекРОВНЫХ счетчиков с емкостью кода первого отсчета в 360° и емкостью ко.ча второго отсчета 540°. Это приводит к значительному усложнению схемы и, кроме того, при применении двух электронных счегчиков Б преобразователе не получается окончательного кода преобразуемого угла.
В этом случае код преобразуемого угла может быть получен в электронной вычислительной машине путем решения выражения (1).
Для сокращения количества оборудования и для получения окончательного цифрового кода преобразуемого угла с компенсацией ощибки эксцентриситета в схеме преобразователя используется дополнительная неподвижная головка считывания, смещенная на я радиан относительно неподвижной головки, используемой и ранее.
Использование дополнительной неподвижной головки считывания позволяет осуществлять накацливание кода суммы двух отсчетов в одном счетчике емкостью не более 360° последовательно за два полупериода преобразования в течение одного цикла преобразования.
Для получения цифрового значения преобразуемого угла в электронном счетчике необходимо осуществить операцию деления содержимого счетчика на 2, так как а 2 Эта операция осуществляется в счетчике путем выдачи в электронную вычислительную мащину (п-1) старших разрядов кода суммы двух отсчетов.
Младший (первый) разряд в образовании кода не участвует, а второй разряд счетчика принимается за младший разряд кода преобразуемого угла.
Схема преобразователя функционирует следующим образом. Цикл преобразования начинается с поступления нат)эиггер / нечетного импульса с неподвижной головки 2 считывания. При этом триггер 3 со счетным входом переводится в состояние, при котором его открывающий потенциал подан на вентиль 4. Импульсы с неподвижной головки 5 считывания следуют спустя , полпериода после импульсов головки 2. Импульсы с подвижных головок 5 и 7 считывания имеют различное чередование в зависимости от величины преобразуемого угла. При преобразовании угла счетчик 8 заполняется счетными импульсами от генератора 9 импульсов в отрезки времени между поступлением импульсов от головок 2 R 6 и импульсов от головок 5 и 7. При преобразовании угла счетчик заполняется счетными импульсами в отрезки времени между поступлением импульсов от головок 2 и 7 w между импульсами от головок 5 и 5.
При преобразовании угла преобразователь вырабатывает сигнал (. Этот сигнал вырабатывается схемой, состоящей из триггера 10 и вентиля /У, и используется для записи в счетчик постоянного кода 180°.
Возможно использование сигнала и для записи переменного кода 180° в случае использования описываемого способа устранения ошибки эксцентриситета в сочетании со способами устранения других
у-1 f а.) 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВРЕМЕННОГО ИНТЕРВАЛА В ЦИФРОВУЮ ФОРМУ | 1972 |
|
SU327597A1 |
| Устройство для преобразования двоичного кода в двоично-десятичный | 1961 |
|
SU144642A1 |
| Устройство для преобразования статического кода Грея в двоичный код | 1960 |
|
SU137311A1 |
| МНОГОКАНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПАРАЛЛЕЛЬНОГО ДВОИЧНО-п-ИЧНОГО КОДА | 1973 |
|
SU387360A1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ДВОИЧНЫЙ КОД | 1970 |
|
SU282768A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU963034A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ | 1969 |
|
SU239408A1 |
| БИБЛИОТЕЬСА | 1971 |
|
SU289794A1 |
| Преобразователь двоичного кода в двоично-десятичный код угловых единиц | 1980 |
|
SU970354A1 |
