оо
со
to 01
00
01
1
Изобретение относится к способам управления технологическими процессами приготовления MHorcjKOMnoHeHTHbix смесей полимеров и может быть использовано в химической и легкой промышленности, в частности при производстве искусственных и синтетических материалов.
Целью изобретения является уменьшение удельных расходов полимеров.
На фиг. 1 изображена схема системы управления; на фиг. 2 схема блока вычисления прогнозируемого значения вязкости смеси; на фиг. 3 -- схема блока определения действительного значения вязкости смеси.
Система управления (фиг. 1) содержит контуры регулирования соотношения расходов полимеров с коррекцией по концентра- 1ИИ полимеров, контуры коррекции по величине прогнозируемой вязкости смеси при заполнении смесителя 1 и но величине действительной вязкости смеси (тонкая корректировка в конце смешения). В смесителе 1 устаиовлена мешалка 2 с приводом 3. На линиях подачи полимеров установлены измерители расхода 4 и 5 концентрации 6 и 7 и вязкости 8 и 9 этих компонентов, а также иснолнительные механизмы 10 и 11. Выходы измерителей расхода 4 и 5 и концентрации 6 и 7 нопарно заведены на входы блоков 12 и 13 умножения, выходы которых паралл1мьно подключены к блоку 14 расчета 10(и (дозируемого значения вязкости смеси, , гакж( к входам регулятора 15 ..(-1 HI расходов полимеров. Выход бло- Kii 14 ;iac-4t:ia прогнозируемого значения ия.жсмчи гмеся 1:он.акт а переключателя 16 подключен к сумматору 17, выход когорог Л с .и.минси с входами ре|улятора 18 COOT НС те и и i блока 19 опред(мения знака си|-на,Лг1 рП .- -огласования. Вы.чод регулятора 18 через копт.чкты ре,теЙ11Ого а.чемента 20, ячейки 21 22 памяти н блоки 23 и 24 сое- с исп:), 1нительны и меканиз.-ами на jiJiHHHx юдачи по.1имер; I 1 п р;1:п :1авите, 1я 25, причем к уг1рпь:1яющим входам ячеек 21 и 22 .)мяти подключен выход б,1ок;:1 19 о 1елл Л ния шака рассогмасованяя.
Мзмер : le. Hi тсмг1ерату()Ы 2в и нязкос-ти смеси 27 сосл.инены с блоком 28 рас 1 та д-йсгви ельной вязкости смеси, вьгход кою рого чере i но|1ма,1Ы1о разомкнутый контакт 29 11од1 ;1ючен к вход) сумматора 17. Изме;.И1С. :ь 30 силы тока привода мешалки через дифферен1,иатор 31 соединен с управ- ляюшим з.Ч . до.м ре,те 32, выход которого со(-динен i: управляющими входл.м.и блоков 23 и 24 и персключа гелей 16 и 29.
Исполнительный механизм 33 па линии гоговой смеси соединен с выходом порогового устройства 34. В.чод по()О1Ч)во1() ус г ройства 34 через нормально разомкнутый контакт 35 сое/щнен с выходом сумматор 17. а его выходы подключены к б. юкам 23 и 24. Управляющий вход контакта 35 соединен с реле 32.
92585
2
Измеритель 36 уровня соединен с входом порогового устройства 37, выходы которого соединены с нормально разомкнутым контактом 38 и входами блоков 23 и 24. Блок 39 своим входом подключен к регулятору 15 соотношения, выходом - к исполнительному механизму 10, а управляющим входом- к реле 32, и к устройствам 34 и 37.
На фиг. 2 представлена схема блока 14 расчета прогнозируемого значения вязкости 10 смеси. Блок 14 реализует зависимость вида
ирог
где
B-f X .
f(xiHbo,+ bi,x, G,; В, bo, bi, - постоянные коэффициенты;
X, - концентрация i-го полимера; 1), -- вязкость i-ro полимера; G,расход 1-го компонента.
Блок 14 состоит из блоков 40 - 43 умноже- иия на постоянный коэффициент, блоков 0 44 и 45 умножения двух сигналов и сумматора 46, причем выходы блоков 40-43 соединены с входами сумматора 46, а входы блоков 40, 41, 44 и 45 умножения подключены соответственно к выходам измерителей 8 и 9 вязкости полимеров и блоков 12 и 5 13 умножения.
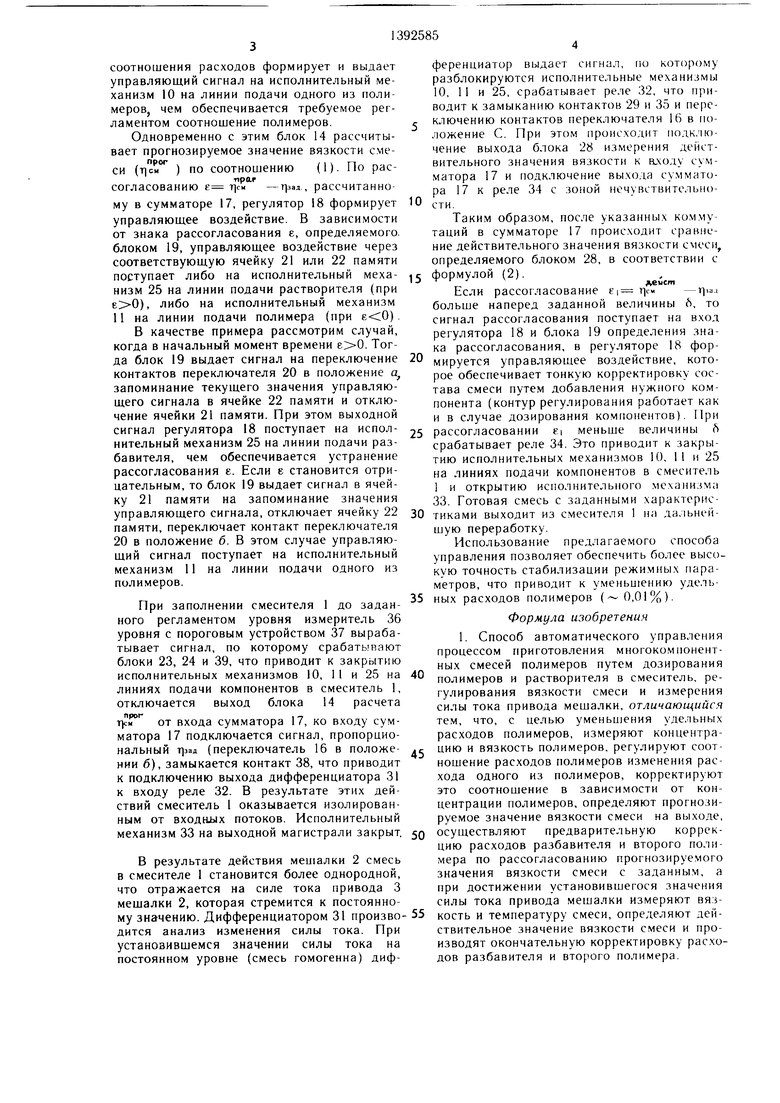
На фиг. 3 представлена схема блока 28 расчета действительного значения вязкости смеси. Блок 28 реализует зависи.мость
Aeucwи.-ыл
1).)..к.
КоТ),
(2)
где г|с«
деиеж
.м
5
5
- соотвс1ственно действительное и измеренное значение вязкости смеси;
Т - температура смеси. Блок 28 состоит из блока 47 умножения на постоянный коэффициент, блока 48 перемножения двух сигналов и сумматора 49, причем входы блока 48 перемножения под- 0 к, 1ючены к измери гелям 1емнерагуры 26 и вязкости смеси 27, а выход через блок 47 умножения соединен с первым входо.м сумматора 49. Второй вход сумматора 49 подключен к выходу измери1еля 27 вязкости смеси. (Система работ;кч следующим образом. | месите,1ь I периодически заполняю полимерами и растворите.чем в задаано.м соот ношении. В pe3v. :bTaTe интенсивного пере- мешиваш за счет меи.1алки 2 .уегся г(1миге1 Н;1я с.чи-сь с .-(.и.аанньши ха ак7ерис- Q Tin з,и ii j составу и вязкости, которая I. .lac ГС 1 мг; дальнейшую переработку. fIjiH .1Л1{епии с-ме1:ите,г1я 1 компонентами |1 ;и -; рывно вычистяется Ц)иход полимеров г. 1 ересчете на абсолютно сухое веш.ество ; гналы, пропорциона,ль11ые .тим величи- 3 нам, с выхода плоков 12 и 13 умножения |;);упают на ь.ходы регулятора 15 соотно и блока 14 расчега прогнозируемого значения вязкости смеси. Регулятор 15
соотно иения расходов формирует и выдает управляющий сигнал на исполнительный механизм 10 на линии подачи одного из полимеров, чем обеспечивается требуемое регламентом соотношение полимеров.
Одновременно с этим блок 14 рассчитывает прогнозируемое значение вязкости смепоог ,, , ч I-I
СИ (TJCM ) ПО соотношению (1). По распраг
согласованию е т|см -т)зад, рассчитанному в сумматоре 17, регулятор 18 формирует управляющее воздействие. В зависимости от знака рассогласования е, определяемого, блоком 19, управляющее воздействие через соответствующую ячейку 21 или 22 памяти поступает либо на исполнительный механизм 25 на линии подачи растворителя (при ), либо на исполнительный механизм 11 на линии подачи полимера (при ). В качестве примера рассмотрим случай, когда в начальный момент времени . Тогда блок 19 выдает сигнал на переключение контактов переключателя 20 в положение а запоминание текущего значения управляющего сигнала в ячейке 22 памяти и отключение ячейки 21 памяти. При этом выходной сигнал регулятора 18 поступает на исполнительный механизм 25 на линии подачи разбавителя, чем обеспечивается устранение рассогласования е. Если е становится отрицательным, то блок 19 выдает сигнал в ячейку 21 памяти на запоминание значения управляющего сигнала, отключает ячейку 22 памяти, переключает контакт переключателя 20 в положение б. В этом случае управляющий сигнал поступает на исполнительный механизм 11 на линии подачи одного из полимеров.
35
40
При заполнении смесителя 1 до заданного регламентом уровня измеритель 36 уровня с пороговым устройством 37 вырабатывает сигнал, по которому срабатывают блоки 23, 24 и 39, что приводит к закрытию исполнительных механизмов 10, 11 и 25 на линиях подачи компонентов в смеситель 1, отключается выход блока 14 расчета
прог
от входа сумматора 17, ко входу сумматора 17 подключается сигнал, пропорциональный (переключатель 16 в положении б), замыкается контакт 38, что приводит к подключению выхода дифференциатора 31 к входу реле 32. В результате этих действий смеситель 1 оказывается изолированным от входных потоков. Исполнительный механизм 33 на выходной магистрали закрыт. 50
В результате действия мешалки 2 смесь в смесителе 1 становится более однородной, что отражается на силе тока привода 3 мещалки 2, которая стремится к постоянно45
Использование предлагаемого способа управления позволяет обеспечить более высокую точность стабилизации режимных параметров, что приводит к уменьшению удельных расходов полимеров (0,01%).
Формула изобретения
1. Способ автоматического управления процессом приготовления многокомпонентных смесей полимеров путем дозирования полимеров и растворителя в смеситель, регулирования вязкости смеси и измерения силы тока привода мешалки, отличающийся тем, что, с целью уменьшения удельных расходов полимеров, измеряют концентрацию и вязкость полимеров, регулируют соотношение расходов полимеров изменения расхода одного из полимеров, корректируют это соотношение в зависимости от концентрации полимеров, определяют прогнозируемое значение вязкости смеси на выходе, осуществляют предварительную коррекцию расходов разбавителя и второго полимера по рассогласованию прогнозируемого значения вязкости смеси с заданным, а при достижении установившегося значения силы тока привода мешалки измеряют вязму значению. Дифференциатором 31 произво- 55 кость и температуру смеси, определяют дейдится анализ изменения силы тока. При установивщемся значении силы тока на постоянном уровне (смесь гомогенна) дифствительное значение вязкости смеси и производят окончательную корректировку расходов разбавителя и второго полимера.
ференциатор выдает сигнал, по которому разблокируются исполнительные механизмы 10, 11 и 25, срабатывает реле 32, что приводит к замыканию контактов 29 и 35 и переключению контактов переключателя 16 в положение С. При этом происходит ПОДК. Ш)чение выхода блока 28 измерения действительного значения вязкости к аходу сумматора 17 и подключение выхода сумматора 17 к реле 34 с зоной нечувствительности.
Таким образом, после указанных коммутаций в сумматоре 17 происходит сравнение действительного значения вязкости смеси, определяемого блоком 28, в соответствии с формулой (2).
0
Aeucm
Ьсли рассогласование больше наперед заданной величины 6
то
0
5
0
5
0
0
5
сигнал рассогласования поступает на вход регулятора 18 и блока 19 определения знака рассогласования, в регуляторе 18 формируется управляющее воздействие, которое обеспечивает тонкую корректировку состава смеси путем добавления нужного компонента (контур регулирования работает как и в случае дозирования компонентов). При рассогласовании ei меньше величины 6 срабатывает реле 34. Это приводит к закрытию исполнительных механизмов 10, II и 25 на линиях подачи компонентов в смеситель 1 и открытию исполнительного механизма 33. Готовая смесь с заданными характеристиками выходит из смесителя 1 на да. шней- шую переработку.
Использование предлагаемого способа управления позволяет обеспечить более высокую точность стабилизации режимных параметров, что приводит к уменьшению удельных расходов полимеров (0,01%).
Формула изобретения
1. Способ автоматического управления процессом приготовления многокомпонентных смесей полимеров путем дозирования полимеров и растворителя в смеситель, регулирования вязкости смеси и измерения силы тока привода мешалки, отличающийся тем, что, с целью уменьшения удельных расходов полимеров, измеряют концентрацию и вязкость полимеров, регулируют соотношение расходов полимеров изменения расхода одного из полимеров, корректируют это соотношение в зависимости от концентрации полимеров, определяют прогнозируемое значение вязкости смеси на выходе, осуществляют предварительную коррекцию расходов разбавителя и второго полимера по рассогласованию прогнозируемого значения вязкости смеси с заданным, а при достижении установившегося значения силы тока привода мешалки измеряют вяз5 кость и температуру смеси, определяют действительное значение вязкости смеси и производят окончательную корректировку расходов разбавителя и второго полимера.
2. Способ по п. 1, отличающийся тем, что коррекцию расходов осуществляют воздействием на расход разбавителя при положительном рассогласовании между действительным или прогнозируемым значениями
вязкости смеси и заданным воздейстьием на расход полимера при отрицательном рассогласовании прямо пропорционально величине этого рассогласования.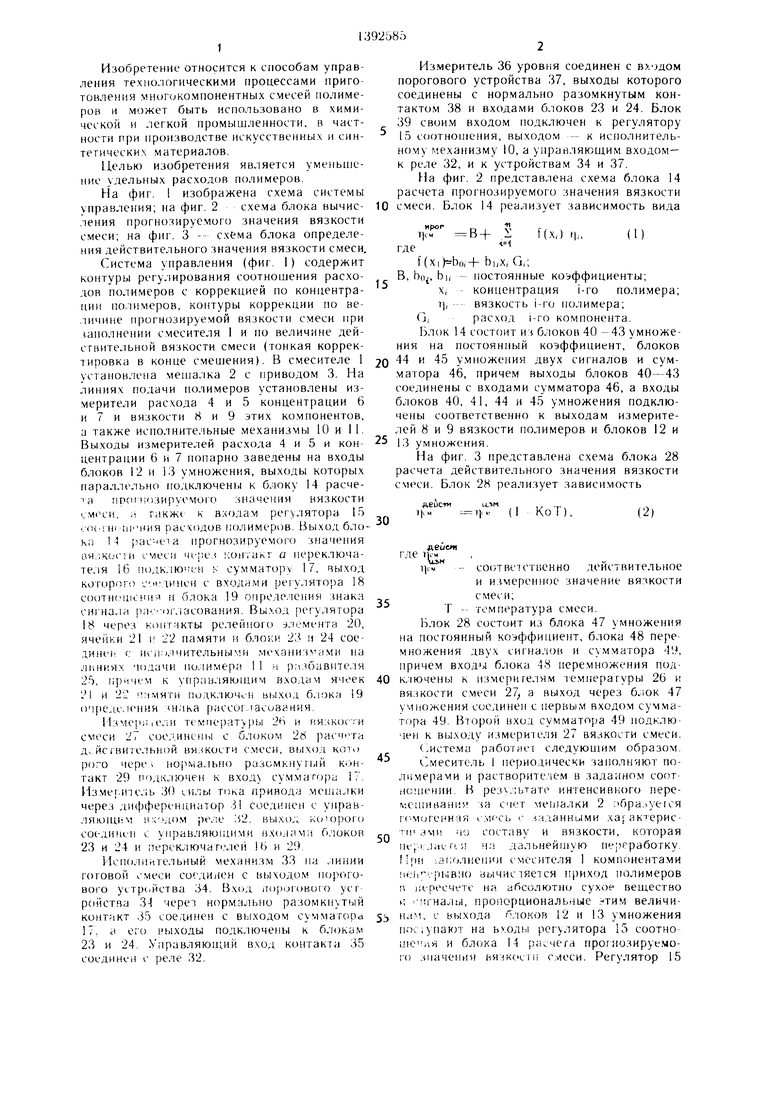
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования состава смеси жидкостей | 1983 |
|
SU1142154A1 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Автоматизированная система управления рудовосстановительной электропечи | 1986 |
|
SU1401242A1 |
| Устройство для регулирования показателя качества продукта | 1982 |
|
SU1057086A1 |
| Способ автоматического управления процессом полимеризации в производстве бутилкаучука и устройство для его осуществления | 1984 |
|
SU1237675A1 |
| Способ автоматического управления процессом экстракции сахара из свекловичной стружки в непрерывно действующем диффузионном аппарате и устройство для его осуществления | 1988 |
|
SU1578200A1 |
| Система автоматического управления процессом приготовления известкового молока | 1977 |
|
SU939554A1 |
| Система управления процессом каталитической сополимеризации | 1979 |
|
SU868704A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ПЕРЕГРЕТОГО ПАРА В МНОГОТОПЛИВНОМ ПАРОГЕНЕРАТОРЕ | 1991 |
|
RU2044214C1 |
| Система автоматической стабилизации работы аппарата для помола многокомпонентного волокнистого полуфабриката | 1988 |
|
SU1544495A1 |

Изобретение относится к химической и легкой отрасля.м промышленности, в частности нри производстве искусственных и синтетических .материалов. Изобретение позволяет повысить точность стабилизации режимных параметров процесса приготовления смесей путем двухступенчатого регу- . ифования процесса сначала грубого - по модели, затем точного - по измеряемым режимным параметрам технологического процесса. I с. и I з.п. ф-лы, 3 ил.
Фиг.
П.СМ
Pu8. 2
| Способ автоматического управления непрерывным процессом получения маслонаполненных синтетических каучуков | 1972 |
|
SU503218A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство , 777о45 | |||
| к,-| | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
