/
СО
со
4:: СО
сл
113
Изобретение относится к электротехнике, к электромаюиностроениго и может быть использорано в области шагового маломощного электропривода.
Цель изобретения - упрощение конструкции и обеспечение реверса.
На фиг.1 показан первый вариант шагового электродвигателя,поперечный разрез; на фиг.2 - сечение А-А на фиг.1; на фиг.З - график зависимости питающего напряжения от времени; на фиг,4 - часть шагового электродвигателя; на фиг.З - то же, с винтом; на
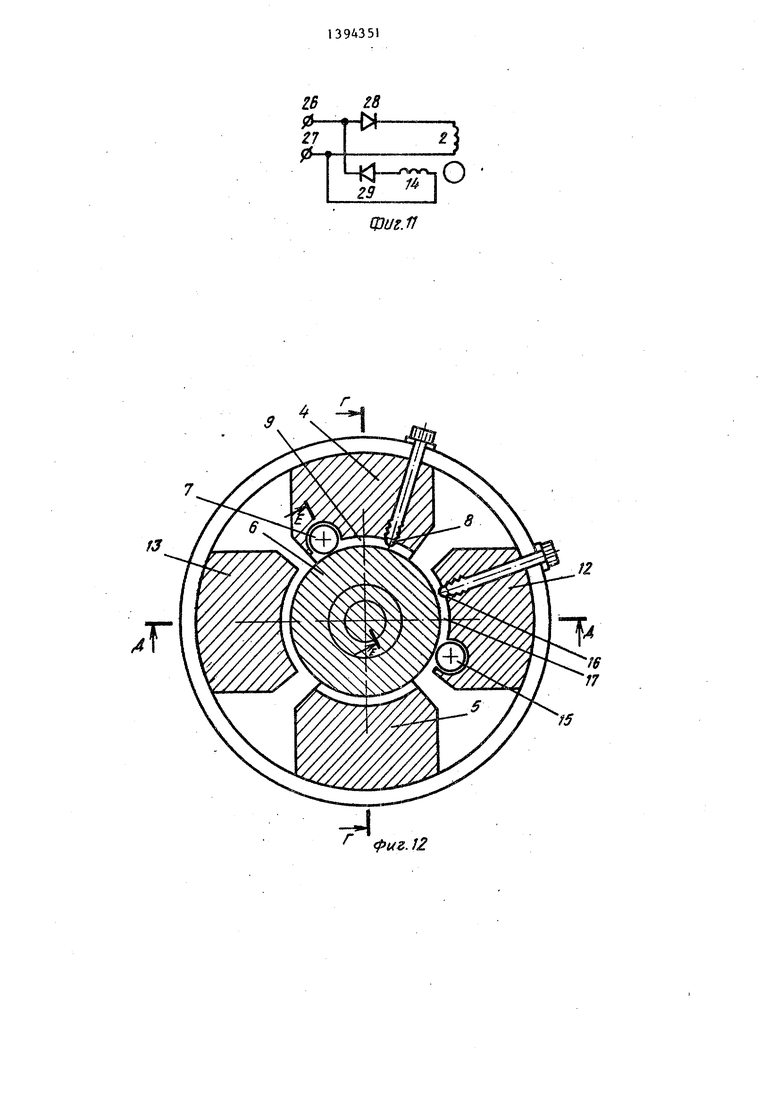
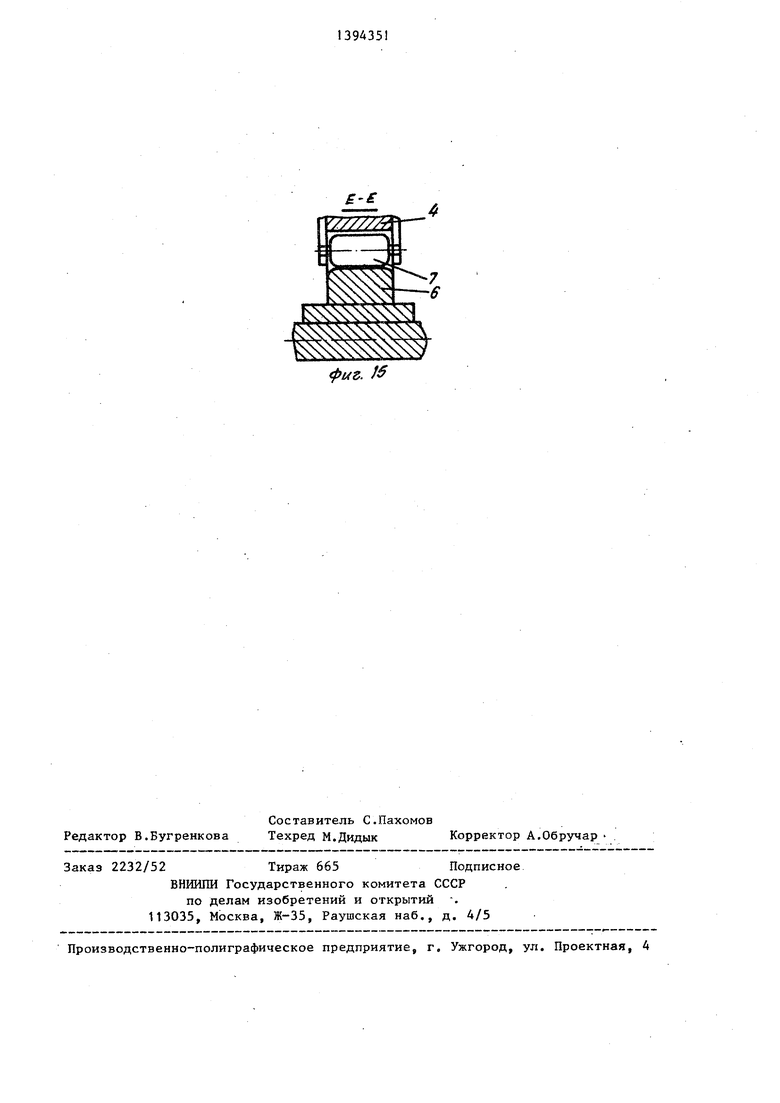
фиг.6 - второй вариант электродвига- j сов статора, гибкий ротор 6 механи- теля, поперечный разрез; на фиг. 7 - третий вариант электродвигателя, поперечный на фиг.З - сечение Б-Б на фиг.7; на фиг.9 - сечение Б-В на фиг,7; на фиг.10 - четвертый ва- 20 риант электродвигателя; на фиг.11 - схема для питания электродвигателя; на фиг.12 - пятый вариант электродвигателя, поперечный разрез; на фиг.13- разрез Г-Г на фиг.12; на фиг.14 - 25 разрез Д-Д на фиг.12; на фиг.15 - сечение Е-Е на фиг.12.
чески взаимодействует с роликом 7. Иньти словами, гибкий ротор 6 при его деформации нажимает на ролик 7, а ролик 7 соответственно - на ротор 6. При этом, в силу того, что ролик 7 расположен не на оси 9, а смещен относительно нее, в воздействии роли ка 7 на ротор 6 появляется составляю щая, заставляющая ротор 6 поворачиваться.
Продолжая деформироваться и поворачиваться при этом на небольшой угол или шаг, гибкий ротор далее входит в контакт с выступом-винтом 8. Положение деформированного ротора 6, Сцепившегося с винтом 8, показ но на фиг.4 прерьшистой кривой. От сцепления гибкого ротора 6 с выступом-винтом 8 статора дальнейший пово рот ротора прекращается. Таким образом, получается, что к концу соверше ния шага гибкий ротор 6, находясь в максимально деформированном состоянии, защемляется между роликом 7 и выступом-винтом 8. Этим и обеспечива ется фиксация ротора 6 к концу совер шения шага.
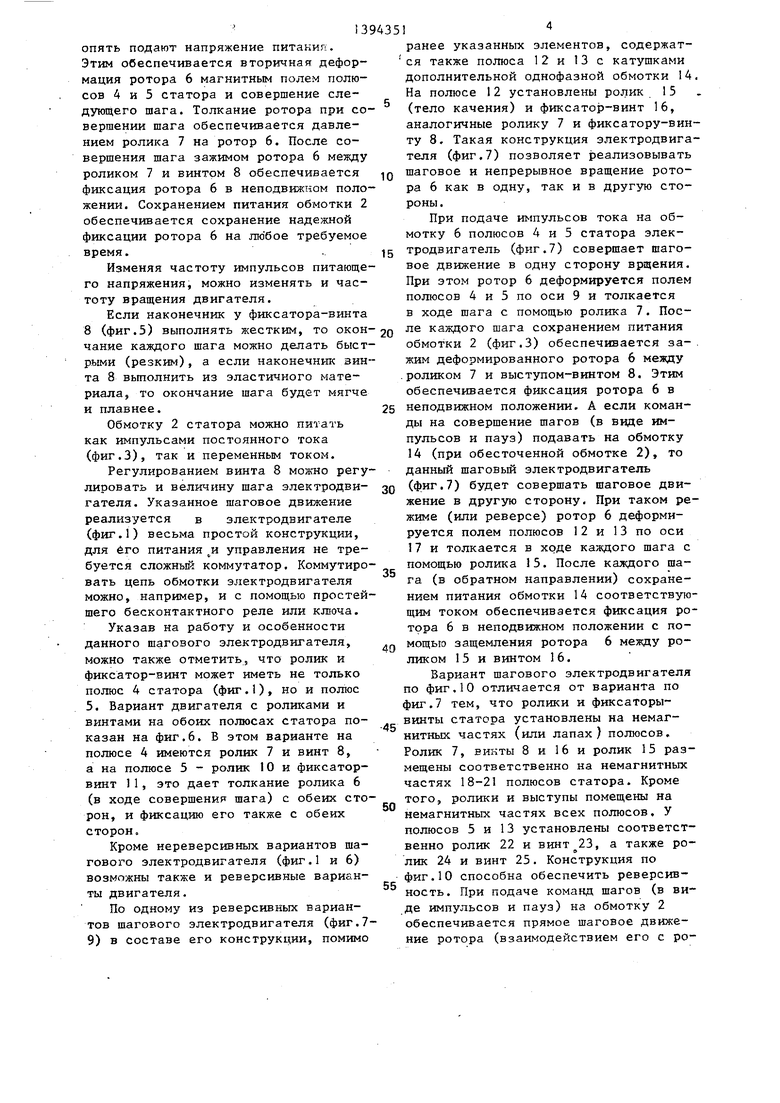
Электродвигатель (фиг.1-15) содержит статор 1 с катушками однофазной обмотки 2, вал 3, полюса 4 и 5 статора, а также гибкий ферромагнитный ротор 6, установленный на валу 3 между полюсами 4 и 5 статора./
„ .
На полюсе 4 статора установлен ролик 7 или.тело качения с неподвижной относительно статора осыо вращения, а также винт 8 или фиксатор.
Ролик 7 и винт 8 расположены по разные стороны от оси 9 полюсов 4 и 5 статора, ролик и винт выступают в рабочий зазор между статором и ротором. Выход ролика 7 в рабочий зазор значительнее, чем выход винта 8. Выход винта 8 в рабочий зазор легко регулируется, ролик 7 и винт 8 можно выполнять из неферромагнитных материалов, ролик 7 может устанавливаться на статоре с помощью соответствующей оси или гнезда, а из множества конструкций главного ферромагнитного гибкого ротора 6 наиболее удобна конструкция из гибкой оболочки, надетой на жесткий вал или втулку, с заполнением полости под оболочкой ротора жидким ферромагнитным веществом.
Шаговый электродвигатель работает следующим образом.
При обесточенной обмотке 2 гибкий . ротор 6 находится в недеформированном состоянии (фиг.).
Для совершения шага на обмотку 2 статора, например, в момент времеин t подается импульс напряжения (фиг.З).
От протекания тока по обмотке 2 у полюсов 4 и 5 статора создается магнитное поле, которое, действуя на гибкий ферромагнитный ротор 6, деформирует его по оси 9.
Деформируясь магнитным полем полюj сов статора, гибкий ротор 6 механи- 0 5
0
О
5
5
0
чески взаимодействует с роликом 7. Иньти словами, гибкий ротор 6 при его деформации нажимает на ролик 7, а ролик 7 соответственно - на ротор 6. При этом, в силу того, что ролик 7 расположен не на оси 9, а смещен относительно нее, в воздействии ролика 7 на ротор 6 появляется составляющая, заставляющая ротор 6 поворачиваться.
Продолжая деформироваться и поворачиваться при этом на небольшой угол или шаг, гибкий ротор далее входит в контакт с выступом-винтом 8. Положение деформированного ротора 6, Сцепившегося с винтом 8, показано на фиг.4 прерьшистой кривой. От сцепления гибкого ротора 6 с выступом-винтом 8 статора дальнейший поворот ротора прекращается. Таким образом, получается, что к концу совершения шага гибкий ротор 6, находясь в максимально деформированном состоянии, защемляется между роликом 7 и выступом-винтом 8. Этим и обеспечивается фиксация ротора 6 к концу совершения шага.
Сохраняя питание обмотки 2 (фиг.З), можно обеспечивать указанную фиксацию ротора на любое длительное время.
Если требуется совершить следующий шаг ротора 6, то с обмотки 2 следует снять импульс питающего напряжения, например, на время tj - t(гдe - время начала паузы, время окончания паузы, фиг.З).
При начале паузы (т.е. при обесто- чивании обмотки 2) ротор 6, возвращаясь в исходное (недеформироваиное) состояние, выходит из сцепления с выступом-винтом 8. После возвращеиия ротора 6 в недеформированное (или круговое) состояние на обмотку 2, например в момент времениtз (фиг.З),
опять подают напряжение питания. Этим обеспечивается вторичная деформация ротора 6 магнитным полем полюсов 4 и 5 статора и совершение следующего шага. Толкание ротора при совершении шага обеспечивается давлением ролика 7 на ротор 6. После совершения шага зажимом ротора 6 между роликом 7 и винтом 8 обеспечивается фиксация ротора 6 в неподвижном положении. Сохранением питания обмотки 2 обеспечивается сохранение надежной фиксации ротора 6 на любое требуемое время..
Изменяя частоту импульсов питающего напряжения, можно изменять и частоту вращения двигателя.
Если наконечник у фиксатора-винта 8 (фиг.5) выполнять жестким, то окон чание каждого шага можно делать быстрыми (резким), а если наконечник винта 8 выполнить из эластичного материала, то окончание шага будет мягче и плавнее.
Обмотку 2 статора можно питать как импульсами постоянного тока (фиг.З), так и переменным током.
Регулированием винта В можно регулировать и величину шага электродви- гателя. Указанное шаговое движение реализуется в электродвигателе (фиг.1) весьма простой конструкции, для его питания и управления не требуется сложньй коммутатор. Коммутировать цепь обмотки электродвигателя можно, например, и с помощью простейшего бесконтактного реле или ключа.
Указав на работу и особенности данного шагового электродвигателя, можно также отметить, что ролик и фиксатор-винт может иметь не только полюс 4 статора (фиг.), но и полюс 5. Вариант двигателя с роликами и винтами на обоих полюсах статора показан на фиг.6. В этом варианте на полюсе 4 имеются ролик 7 и винт 8, а на полюсе 5 - ролик 10 и фиксатор- винт I 1, это дает толкание ролика 6 (в ходе совершение шага) с обеих сторон, и фиксацию его также с обеих сторон.
Кроме нереверсивных вариантов ша- roBoi- o электродвигателя (фиг.1 и 6) возможны также и реверсивные варианты двигателя.
По одному из реверсивных вариантов шагового электродвигателя (фиг.7- 9) в составе его конструкции, помимо
15
2о25
зо
94351 I
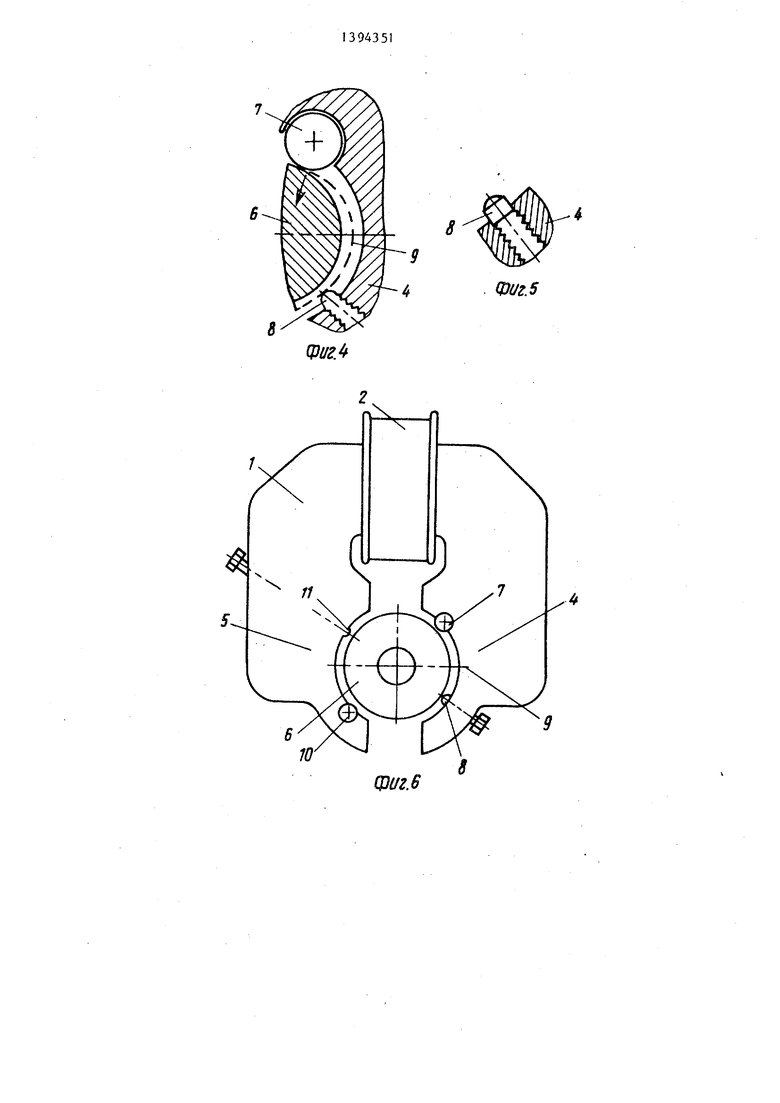
ранее указанных элементов, содержатся также полюса 12 и 13 с катушками дополнительной однофазной обмотки 14, На полюсе 12 установлены ролик 15 (тело качения) и фиксатор-винт 16, аналогичные ролику 7 и фиксатору-винту 8. Такая конструкция электродвигателя (фиг.7) позволяет реализовывать шаговое и непрерывное вращение ротора 6 как в одну, так и в другую стороны .
При подаче импульсов тока на обмотку 6 полюсов 4 и 5 статора электродвигатель (фиг.7) совершает шаговое движение в одну сторону в кцения. При этом ротор 6 деформируется полем полюсов 4 и 5 по оси 9 и толкается в ходе шага с помощью ролика 7. После каждого шага сохранением питания обмотки 2 (фиг.З) обеспечивается за-, жим деформированного ротора 6 между роликом 7 и выступом-винтом 8. Этим обеспечивается фиксация ротора 6 в неподвижном положении, А если команды на совершение шагов (в виде импульсов и пауз) подавать на обмотку 14 (при обесточенной обмотке 2), то данный шаговый электродвигатель (фиг.7) будет совершать шаговое движение в другую сторону. При таком режиме (или реверсе) ротор 6 деформируется полем полюсов 12 и 13 по оси 17 и толкается в ходе каждого шага с помощью ролика 15. После каждого шага (в обратном направлении) сохранением питания обмотки 14 соответствующим током обеспечивается фиксация ротора 6 в неподвижном положении с помощью защемления ротора 6 между роликом 15 и винтом 16.
Вариант шагового электродвигателя по фиг.10 отличается от варианта по фиг.7 тем, что ролики и фиксаторы- винты статора установлены на немагнитных частях (или лапах) полюсов. Ролик 7, викты 8 и 16 и ролик 15 размещены соответственно на немагнитных частях 18-21 полюсов статора. Кроме того, ролики и выступы помещены на немагнитных частях всех полюсов. У полюсов 5 и 13 установлены соответственно ролик 22 и , а также ролик 24 и винт 25. Конструкция по фиг.10 способна обеспечить реверсивность. При подаче команд шагов (в виде импульсов и пауз) на обмотку 2 обеспечивается прямое шаговое движение ротора (взаимодействием его с ро35
40
50
55
5139
ликами 7 и 22 и винтами 8 и 23), а при подаче импульсов и пауз на обмотку 14 обеспечивается обратное шаговое движение ротора (путем взаимодействия его с роликами 15 и 24 и винтами 16 и 25).
В,вариантах по фиг.7 и 10 путем регулирования винтов (например, винтов 8 и 16) можно регулировать и величи- ны прямого и обратного. Питание обмоток 2 и 14 можно осуществлять как по раздельным приводным линиям, так и . по одной двухпроводной линии питания. В последнем случае обмотки 2 и 14
электродвигателя подключаются к клеммам 26 и 27 (фиг.11) двухпроводной линии питания через диоды 28 и 29. В этом случае (фиг.11) подачей питания положительной полярности обеспечива- ется ход ротора в одну сторону, а подачей питания отрицательной полярности - ход ротора 6 в другую сторону.
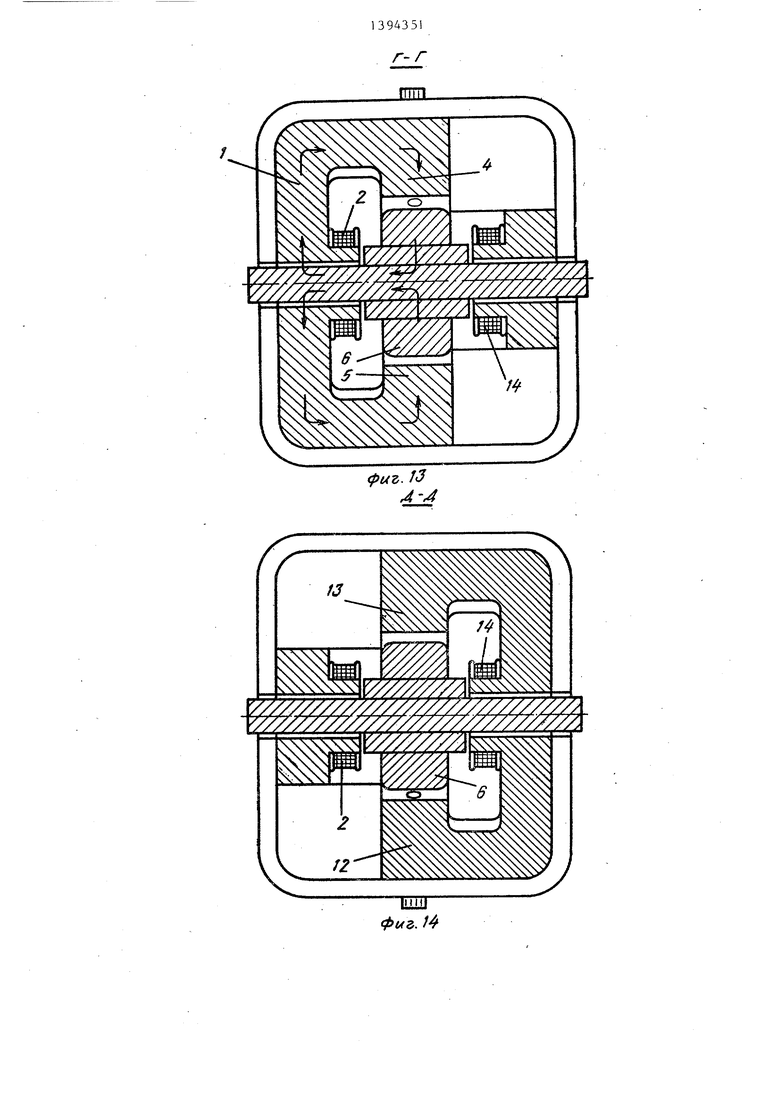
Реверсивный вариант шагового электродвигателя показан на фиг.12-15 , в соответствии с которым статор электродвигателя выполняется на двух Е-об разных электромагнитах, уходящих в разные торцы электродвигателя. Первая Е-образная система статора вьтолняет- ся на полюсах 4 и 5 и обмотке 2, расположенной у первого торца электродвигателя, а вторая Е-образная система статора вьтолняется на полюсах 12 и 13 и обмотке 14, расположенной у второго торца статора электродвигате- ля. Е-образные электромагниты статора повернуты друг относительно друга и расположены в одном корпусе.
При работе данного варианта электродвигателя подачей импульсов и пауз на обмотку 14 обеспечивается об-- ратный ход ротора. После каждого шага сохранением питания обмотки 2 и 14 можно обеспечить длительную фиксацию ротора 6 в неподвижном угловом положении. Регулировкой винтов 8 или 16 можно регулировать величины шагов как при прямом, так и при обратном. Часто совершением мелких шажков можно реализовывать и непрерьшное вращение ротора.
Во всех вариантах предлагаемого электродвигателя достигается сущест
венное упрощение конструкции по сравнению с известными.
Формула изобретения
0
5 ,,
0
5
0
1.Электродвигатель,содержащий статор, электромагнитная система которого содержит полюса с катушками воз- : буждения и гибкий ротор, установленный на выходном валу, о т л и ч а ю- щ и и с я тем, что, с целью упрощения конструкции, он снабжен телами качения и фиксаторами, магнитная система выполнена в виде пары противолежащих полюсов, расположенных на одной оси, проходящей через середину ротора, а по крайней мере на одном
из полюсов по разные стороны от его оси установлены выступающие в рабочий зазор тело качения и фиксатор.
2.Электродвигатель по п.1, о т - личающийся тем, что, с целью обеспечения реверса, он снабжен второй парой противолежащих полюсов, перпендикулярной первой.
3.Электродвигатель по пп.1 и 2, отличающийся тем, что полюса статора выполнены с немагнитными частями, на которых размещены тела качения и фиксаторы.
4.Электродвигатель по п.1, о т- личающийся тем, что тела качения выполнены в вчце ролика, ось которого параллельна валу и закреплена в полюсе.
5.Электродвигатель по п.1, о т - личающийся тем, что фиксатор выполнен в виде винта, установленного в сквозном резьбовом отверстии, вьтолненном в полюсе.
6.Электродвигатель по п.5, отличающийся тем, что винт снабжен наконечником из эластичного материала.
7.Электродвигатель по пп.1-6, отлич ающий с я тем, что магнитная система каждой пары полюсов выполнена в виде Е-образных магнитов, на среднем стержне которых .. размещена обмотка возбуждения, концентричная валу ротора, а полюса - на средних стержнях.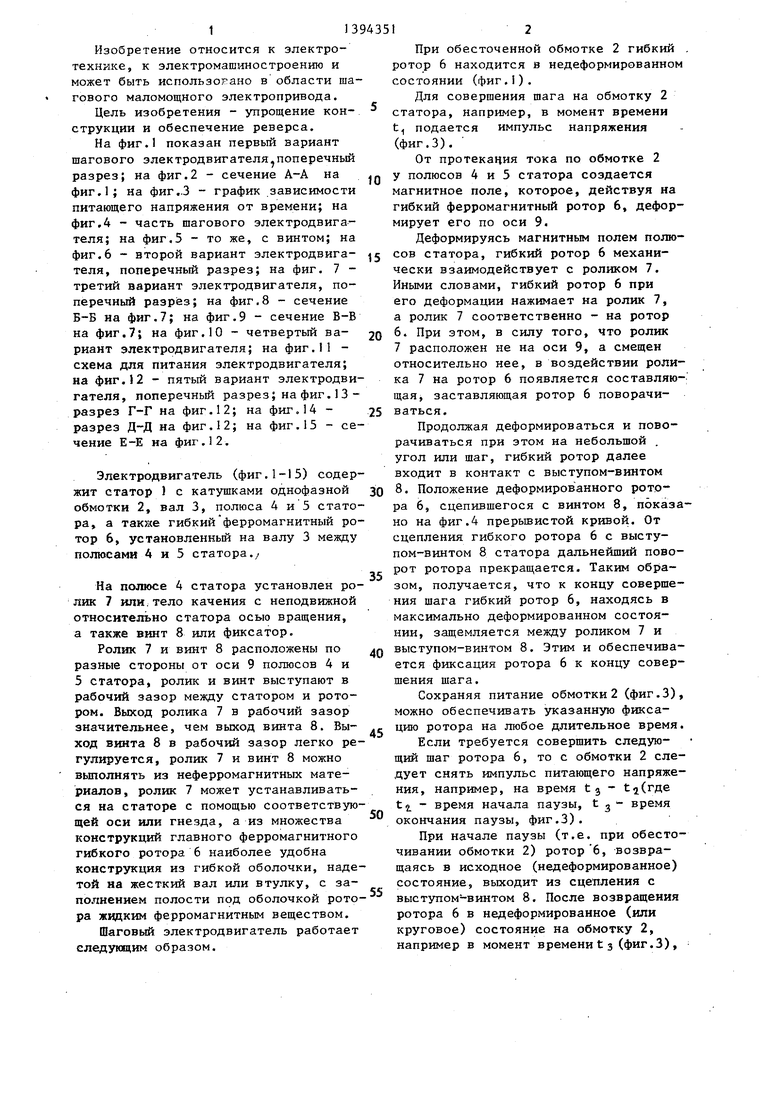

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель | 1987 |
|
SU1748218A1 |
| БЕССАЛЬНИКОВОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ГЕРМЕТИЧНУЮ ПОЛОСТЬ | 1990 |
|
RU2015610C1 |
| Шаговый электродвигатель | 1984 |
|
SU1377978A2 |
| Поляризованный электромеханическийпРЕОбРАзОВАТЕль для пРибОРОВ ВРЕМЕНи | 1976 |
|
SU853600A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| Шаговый электропривод | 1985 |
|
SU1354382A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2214669C2 |
| Шаговый микроэлектродвигатель /его варианты/ | 1979 |
|
SU920975A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1984 |
|
SU1277061A1 |

Изобретение относится к электротехнике и может быть использовано в области шагового маломощного электропривода. Цель состоит в упрощении конструкции. Электродвигатель содержит статор 1 с катушками однофазной обмотки 2 и полюсами 4 и 5 и гибкий ферромагнитный ротор 6. На полюсе 4 статора 1 установлены ролик 7 и винт 8, выступающие в рабочий зазор между статорами 1 и ротором 6. При обесточенной обмотке 2 ротор находится в недеформированном состоянии. При подаче импульса в обмотку 3 у полюсов 4 и 5 статора создается магнитное поле, которое, действуя на гибкий ферромагнитный ротор 6, деформирует его по оси 9. Вследствие этого он вступает в механическое взаимодействие с роликом 7. Из-за смещения ролика 7 относительно оси 9 в воздействии ролика 7 на ротор 6 появляется составляющая, заставляющая ротор 6 поворачиваться. Ротор при деформации и повороте входит в контакт с винтом 8, Q отчего его поворот прекращается« -Этим ® обеспечивается фиксация ротора 6 к концу совершения шага. Винтом 8 можно регулировать величину шага. 6 з.п. ф-лы. 15 ил. (Л
77(
ШЖ
Ц)и г. 2
-1 6
°iiitt
Фиг.З
Щиг.
Фиг.5
фиг. 6
Б- Б
7777/.
V - KxXXXN М
U
фиг 8
П
25
23
В-в
J2
Фиг. 9
фт. 10
16 18
3
QJUg.-n
12
fS
W///7//A
У///7///У///У/
y/////////y/w////////////
риъ. J3 4-л
IITIT
фиъ. /
фиг. /
| Дискретный электропривод с шаговыми ДБигаталями./Под ред | |||
| Б.А.Ивобо- тенко, В.П.Рубцова и др | |||
| - М.: Энергия, 1971, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| I | |||
