у
(Л
со о
00
о: о
4
I . 1
Изобретение относится к лестроению.
Цель изобретения - повышение дол- говечности за счет обеспечения нежест15
20
25
30
jKou блокировки.
На чертеже приведена кинематичес- |кая схема дифференциала (разрез части моста ведущих колес с охватом предлагаемого устройства и участка од- |Q ного из сателлитов дифференциала).
Внутри верхней части корпуса моста 1 ведуа5их колес установлен ролик 2, управление которым из кабины водителя осуществляется при помощи, наприме р механического или электромагнитного приводов. При механическом приводе ролик 2 соединен со стержнем 3 через отверстие в корпусе, причем сальник 4 предотвращает вытекание масла из корпуса 1. Тяга 5 ведет управление роликом 2 в кабину, а соотношение плеч ск и 5 обеспечивает необходимую силу давления ролика на дугообразную дорожку 6,
Дорожка 6 ша.рнирно соединен а со стойкой 7, которая закреплена на корпусе 8 дифференциала. На одном конце дорожки установлена возвратная пружина 9, а над осью 10, жестко соединенной с сателлитом 11 дифференциала на дорожке 6 имеется нажимной палец 12, которьш имеет упругий элемент 13 с пластиной 14 повышенного трения.
Число дугообразных дорожек 6 соответствует числу сателлитов 11, которые находятся в зацеплении с шес- .тернями 15 ведущих полуосей 16.
Для предотвдащения перемещения оси 10 с шестерней 11 вдоль геометрической о си в пальце имеется кольцевая выточка, «уда входят фиксаторы 17 через крышку 18, которая крепится к корпусу 8 дифференциала винтами 19.
Радиус кривизны дугообразной дорожки 6 изменяется так, чтобы при переводе ролика 2 в рабочее положение, т.е. при опускании ролика вниз, и вращении ко.рпуса 8 в любом направлении при подходе к ролику 2 любого конца дорожки в начале ролик не касается ее и сила давления на дорожку равна нулю, а затем ciina давления возрастает и достигает максимума в момент, когда нажимной палец 12 находится под роликом Это соответствует максимальной силе торможения оси 1 О и сателлита 11,
13936 642
автомоби- По мере вращения корпуса 8 сила
давления ролика на дорожку вновь постепенно уменьшается до нуля в конце дорожки.
Принцип работы предлагаемого устройства следующий.
При отсутствии буксования предлагаемое устройство выключено и ролик 2 находится в верхнем положении. Корпус дифференциала 8 с дугообразной дорожкой 6 вращается, но ролик ее не касается, между пластиной 14 и осью 10 имеется достаточный зазор. Угловая скорость вращения левого и правого ведущих колес и полуосевых шестерен 15 одинакова, в связи с чем сателлит 11 и его ось 10 не вращаются.
На участке буксования, как правило, буксование ведущего колеса с одной стороны ведущего моста больше, чем с другой, а в некоторых случаях одно ведущее колесо вращается с двойной скоростью коробки диффер енциала, а другое колесо вообще не вращается и скорость движения машины равна нулю (полное буксование). При этом ось 10 сателлита вращается, так как полуосевые шестерни 15 вращаются с различной угловой скоростью. Ясно, что если временно блокировать дифференциал, то можно уменьшить буксование в целом и способствовать выходу автомобиля из участка буксования.
Как правило, жесткая блокировка дифференциала производится соединением одной из ведущих полуосей с корпусом дифференциала. В предлагаемом устройстве осуществляется нежесткая блокировка, поэтому дано новое конструктивное решение: торможение оси
35
40
45
50
55
сателлита, которая, в отличие от известных конструкций, в корпусе 8 вращается свободно, а сателлит на оси закрегшен жестко.
Водитель в кабине рычагом (не-показан) через тягу 5 перемещает ролик 2 вниз в рабочее положение. Корпус В с дорожкой 6 вращается, а ролик 2 относительно геометрической оси моста не вращается. Дорожка 6 каждого сателлита 11 в процессе вращения проходит под роликом 2.
Обычно устанавливают от двух до четырех сателлитов. При подходе под ролик 2 любого из двух концов дорожки 6 ролик не касается дорожки и сила давления ролика равна нулю, буксование колес продолжается, сателлит вра5
0
5
сателлита, которая, в отличие от известных конструкций, в корпусе 8 вращается свободно, а сателлит на оси закрегшен жестко.
Водитель в кабине рычагом (не-показан) через тягу 5 перемещает ролик 2 вниз в рабочее положение. Корпус В с дорожкой 6 вращается, а ролик 2 относительно геометрической оси моста не вращается. Дорожка 6 каждого сателлита 11 в процессе вращения проходит под роликом 2.
Обычно устанавливают от двух до четырех сателлитов. При подходе под ролик 2 любого из двух концов дорожки 6 ролик не касается дорожки и сила давления ролика равна нулю, буксование колес продолжается, сателлит вращается вокруг своей геометрической оси. По мере дальнейшег о вращения корпуса 8 сила давления ролика возрастает и максимум силы давления достигается, когда нажимной палец 12 с осью 10 находятся под роликом 2, Ролик давит на дорожку с такой силой, при которой трение пластины 14 по торцу оси 10 достаточно для устранения вращения сателлита 11 вокруг своей оси. Это уравнивает угловые скорости вращения полуосевых шестерен 15 и левого и правого ведущих колес. Получается как бы одна ведущая ось, что снижает буксование. При дальнейшем вращении сида давления ролика на дорожку 6 постепенно снижается до нуля, а затем подходит под ролик 2 ось следующего сателлита и т.д.
Упругость давления ролика 2 на дорожку 6 обеспечивается за счет наличия упругого элемента 13.
Таким образом, за время одного оборота корпуса 8 происходит по числу сателлитов плавный рост и последующее снижение силы давления нажимного пальца 12 на торец оси 10 сателлита 11. Это обеспечивает нежесткую блокировку дифференциала.
Следует учесть, что для уменьшения или прекращения буксования важно в начальный момент двинуть с места автомобиль, дать толчок. Периодическая блокировка вследствие торможения осей сателлитов обеспечивает периодические толчки автомобилю для ус- пещного выхода из участка буксования. Инерция движения тоже способствует уменьшению буксования. Кроме того, длину дугообразной дорожки можно удлинить настолько, чтобы приблиз1 ть к началу следующего сателлита и дорожки его.
0
5
0
5
0
5
0
После выхода из участка буксования , водитель рычажком в кабине поднимает ролик 2, выключая механизм блокировки.
Формула изобретения
1. Дифференциал транспортного средства, содержащий установленные в картере моста в приводном корпусе полуосевые шестерни привода движителей, зацепленные с солнечными щестер- нями, выполненными заодно с осями, noBogpTHo установленными в корпусе, и устройство торможения по крайней мере одной солнечной шестерни, представляющее собой тормозной фрикционный элемент, связанный с одним плечом двуплечего рычага, палец, уста- ; новленный с возможностью осевого пе ремещения от управляющего привода для воздействия на указанный рычаг, шарнирно установленный на корпусе, отличающийся тем, что, с целью повьш1ения долговечности за счет обеспечения нежесткой блокировки, фрикционный элемент размещен над осью сателлитной шестерни и связан с рычагом через упругую связь, дру гое плечо рычага подпружинено в стсррону отвода фрикционного элемента от торца оси сателлита, рычаг выполнен дугообразным, а палец установлен в картере моста и выполнен с роликом на конце для взаимодействия при выдвижении от управляющего привода с дугообразной дорожкой указанного рычага.
2. Дифференциал по п. 1, отличающийся тем, что радиус кривизны дугообразной Дорожки рычага по его концам меньше радиуса кривизны зоны расположения фрикционного элемента.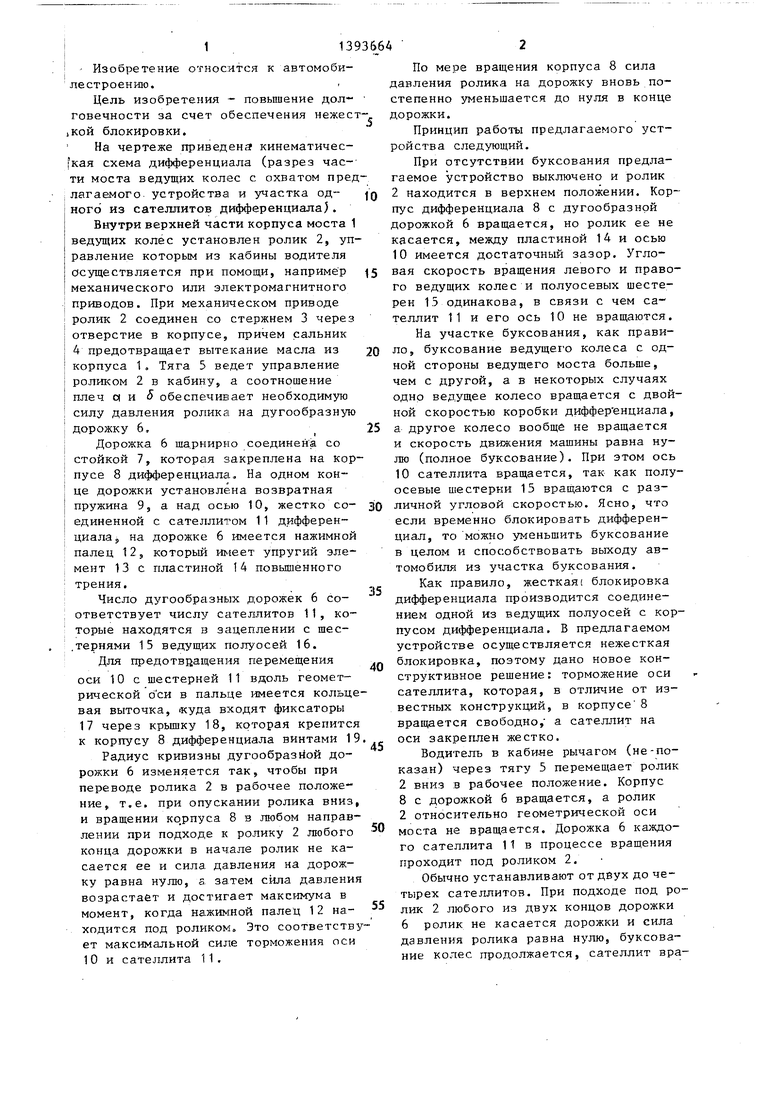

| название | год | авторы | номер документа |
|---|---|---|---|
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ С ДОПОЛНИТЕЛЬНЫМИ СВОБОДНЫМИ САТЕЛЛИТАМИ | 2011 |
|
RU2465499C1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1588580A1 |
| УСТРОЙСТВО ДЛЯ НЕЖЕСТКОЙ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2081008C1 |
| КОНИЧЕСКИЙ ДИФФЕРЕНЦИАЛ С АВТОМАТИЧЕСКОЙ БЛОКИРОВКОЙ | 2017 |
|
RU2653659C1 |
| ГИДРАВЛИЧЕСКИЙ ДИФФЕРЕНЦИАЛ К АВТОМОБИЛЮ | 2016 |
|
RU2647794C1 |
| КОНЕЧНАЯ ПЕРЕДАЧА ВЕДУЩЕГО МОСТА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2037699C1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2015 |
|
RU2611290C1 |
| УНИВЕРСАЛЬНЫЙ ДИФФЕРЕНЦИАЛ | 2017 |
|
RU2653982C1 |
| ДИФФЕРЕНЦИАЛ С АВТОМАТИЧЕСКОЙ БЛОКИРОВКОЙ | 2017 |
|
RU2650316C1 |
| ПРИВОДНОЙ МОСТ КОЛЕСНОГО СРЕДСТВА | 1994 |
|
RU2086428C1 |
Изобретение относится к транспорту. Цель изобретения - повышение долговечности за счет обеспечения нежесткой блокировки. На корпусе 1 закреплены подвижно дугообразные дорожки 6, для взаимодействия с которыми в верхней части корпуса моста ведущих колес установлен ролик,2, управляемый из кабины, при этом дугообразные дорожки 6 подпружинены и снабжены нажимными пальцами 12. 1 з.п. ф-лы, 1 ил.
| СПОСОБ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОЙ ПОДСТАНЦИИ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2365018C1 |
| кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
