Предлагаемое изобретение относится к области измерительной техники - метрологии.
В настоящее время в РФ носителем наивысшей точности задания значения плоского угла является Государственный первичный эталон единицы плоского угла ГЭТ 22-80.
Государственный первичный эталон состоит из комплекса следующих средств измерений:
- интерференционного экзаменатора для воспроизведения единицы и передачи ее размера в области малых углов;
- угломерной автоколлимационной установки для передачи размера единицы;
- 12-гранной кварцевой призмы для контроля стабильности эталона.
Диапазон значений плоского угла, воспроизводимых эталоном, составляет 0÷360° с дискретностью 30°.
Государственный первичный эталон обеспечивает воспроизведение единицы со средним квадратическим отклонением результата измерений S, не превышающим 0,01ʺ при 132 совокупных относительных измерениях 12-гранной призмы. Неисключенная систематическая погрешность Θ не превышает 0,02ʺ. Основной режим работы - статический.
Можно считать, что выполнение основной функции Государственного эталона: воспроизведения и хранения единицы плоского угла, а также передача размера единицы при помощи вторичных эталонов и образцовых средств измерений рабочим средствам измерений, применяемым в народном хозяйстве с целью обеспечения в стране единства измерений, выполняется требуемым образом в доверительном интервале ±3S, что составляет ±0,03ʺ.
В это же время ряд зарубежных стран (например, Германия, Япония) перешли на принципиально иные эталоны единицы плоского угла, основанные на использовании круговых растров. Это позволило им добиться неопределенности воспроизведения, хранения единицы плоского угла и передачи размера единицы при помощи вторичных эталонов и образцовых средств измерений рабочим средствам измерений на уровне ±0,002ʺ. При воспроизводимости результатов не хуже ±0,001ʺ. Из этого следует, что метрологическое качество Государственного эталона единицы плоского угла РФ более чем на порядок хуже указанных выше зарубежных эталонов.
Выполненные в конце девяностых, начале двухтысячных годов работы по созданию нового первичного эталона единицы плоского угла, модели ГЭТ 94-01, на основе кольцевого лазера и фотоэлектрического растрового преобразователя угла, работающего в динамическом режиме, не привели к кардинальному решению проблемы повышения точности отечественного первичного эталона единицы плоского угла, т.к. государственный эталон модели ГЭТ 94-01 обеспечивает неопределенность воспроизведения, хранения единицы плоского угла на уровне ±0,04ʺ. При этом неисключенная систематическая погрешность Θ эталона не превышает 0,05ʺ. Т.е. новая модель Государственного эталона единицы плоского угла обеспечивает точность воспроизведения единицы угла как минимум в четыре раза хуже, чем старая модель. При этом передача размера единицы вторичным эталонам и образцовым рабочим средствам измерений осуществляется только в динамике и выполняется с неопределенностью ±(0,1…0,3)ʺ, что на порядок хуже, чем обеспечивается в старой модели в статическом режиме. Следовательно, проблема создания более точного первичного эталона единицы плоского угла остается для РФ актуальной.
Предлагаемое техническое решение ориентировано на создание эталона единицы плоского угла нового поколения с метрологическими параметрами, по крайней мере, не уступающими современным эталонам развитых стран. Практическая реализация этого решения позволит выполнять проблему сличения образцовых средств измерений с высокой точностью как в статическом, так и в динамическом режиме, что позволит также покончить с существующей зависимостью отечественных производителей, например новейших средств вооружений и военной техники от зарубежных эталонов в части прецизионной калибровки высокоточных средств измерений.
1. Естественным эталоном единицы плоского угла является полный оборот на 360°, а все действующие в настоящее время единицы измерения углов: радиан, градус, угловая минута, угловая секунда и их доли, являются производными единицами, образованными делением полного поворота на требуемый коэффициент.
Для воспроизведения этого естественного эталона требуется специальная метка «начало/конец оборота», которая формируется на термостабильном носителе, устанавливаемом на поворотном столе. Стабильность воспроизведения в пространстве положения метки «начало/конец оборота» напрямую зависит от стабильности положения в пространстве оси вращения ротора поворотного стола эталона. Если подшипники поворотного стола допускают биение оси вращения ротора, равное ε, то угловая нестабильность δϕ положения метки «начало/конец оборота», установленной на расстоянии R от оси вращения ротора, составит
здесь ε задана в мкм, R в метрах, а δϕ оценивается в угловых секундах.
Например, если в эталоне используется аэростатический подшипник с биением оси ε=0,1 мкм, а метка «начало/конец оборота» сформирована на расстоянии R=0,1 м, то угловая нестабильность положения метки составит δϕ=0,2ʺ, что в двадцать раз хуже, чем обеспечивается воспроизведение угла Государственным эталоном ГЭТ 22-80. Чтобы приблизиться к параметрам, обеспечиваемым ГЭТ 22-80, необходимо либо уменьшить ε в двадцать раз (т.е. довести биения ротора до 5 нм), что весьма непросто, либо увеличить радиус записи метки «начало/конец оборота» до 2 метров. В этом случае масса кварцевого диска таких габаритов не позволит обеспечить стабильность подшипника на уровне ε=0,1 мкм. Т.е. проблема стабильности воспроизведения в пространстве положения метки «начало/конец оборота» не решается «в лоб».
Указанные особенности хорошо изучены в технике производства угловых преобразователей, используемых при измерении угла поворота с помощью радиального растра и одной считывающей головки, выходные сигналы которой передают в блок обработки, в котором накапливают интегральную сумму, пропорциональную углу поворота (см., например, «Фотоэлектрические преобразователи информации». М.: «Машиностроение», 1974, под редакцией д.т.н., проф. Л.Н. Преснухина). Основным способом снижения погрешности преобразования в этом случае является применение принципа путевого усреднения (см., например, В.Ф. Ионак «Приборы кинематического контроля». М.: «Машиностроение», 1981, 129 с.). Способ реализуется путем использования нескольких дополнительных считывающих головок, однотипных с основной головкой и расположенных по кругу с равным шагом, выходные сигналы которых суммируют с выходным сигналом основной головки.
Так, если используется только одна дополнительная считывающая головка, расположенная диаметрально противоположно основной, то в результате сложения их выходных сигналов в суммарном сигнале происходит подавление всех нечетных гармоник погрешности, вызванной эксцентриситетом установки растра на валу, биениями подшипников вала и неточностью изготовления самого растра.
Однако этот метод не обеспечивает снижения указанных выше факторов, дестабилизирующих стабильность положения в пространстве метки «начало/конец» оборота. Поэтому для обеспечения этой стабильности применяют известный прием синхронизации сигнала «начала/конца» оборота (см., например, B.C. Гутников, «Интегральная электроника в измерительных устройствах». Л.: «Энергоатомиздат», Ленинградское отделение, 1988. 304 с.), при котором сигнал, выработанный головкой считывания сигнала «начала/конца» оборота, используется для инициализации т.н. «триггера-защелки», с помощью которого выделяется ближайший импульс, сформированный из суммарного сигнала считывающих головок радиального растра, и который принимается теперь за сигнал «начала/конца» оборота. Положение этого сигнала не подвержено возмущающему действию эксцентриситета, хотя остается дестабилизирующее влияние остаточных гармоник кривой погрешности, вносимых неточностью изготовления растра и биениями подшипников.
Дальнейшее повышение стабильности в пространстве метки «начала/конца» оборота достигается за счет снижения вклада гармоник с более высокими номерами за счет увеличения числа считывающих сигналы растра головок (См., например, T. Masuda, М. Kajitani. «An automatic calibration system for angular encoders». «Precision Engineering», vol. 11, No 2, 1989, p. 95).
Рекомендации о количестве используемых считывающих головок приведены, например, в работе (Т. Watanabe, Н. Fujimoto, K. Nakayama, Т. Masuda, М. Kajitani. «Automatic high precision calibration system for angle encoder» II. Proc SPIE, 2003; 5190: 400-9).
И, наконец, предельный переход от конечного числа считывающих головок к регулярному множеству считывающих элементов, равному числу штрихов в радиальном растре, сделан в монографии (Л.Н. Преснухин, В.Ф. Шаньгин, Ю.А. Шаталов «Муаровые растровые датчики положения и их применение», стр. 195), в которой приводится описание функциональной схемы делительного устройства для производства кодирующих дисков с управлением от муарового сигнала, усредненного по всей окружности эталонного диска. Эталонный (референтный) датчик этой установки собран на основе двух растров с одинаковым числом штрихов. Утверждается, что оптическая система датчика «…собирает свет со всей кольцеобразной поверхности обоих растров на один фотоприемник. Синусоидальный сигнал, снимаемый с интегрирующего фотоприемника, практически свободен от фазовой ошибки, связанной с погрешностями положения штрихов обоих растров».
Если применить выводы, сделанные в работах японских авторов, к заключению, сделанному на 195 стр. монографии Л.Н. Преснухина и др., то можно считать, что интегральное считывание позволяет подавить влияние всех (2n-1) первых гармоник спектра погрешности преобразования угла, где 2n - число штрихов растра. Тогда в таких преобразователях погрешность преобразования будет определяться только остаточным вкладом гармоники с номером 2n.
В представленной заявке на изобретение предлагается техническое решение, в котором используется интегральное считывание информации одновременно со всех штрихов растрового сопряжения для создания эталона единицы плоского угла нового поколения.
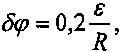
Физическим носителем эталона единицы плоского угла является диск из кварцевого стекла 1 (см. фиг. 1), установленный на прецизионную ось 2. На диске за единый технологический цикл последовательно в направлении от центра диска к периферии нанесены структуры эталона: метка «начало/конец оборота» 3, первый растр (синхронизирующий) 4 и второй растр (интерполирующий) 5.
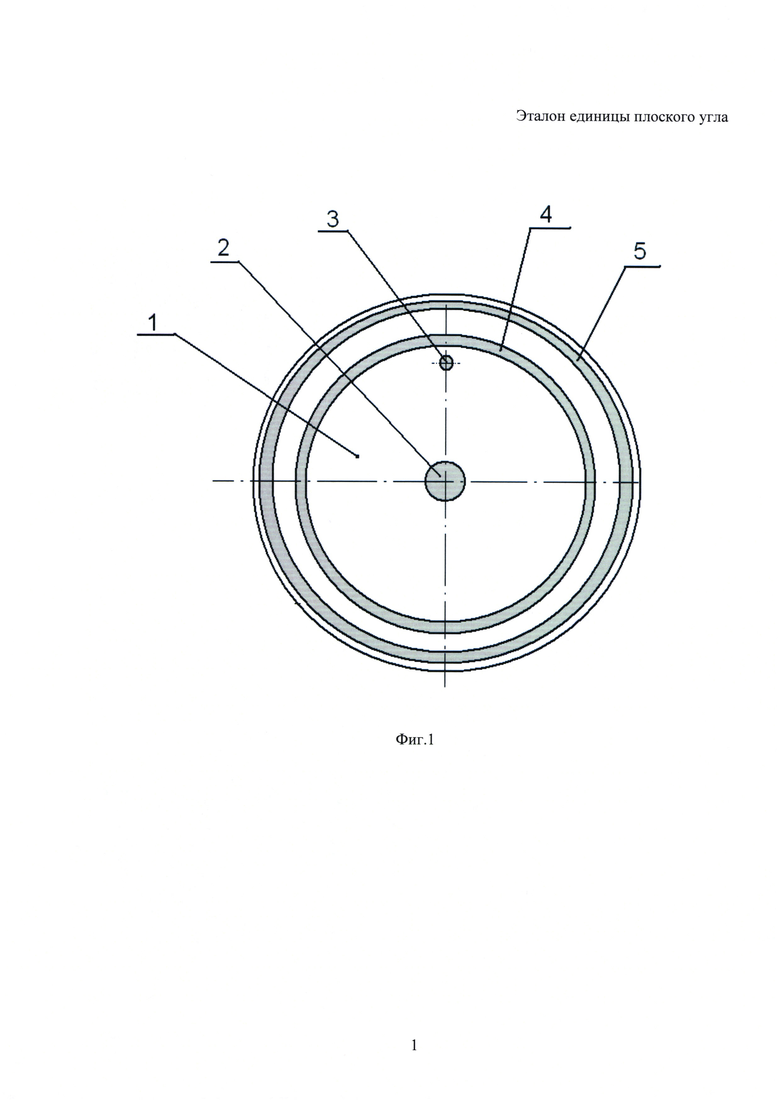
Под кварцевым диском 1 установлены (см. фиг. 2): осветитель метки «начало/конец оборота» 6, кольцевой осветитель 6 первого растра (синхронизирующего) 4 и осветитель 14 второго растра (интерполирующего) 5.
Над кварцевым диском 1 установлены: диск индикаторный 7, фотоприемник 11 метки «начало/конец оборота», который с помощью формирователя 17 создает первый (основной) информационный выход 18 эталона единицы плоского угла, два фотоприемника 12 первого растра (синхронизирующего), подключенные ко входам формирователя 16, создающего второй информационный выход 19 эталона, и система 13 считывания данных со второго растра (интерполирующего) 5, которая формирует информационные выходы 20 растра интерполирующего 5.
Метка «начало/конец оборота» 3 может быть сформирована по-разному, например, в виде протяженной щели, либо в виде структуры, получившей название «случайной маски», либо в виде фокусирующей структуры типа линзы Френеля. В соответствии с выбором типа метки «начало/конец оборота» 3 на рабочей поверхности диска индикаторного 7 нанесена соответствующая структура, сопрягаемая со сформированной на диске 1 меткой «начало/конец оборота»: щель, случайная маска, идентичная структуре метки «начало/конец оборота» на кварцевом диске, или круглая диафрагма, соответственно. На фиг. 2 метка «начало/конец оборота» 3 представлена как фокусирующая структура типа линзы Френеля. Поэтому на диске индикаторном 7 сформирована диафрагма 10 диаметром не менее 1,5 периодов растра 4.
Конструкция заявляемого эталона единицы плоского угла обеспечивает интегральное считывание информации одновременно со всех штрихов растра 4. Для этого используется круговой осветитель 6 и считывание информации с растра 4 осуществляется с помощью растрового сопряжения обтюрационного типа (РСОТ), позволяющего получить синхронную модуляцию световых потоков во всех «окнах» растрового сопряжения. Известно, что РСОТ характеризуются функцией пропускания Праст следующего вида (см. «Фотоэлектрические преобразователи информации». М.: «Машиностроение», 1974, под редакцией д.т.н., проф. Л.Н. Преснухина, стр. 163):

Функция пропускания Прас разлагается в ряд Фурье, содержащего только нечетные гармоники. Эта функция пропускания характеризуется треугольной формой зависимости интенсивности проходящего света от взаимного положения растров в пределах одного периода.
Для повышения отношения «сигнал-шум» при регистрации сигналов с РСОТ кольцевой осветитель 6 должен обладать малой пространственной и временной когерентностью. По этой причине целесообразно его выполнять, например, электролюминесцентного типа.
Известно также, что фотоприемники, используемые для регистрации оптических сигналов, обладают квадратичной характеристикой, что приводит к увеличенной чувствительности к искажениям фазы переменной составляющей от случайных флуктуаций интенсивности освещающего излучения. Поэтому в растровых угловых датчиках формируют пары измерительных сигналов (прямой и смещенный на 180°), чтобы после их вычитания устранить постоянную составляющую в сигналах и регистрировать моменты прохода текущего значения выходного сигнала через нулевой уровень, что существенно повышает стабильность измерения фазы сигналов.
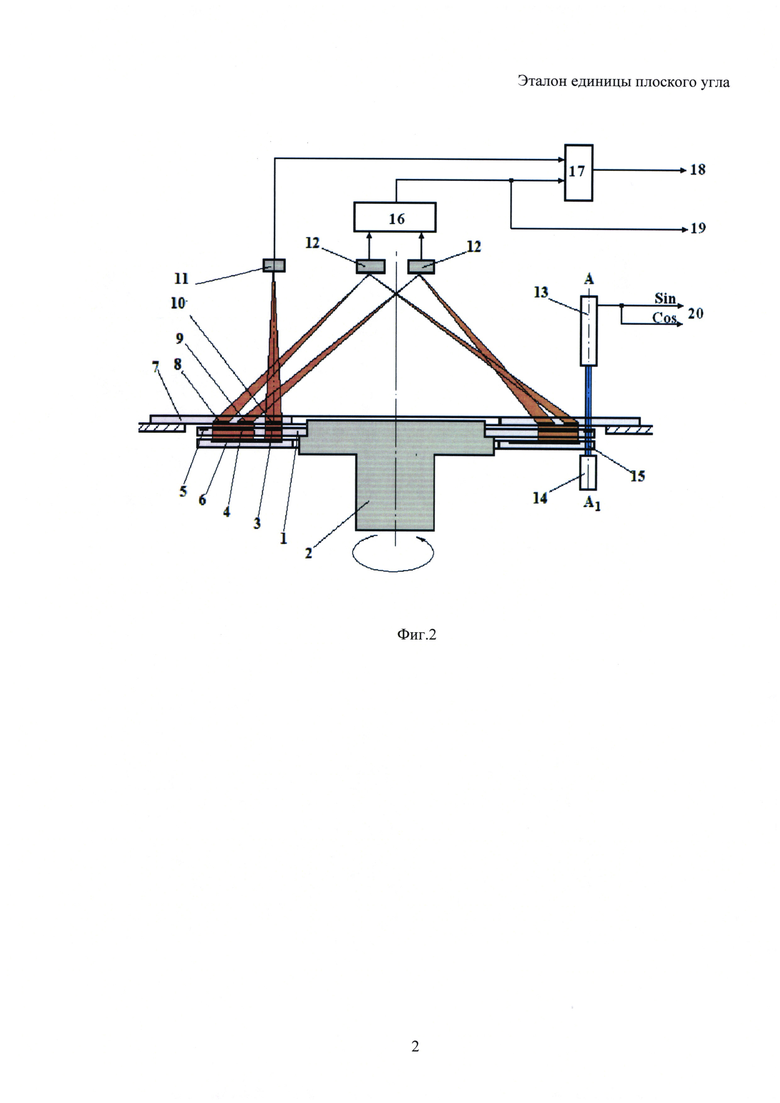
При треугольной форме выходных сигналов искажения фазы линейно связаны с флуктуациями интенсивности освещающего излучения. Поэтому в данной заявке интегральное считывание производится с помощью двух кольцевых структур 8 и 9 (фиг. 2), сформированных на рабочей поверхности диска индикаторного 7 и образующих с растром синхронизирующим 4 два РСОТ, сдвинутых по фазе относительно друг друга на 180° (фиг. 3). Для выделения этих сигналов в окнах кольцевых структур 8 и 9 диска индикаторного 7 нанесены сегменты внеосевых линз Френеля 21 (см. фиг. 3), фокусирующие излучение, проходящее через окна кольцевых структур, на фотоприемники 12 растра синхронизирующего 4. На фиг. 3 РСОТ представлено не полностью, а в виде фрагмента, включающего части диска кварцевого 1 и диска индикаторного 7.
Оба фотоприемника 12 подключены к формирователю 16 информационных сигналов растра синхронизирующего, выход которого является вторым информационным выходом 19 эталона единицы плоского угла. Кроме того, он соединен со вторым входом блока синхронизации 17, первый вход которого соединен с выходом фотоприемника 11, а выход блока 17 представляет собой основной информационный выход 18 эталона единицы плоского угла.
Оценим, с какой угловой неопределенностью воспроизводится выходной сигнал основного информационного выхода 18 эталона единицы плоского угла и второго информационного выхода 19 в соответствии с предлагаемой конфигурацией эталона единицы плоского угла. Примем, что растр 4 (синхронизирующий) сформирован на кварцевом диске 1 на диаметре, равном 100 мм, и имеет 1024 штриха (210). Предположим также, что растр записан с помощью технологического комплекса, характеризующегося фактором нестабильности F, равным, например, 0,218 мкм (относительно фактора нестабильности F см. Кирьянов В.П., Кирьянов А.В. «Улучшение метрологических характеристик лазерных генераторов изображений с круговым сканированием», «Автометрия», 2010, т. 46, №5, с. 77-93). Этот показатель используется для оценки точности формирования топологии углоизмерительных структур, например растров, шкал, лимбов, изготавливаемых с помощью данного комплекса. Т.к. фактор нестабильности F, погрешность изготовления растра δизг и диаметр изготавливаемого растра D связаны между собой следующим соотношением:
F=2,42⋅δизг⋅D,
где δизг - представлена в угловых секундах, а диаметр D - в метрах, то в соответствии с этим выражением при значении параметра F=0,218 мкм погрешность изготовления - δизг растра, диаметром D=100 мм, на данном комплексе не будет превышать 0,9 угл.с.
Как указывалось выше, при использовании интегрального считывания информации с растра 4 погрешность преобразования будет определяться только остаточным вкладом гармоники с номером 1024. Чтобы оценить количественно вклад гармоники с номером 1024 в результат формирования сигналов на выходах 19 и 20 эталона, воспользуемся характеристиками конкретного технологического комплекса, фактор нестабильности F=0,218 мкм которого был использован для оценки погрешности изготовления растра, а именно лазерного генератора изображений CLWS-300 (выпуска 2001 года). Для этого комплекса на основе обмера погрешностей ряда изготовленных с его помощью растров были получены усредненные данные, касающиеся распределения относительных вкладов q («веса») пространственных гармоник в спектрах кривых погрешности круговых растров и шкал, изготовленных с его помощью. Данные сведены в таблицу 1:

Тогда значение остаточной погрешности δост может быть оценено как
δост=δ1024=δизг⋅q=0,9⋅0,8⋅10-5=0,00007 угл.с.
На диаметре 100 мм угловому сектору размером 0,7⋅10-5 угл.с, характеризующему пространственную неопределенность каждого из импульсных сигналов, сформированных на выходах 19 и 20 растра 4 (синхронизирующего), соответствует дуга, длина которой соответствует 1,8⋅10-12 м. При скорости вращения растра порядка 0,1 об/с (наиболее часто используемой в стандартах угла) этой дуге соответствует временной интервал, равный 18 нс, который соизмерим и даже меньше длительности фронтов пороговых элементов современных электронных схем в блоках обработки сигналов преобразователя. Т.е. можно ожидать, что реальная пространственная нестабильность положения импульсных сигналов на выходах 18 и 19 при скорости вращения растра 0,1 об/с будет определяться в основном шумами электронных схем и не будет превышать δост=±0,7⋅10-4 угл.с.
Это значение угловой неопределенности сигнала на основном информационном выходе 18 эталона единицы плоского угла является наиболее вероятной оценкой его ожидаемого метрологического качества. Оно, как минимум, на порядок меньше неопределенности действующих в РФ эталонов единицы плоского угла.
Для того чтобы передать с этой точностью требуемые значения углов вторичным эталонам и образцовым рабочим средствам измерений, необходимо иметь технические средства задания любого угла в пределах 360° с такой же неопределенностью, причем как в режиме статических сличений, так и динамических.
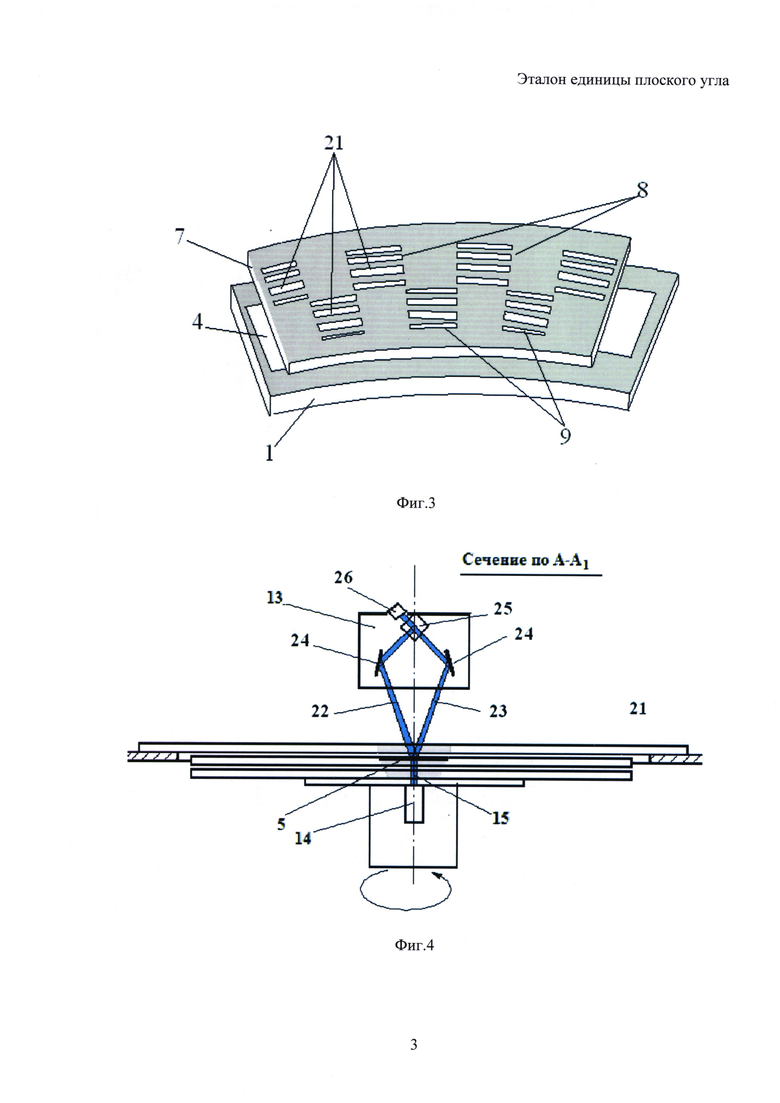
Для реализации режима статических сличений на рабочей поверхности кварцевого диска нанесен второй растр 5 (интерполирующий), представляющий собой дифракционную решетку с радиальной ориентацией штрихов, информация с которого считывается с помощью специальной системы 13, выполненной в виде дифракционного интерферометра (на фиг. 4 - это элементы 24, 25, 26), работающего с первыми дифракционными порядками 22 и 23 излучения 15, освещающего растр 5. С помощью оптических элементов 24 и 25 выделенные (первые) порядки приводятся к интерференции на рабочей поверхности фотоприемников 26 интерферометра, формирующих квадратурные выходные сигналы 20 интерферометра.
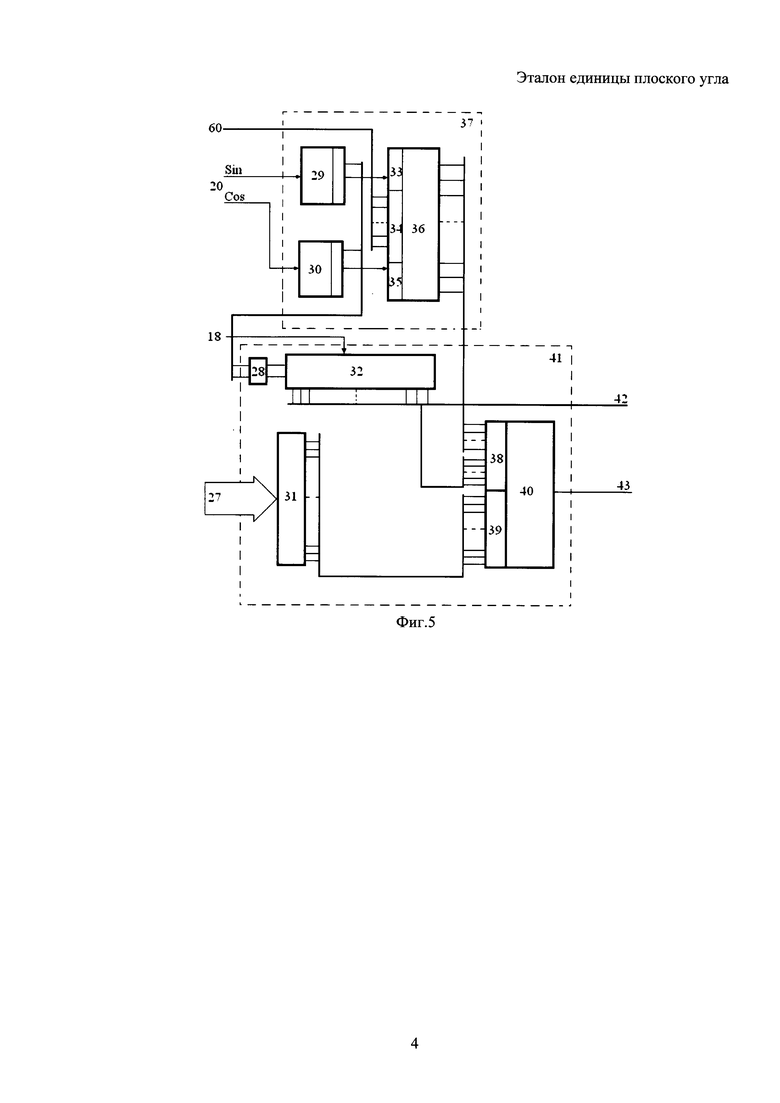
Функциональная схема блока внутришаговой интерполяции 37, используемого для регистрации фазы квадратурных сигналов растра 5 (интерполирующего), представлена на фиг. 5. Она включает в себя процессор 36 и два аналого-цифровых преобразователя (АЦП) (29 и 30), аналоговые входы которых подключены к квадратурным выходам 20 дифракционного интерферометра 13, а цифровые выходы подключены ко входам 33 и 35 процессора 36.
Система 41 статических сличений произвольных значений угла с эталоном состоит из регистра 31, хранящего код 27 сличаемого угла, реверсивного счетчика 32 штрихов растра 5 (интерполирующего) с блоком 28 формирования счетных импульсов и цифрового компаратора 40. Компаратор 40 имеет два набора цифровых входов 38 и 39. Младшие разряды входов 38 подключены к выходам процессора 36, а старшие - к выходам реверсивного счетчика 32. Выход 43 компаратора 40 представляет собой первый дополнительный информационный выход эталона, передающий факт достижения заданного угла поворота ротора эталона заданного угла и используемый для сличения заданных произвольных значений углов в статическом режиме.
Можно оценить, с каким угловым разрешением могут производиться сличения углов в статическом режиме.
Пусть второй растр 5 (интерполирующий) нанесен на кварцевом диске 1 на диаметре 105 мм. Штрихи на этом растре нанесены с периодом 1,25 мкм. Всего нанесено штрихов -262 144 (218). В дифракционном интерферометре 13 происходит удвоение числа периодов квадратур по отношению к числу периодов растра, т.е. формируется 219 периодов квадратур на один оборот растра. В блоке внутришаговой интерполяции 37, регистрирующем фазы квадратурных сигналов растра 5 интерполирующего разрешения по фазе, повышается за счет использования арктангенсного алгоритма вычисления фазы квадратур. Число разрешаемых положений по фазе полностью определяется разрядностью используемых АЦП 29 и 30. Если АЦП 29 и 30, например, 16-разрядные, то процессор 36 обеспечит вычисление фазы с разрешением до 2-16, что позволит реализовать разрешение по углу в статическом режиме равным 2-35 (2-(19+16)) от полного оборота или порядка 0,4⋅10-4 угловой секунды. Подобное разрешение вполне однозначно соответствует угловой неопределенности, обеспечиваемой системой на выходах 18 и 19 эталона.
2. Однако нетрудно убедиться в том, что второй растр 5 совместно с дифракционным интерферометром 13 можно рассматривать как классический инкрементальный угловой преобразователь с одной считывающей головкой. Известно, что выходной сигнал подобных преобразователей угла подвержен искажающему воздействию многих источников, в т.ч. влиянию эксцентриситета установки растра на оси, биению подшипников оси, неточности формирования топологии измерительного растра преобразователя и т.д. Поэтому для обеспечения возможности использования его в составе эталона единицы плоского угла, обеспечивающего угловую неопределенность на уровне 0,7⋅10-4 угловой секунды, должны быть предусмотрены специальные средства, позволяющие в данном преобразователе скомпенсировать до требуемого уровня искажающий вклад указанных выше причин.
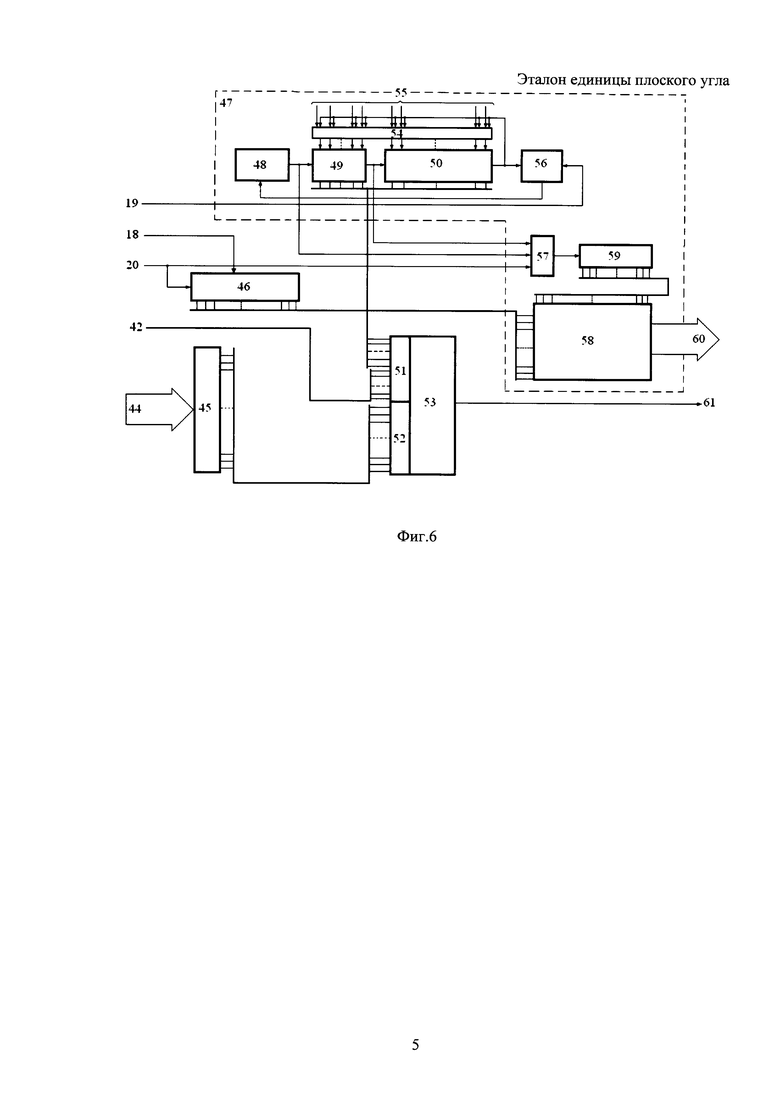
Для этого в состав эталона единицы плоского угла введена (см. фиг. 6) система 47 самокалибровки растра 5 (интерполирующего), состоящая из системы фазовой автоподстройки частоты (ФАПЧ) (элементы 48, 49, 50, 54 и 56), узла 57 выделения систематической составляющей погрешности растра интерполирующего и блока памяти 58, в котором хранятся данные о погрешности углового положения каждого штриха растра 5 (интерполирующего).
Система ФАПЧ состоит из фазового детектора 56, счетчиков 49 и 50 с управляемым коэффициентом деления 55 и генератора частоты 48, управляемого напряжением (ГУН) с выхода фазового детектора 56. При этом один вход фазового детектора 56 подключен к выходу счетчика 50 с управляемым коэффициентом деления, а второй - к информационному выходу 19 растра 4 (синхронизирующего). В системе ФАПЧ сигналы на выходе счетчика 50 точно совпадают по частоте и фазе с сигналами на выходе 19 растра синхронизирующего 4. Это позволяет разместить между каждыми соседними импульсами, поступающими с выхода 19, одинаковое число импульсов с выхода ГУН. В данной схеме оно равно коэффициенту деления счетчиков 49, 50. Это число задается кодом 55. Если счетчик с управляемым коэффициентом деления разбить на две части (счетчик 49 и счетчик 50) так, чтобы коэффициент деления счетчика 50 был точно равен отношению числа штрихов растра 5 интерполирующего к числу штрихов растра 4 синхронизирующего, то число импульсов с выхода счетчика 49 точно совпадет с числом штрихов растра 5 (интерполирующего). Но фаза импульсов на выходе счетчика 49 не будет совпадать с фазой импульсов на выходе 20 растра 5 (интерполирующего). Это расхождение регистрируется с помощью детектора 57, на первый вход которого подан сигнал с выхода счетчика 49, на второй вход - с выхода 20 дифракционного интерферометра и третий вход подан сигнал с выхода ГУН. Каждое зарегистрированное расхождение по фазе является мерой неточности положения в пространстве конкретных штрихов растра 5 (интерполирующего). Неточность положения каждого штриха растра 5 интерполирующего можно измерить с высоким разрешением, если в счетчике 49 задать достаточно большой коэффициент деления, например 212, 213, … или 216. Код ошибки пространственного положения каждого штриха растра 5 формируется на выходе счетчика 59, подключенного к выходу детектора 57. Эти коды запоминаются в блоке памяти 58 и считываются с помощью шины данных 60 на вход 34 процессора 36. Соответствие кодов ошибок, снимаемых с выхода счетчика 59, нужному штриху растра 5 устанавливается с помощью счетчика 46, счетный вход которого подключен к выходу 20 растра интерполирующего, а вход «Сброс в 0» - к основному информационному выходу 18 эталона. Выход счетчика 46 формирует сигналы управления адресными шинами блока памяти 58.
Можно оценить, с каким угловым разрешением регистрируются отклонения пространственного положения штрихов растра 5 интерполирующего. Пусть счетчик 59 имеет емкость 216, тогда в счетчике 59 регистрируются данные об угловых отклонениях с разрешением до 2-16 от периода квадратур или 2-35 от полного оборота. Последнее точно совпадает с достигнутым разрешением, равным 0,4⋅10-4 угловой секунды, в электронной системе 37 регистрации фазы квадратурных сигналов растра 5.
3. Наличие системы ФАПЧ, синхронизируемой сигналами 19 с выхода растра 4, позволяет выполнять операцию сличения углов также и в динамическом режиме, например, с помощью второго цифрового компаратора 53. Для этого по шине данных 44 в регистр 45 передают код угла, на который относительно метки «начало/конец оборота» 3 должен повернуться ротор 2 поворотного стола эталона. Выходы регистра 45 соединены со вторыми входами 52 цифрового компаратора 53, первые входы которого соединены с выходами счетчиков 32, 49 и 50. При этом младшие разряды первого входа цифрового компаратора соединены с выходами счетчиков 49 и 50, а старшие разряды через шину данных 42 - к выходам счетчика 32, регистрирующего число штрихов растра 4 (синхронизирующего). Момент совпадения текущего значения кода угла поворота ротора с заданным в регистре 45 значением угла отмечается появлением сигнала на выходе компаратора 53, который передается на выход 61, представляющий второй дополнительный (динамический) информационный выход эталона.
Оценим разрешающую способность измерительной системы предлагаемого эталона единицы плоского угла в динамическом режиме передачи или сличения углов. Пусть, как уже указывалось, второй растр 5 (интерполирующий) нанесен на кварцевом диске 1 на диаметре 105 мм. Штрихи на этом растре нанесены с периодом 1,25 мкм. Всего штрихов - 262144 (218). Коэффициент деления счетчика 50 должен быть установлен равным 28. В счетчике 49 установим коэффициент деления 214. Число импульсов на выходе ГУН 48 за один оборот ротора составит величину, равную 28+14+10=232 (или 4294967296), что соответствует разрешающей способности эталона порядка ≈0,3⋅10-3 угловой секунды. При скорости вращения ротора порядка 0,1 об/с частота сигналов на выходе ГУН 48 составит 429 МГц, что на современной элементной базе микроэлектроники является вполне реализуемым показателем. Однако оцениваемый показатель, характеризующий разрешающую способность измерительной системы предлагаемого эталона единицы плоского угла в динамическом режиме передачи или сличения углов, оказывается на порядок грубее аналогичного показателя в статическом режиме. Однако он на три десятичных порядка точнее, чем аналогичный показатель действующего эталона ГЭТ 94-01.
Относительно реализуемости предложенных в заявке технических решений.
1. Запись в едином технологическом процессе топологических структур предлагаемого эталона на кварцевом диске не представляет серьезных затруднений, т.к. существующие в Институте технологии и оборудование позволяют успешно выпускать прецизионные дифракционные оптические элементы на кварцевых дисках большого диаметра.
2. Повышение разрешающей способности в динамическом режиме измерений за счет применения систем с ФАПЧ давно используется в Институте при создании лазерных генераторов изображений моделей: CLWS-300, КЛЗС, «Видеодиск» и др. В настоящее время в Институте созданы экспериментальные образцы устройств с ФАПЧ с тактовой частотой до 2 ГГц.
3. Использование таких специфических средств, как оптические интерферометры, практикуется в Институте уже несколько десятилетий, начиная с конца шестидесятых годов.
Все это указывает на реализуемость в РФ предлагаемых технических решений для создания эталона единицы плоского угла нового поколения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ построения углового преобразователя абсолютного типа | 2016 |
|
RU2634329C1 |
| СПОСОБ КАЛИБРОВКИ УГЛОВОГО ДАТЧИКА | 2015 |
|
RU2592734C1 |
| Способ угловых измерений | 2021 |
|
RU2782353C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| Устройство для измерения угла поворота вала | 1990 |
|
SU1772629A1 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПАРЫ МЕТРОЛОГИЧЕСКИХ ГОЛОГРАФИЧЕСКИХ ДИФРАКЦИОННЫХ РЕШЕТОК ТУРУХАНО | 1988 |
|
SU1814406A1 |
Изобретение относится к области измерительной техники - метрологии - и может быть использовано при создании эталона единицы плоского угла нового поколения с улучшенными метрологическими показателями по сравнению с ныне действующими в РФ первичными эталонами. Предложенный эталон единицы плоского угла содержит прозрачный кварцевый носитель, на котором последовательно в направлении от центра диска к периферии нанесены: метка «начало/конец оборота», первый растр (синхронизирующий) и второй растр (интерполирующий), кроме него в состав эталона входят: осветитель метки «начало/конец оборота», кольцевой осветитель первого растра (синхронизирующего) и осветитель второго растра (интерполирующего), диск индикаторный, фотоприемник метки «начало/конец оборота», два фотоприемника первого растра (синхронизирующего), и система считывания данных со второго растра (интерполирующего), при этом на рабочей поверхности диска индикаторного нанесены: структура, сопрягаемая со структурой метки «начало/конец оборота», и две кольцевые структуры, образующие с первым растром (синхронизирующим) два растровых сопряжения обтюрационного типа, сдвинутые по фазе относительно друг друга на 180°, причем в окнах кольцевых структур диска индикаторного нанесены сегменты внеосевых линз Френеля, фокусирующих излучение, проходящее через эти окна, на соответствующие фотоприемники первого растра (синхронизирующего); второй растр (интерполирующий) выполнен в виде дифракционной решетки с радиальной ориентацией штрихов, а система считывания информации со второго растра (интерполирующего) выполнена, соответственно, в виде дифракционного интерферометра, выделяющего первые дифракционные порядки излучения. Основным выходом эталона единицы плоского угла является выход формирователя, входы которого соединены с выходом фотоприемника метки «начало/конец оборота» и выходами фотоприемников растра (синхронизирующего». В составе эталона предусмотрена система сличений произвольных углов в статическом режиме работы эталона единицы плоского угла, состоящей из первого цифрового компаратора, счетчика штрихов второго растра (интерполирующего) и блока внутришаговой интерполяции. Кроме того, в составе эталона единицы плоского угла предусмотрены: система самокалибровки второго растра (интерполирующего) и система сличений произвольных углов в динамическом режиме работы эталона единицы плоского угла, содержащая второй цифровой компаратор. Технический результат - повышение метрологического качества единицы плоского угла. 3 н.п. ф-лы, 6 ил.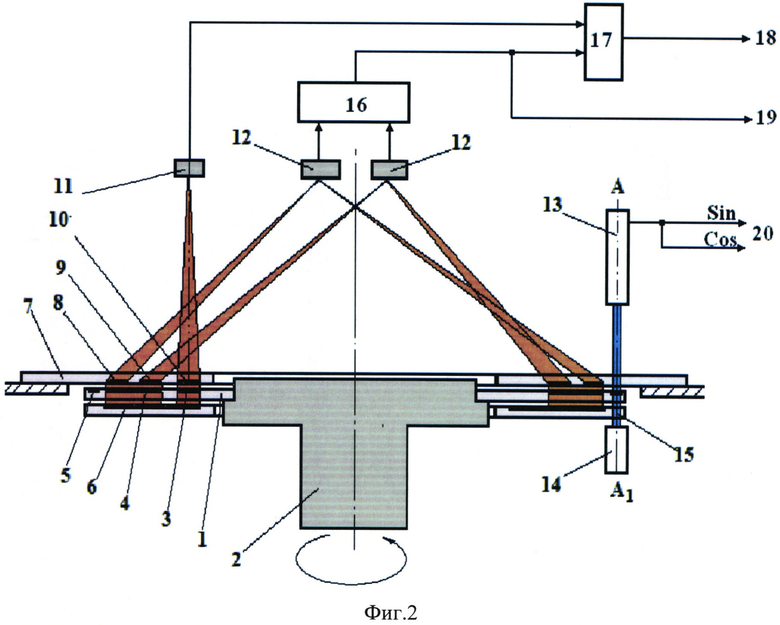
1. Эталон единицы плоского угла, содержащий закрепленный на роторе шпиндельного узла эталона прозрачный кварцевый диск, на рабочей поверхности которого последовательно в направлении от центра диска к периферии нанесены структуры эталона: метка «начало/конец оборота», первый растр (синхронизирующий) и второй растр (интерполирующий); систему самокалибровки второго растра (интерполирующего) и систему сличений произвольных углов в динамическом режиме работы эталона, при этом под кварцевым диском установлены: осветитель метки «начало/конец оборота», кольцевой осветитель первого растра (синхронизирующего) и осветитель второго растра (интерполирующего), над кварцевым диском установлены: диск индикаторный, фотоприемник метки «начало/конец оборота», два фотоприемника первого растра (синхронизирующего), и система считывания данных со второго растра (интерполирующего), при этом выход фотоприемника метки «начало/конец оборота» соединен с первым входом формирователя первого информационного выхода эталона единицы плоского угла, а выходы двух фотоприемников первого растра соединены со входами формирователя второго информационного выхода эталона, соединенного также со вторым входом формирователя первого информационного выхода эталона, кроме того, на рабочей поверхности диска индикаторного нанесены: структура, сопрягаемая со структурой метки «начало/конец оборота», и две кольцевые структуры, образующие с первым растром (синхронизирующим) два растровых сопряжения обтюрационного типа, сдвинутые по фазе относительно друг друга на 180°, причем в окнах кольцевых структур диска индикаторного нанесены сегменты внеосевых линз Френеля, фокусирующих излучение, проходящее через эти окна, на соответствующие фотоприемники первого растра (синхронизирующего); второй растр (интерполирующий) выполнен в виде дифракционной решетки с радиальной ориентацией штрихов, а система считывания информации со второго растра (интерполирующего) выполнена, соответственно, в виде дифракционного интерферометра, выделяющего первые дифракционные порядки излучения, освещающего второй растр (интерполирующий), которые с помощью оптических элементов приводятся к интерференции на рабочей поверхности фотоприемников интерферометра, формирующих квадратурные выходные сигналы интерферометра, используемые в системе сличений произвольных углов в статическом режиме работы эталона единицы плоского угла, состоящей из первого цифрового компаратора, счетчика штрихов второго растра (интерполирующего) и блока внутришаговой интерполяции, содержащего процессор и два аналого-цифровых преобразователя, подключенных к выходам системы считывания данных со второго растра (интерполирующего), при этом выходы аналого-цифровых преобразователей подключены ко входам процессора, вычисляющего фазу выходных сигналов дифракционного интерферометра, а выходы процессора подключены к первым входам младших разрядов первого цифрового компаратора, первые входы старших разрядов которого подключены к выходам счетчика штрихов второго растра (интерполирующего), а вторые входы первого цифрового компаратора подключены к выходам регистра, хранящего код угла поворота ротора шпинделя, задаваемого в ходе процедуры сличения углов, при этом выход первого цифрового компаратора является первым дополнительным информационным выходом эталона, используемым для сличений углов в статическом режиме.
2. Система самокалибровки второго растра (интерполирующего), встроенная в состав эталона единицы плоского угла и состоящая из узла фазовой автоподстройки частоты (ФАПЧ), узла выделения систематической составляющей погрешности растра интерполирующего и блока памяти, в котором хранятся данные о погрешности углового положения каждого штриха растра интерполирующего, при этом адресные шины блока памяти соединены с выходами счетчика штрихов второго растра (интерполирующего), первый вход фазового детектора ФАПЧ соединен с втором информационным выходом эталона, а второй - с выходом переносов счетчика с управляемым коэффициентом деления, причем значение коэффициента деления счетчика устанавливается кратным отношению числа штрихов второго растра (интерполирующего) к числу штрихов первого растра (синхронизирующего).
3. Система сличений произвольных углов в динамическом режиме работы эталона единицы плоского угла, встроенная в состав эталона единицы плоского угла, содержащая второй цифровой компаратор, первые входы младших разрядов которого подключены к выходам счетчика с управляемым коэффициентом деления, а первые входы его старших разрядов подключены к выходам счетчика штрихов первого растра (синхронизирующего), причем вторые входы цифрового компаратора подключены к выходам регистра, хранящего код выделяемого в ходе процедуры сличения угла поворота ротора шпинделя, при этом выход второго цифрового компаратора является вторым дополнительным информационным выходом эталона, используемым для сличений в динамическом режиме.
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| СПОСОБ КАЛИБРОВКИ ГРУППЫ СРЕДСТВ ИЗМЕРЕНИЙ ПЛОСКОГО УГЛА С СУММАРНЫМ ДИАПАЗОНОМ ШКАЛ НЕ МЕНЕЕ 360° | 2007 |
|
RU2377499C2 |
| МНОГОЗНАЧНАЯ ГАЛОГРАФИЧЕСКАЯ МЕРА ПЛОСКОГО УГЛА | 2006 |
|
RU2332638C1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| Высокочастотная мера угла сдвига фаз | 1978 |
|
SU769451A1 |
| JP 2007271350 A, 18.10.2007 | |||
| Буровая коронка | 1935 |
|
SU50195A1 |

