(Л
С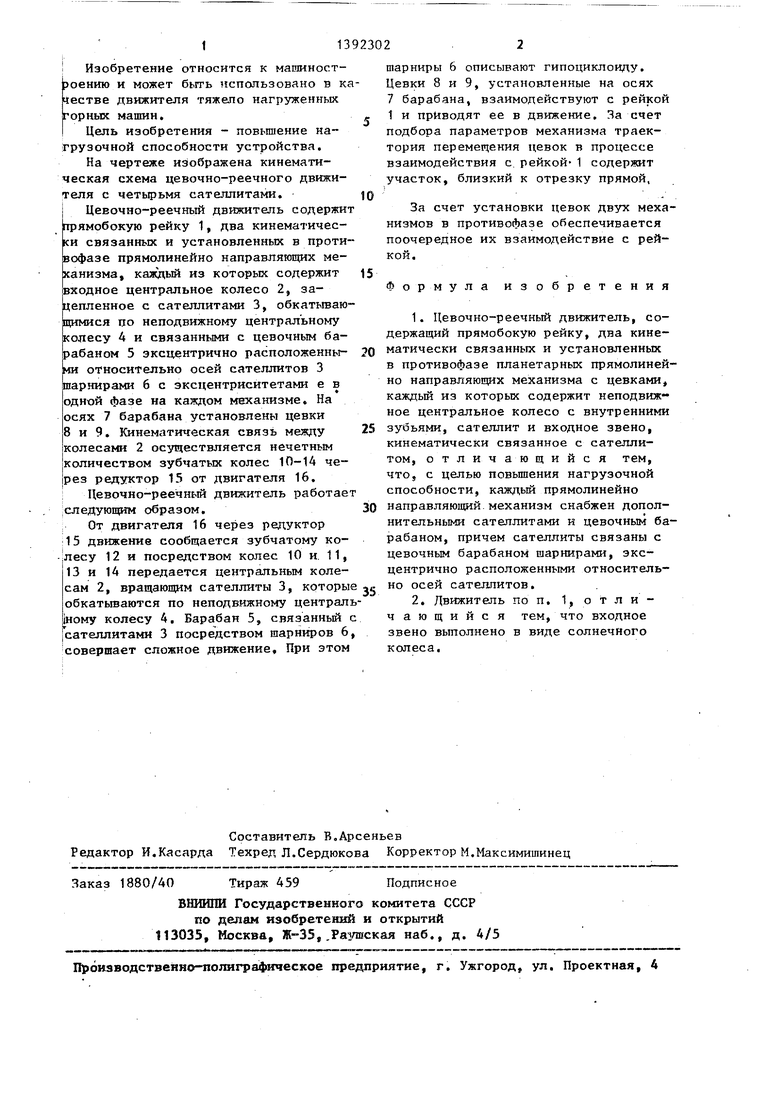
| название | год | авторы | номер документа |
|---|---|---|---|
| Цевочно-реечный механизм | 1987 |
|
SU1518510A1 |
| Цевочно-реечный движитель | 1987 |
|
SU1571239A1 |
| Цевочно-реечный движитель | 1983 |
|
SU1128027A1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| Устройство подачи угольного комбайна | 1987 |
|
SU1566021A1 |
| Механизм подачи очистного комбайна | 1980 |
|
SU937718A1 |
| Устройство для подачи угольного комбайна | 1987 |
|
SU1541384A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ПСЕВДОЦЕВОЧНЫМ ЗАЦЕПЛЕНИЕМ | 2011 |
|
RU2502904C2 |
| УСТРОЙСТВО ПОДАЧИ УГОЛЬНОГО КОМБАЙНА | 1995 |
|
RU2086762C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2018 |
|
RU2693752C1 |

Изобретение относится к машиност- эоению и может быть 1спользовано в кчестве движителя тяжело нагруженных горных машин.
Цель изобретения - повышение нагрузочной способности устройства.
На чертеже изображена кинематическая схема цевочно-реечного движителя с четырьмя сателлитами. I Цевочно-реечный движитель содержи прямобокую рейку 1, два кинематически связанных и установленных в проти вофазе прямолинейно направляющих механизма, каждый из которых содержит входное центральное колесо 2, зацепленное с сателлитами 3, обкатьгоаю щимися по неподвижному центральному колесу 4 и связанными с цевочным барабаном 5 эксцентрично расположенны- ми относительно осей сателлитов 3 шарнирами 6 с эксцентриситетами е в одной фазе на каждом механизме. На осях 7 барабана установлены цевки 3 и 9. Кинематическая связь между колесами 2 осуществляется нечетным количеством зубчатых колес 10-14 че- |рез редуктор 15 от двигателя 16. : Цевочно-реечный движитель работае :следую1цим образом.
От двигателя 16 через редуктор :15 движение сообщается зубчатому ко- |лесу 12 и посредством колес 10 и 11, 13 и 14 передается центральным колесам 2, вращающим сателлиты 3, которые с но осей сателлитов.
обкатьюаются по неподвижному центральному колесу 4. Барабан 5, связанньй с сателлитами 3 посредством шарниров 6, совершает сложное движение. При этом
шарниры 6 описывают гипоциклоиду. Цевки 8 и 9, установленные на осях 7 барабана, взаимодействуют с рейкой 1 и приводят ее в движение. Яа счет подбора параметров механизма траектория перемещения цевок в процессе взаимодействия с. рейкой-1 содержит участок, близкий к отрезку прямой,
За счет установки цевок двух механизмов в противоЛазе обеспечивается поочередное их взаимодействие с рейкой.
Формула изобретения
| Цевочно-реечный движитель | 1983 |
|
SU1128027A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
