Изобретение относится к электротехнике, в частности к шаговым электродвигателям с реактивными роторами, и может быть использовано в промышленных, транспортных и приборных электромеханических системах.
Известен шаговый электродвигатель, состоящий из корпуса, вала, статора с гладкими полюсами и с трехфазной обмоткой и зубчатого ротора (В.В.Хрущев. Электрические машины систем автоматики. - Л.: Энергоатомиздат, 1985 г.) [1].
Недостатком таких двигателей являются низкие массогабаритные показатели.
Наиболее близким к заявленному электродвигателю по составу и функциональным признакам является многофазный шаговый электродвигатель, содержащий корпус, вал, ротор с зубцами и статор со смещенными относительно друг друга на 1/m (m - число фаз) зубцового деления ротора фазными зонами, состоящими из рядом расположенных зубчатых полюсов, охватываемых последовательно-встречно соединенными между собой катушками фазы (патент №2113755, Н02К 37/02, опубл. 2003.12.27, Б. №36) [2].
Недостатком данного двигателя являются низкие массогабаритные показатели, поскольку взаимодействие между статором и ротором происходит на одной цилиндрической поверхности в рабочем зазоре.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в улучшении массогабаритных показателей шагового электродвигателя.
Технический результат достигается тем, что в электродвигатель, содержащий корпус, вал, магнитопровод ротора с зубцами, пакет статора с многофазной обмоткой и с полюсами, имеющими зубцы, причем зубцы на соседних полюсах сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, введены чередующиеся коаксиальные полые цилиндры ротора и статора, состоящие из ферромагнитных и немагнитных элементов, расположенных вдоль оси вращения, причем цилиндры ротора механически связаны с магнитопроводом ротора, а цилиндры статора - с корпусом, при этом зубцы полюсов и ферромагнитные элементы цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы цилиндров ротора имеют свои одинаковые угловые положения.
Сущность заявленного изобретения поясняется на Фиг.1-5,
где
Фиг.1 - поперечное сечение трехфазного шагового электродвигателя;
Фиг.2 - продольное сечение трехфазного шагового электродвигателя;
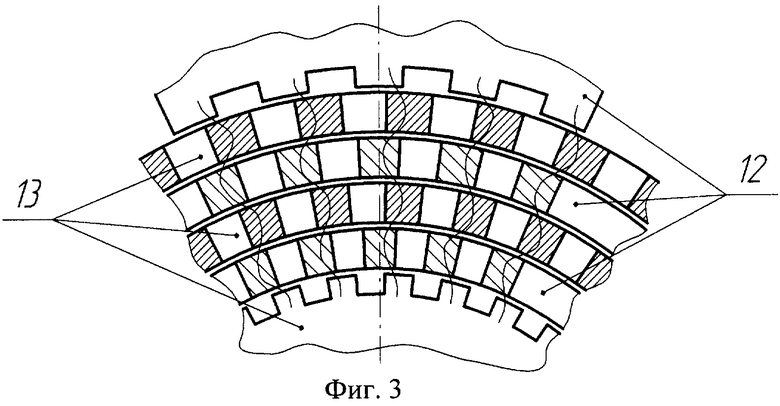
Фиг.3 - часть магнитной системы двигателя;
Фиг.4 - графики напряжений питания обмотки двигателя;
Фиг.5 - реализация изобретения в случае двигателя поступательного движения.
Здесь: 1 - корпус, 2 - пакет статора, 3 - многофазная обмотка, 4 - магнитопровод ротора, 5 - вал, 6 - полые цилиндры ротора, 7 - полые цилиндры статора, 8 - ферромагнитные элементы полых цилиндров статора и ротора, 9 - немагнитные элементы полых цилиндров статора и ротора, 10 - немагнитный диск, 11 - немагнитная втулка, 12 - статор, 13 - ротор, 14 - пакет статора двигателя поступательного движения, 15 - лайнер, 16 - пластина статора, 17 - пластина лайнера.
Пакет статора 2 установлен в корпусе 1 и имеет полюсы, на каждом из которых размещена одна из фаз обмотки 3 - А, В и С. На поверхностях полюсов, обращенных к зазору, имеются зубцы. Зубцы на соседних полюсах сдвинуты на треть зубцового деления. Магнитопровод ротора 4 размещен на валу 5 и имеет на наружной поверхности зубцы с тем же угловым шагом, что и зубцы на полюсах статора. Между зубцами полюсов статора и магнитопровода ротора имеются чередующиеся коаксиальные полые цилиндры ротора 6 и статора 7, причем цилиндры ротора механически связаны с магнитопроводом ротора через немагнитный диск 10, а цилиндры статора крепятся к корпусу немагнитной втулкой 11, при этом зубцы полюсов и ферромагнитные элементы 8 цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы 8 цилиндров ротора имеют свои одинаковые угловые положения.
На Фиг.3 приведена часть магнитной системы двигателя, на которой показаны силовые линии магнитного потока, проходящего через статор 12 и ротор 13.
Шаговый электродвигатель работает следующим образом. При подаче импульса напряжения на фазу А возникает магнитный поток, проходящий по соответствующим полюсам статора 2. Зубцы магнитопровода 4 ротора и ферромагнитные элементы 8 его полых цилиндров 6 притягиваются к зубцам и ферромагнитным элементам 8 полых цилиндров статора 7, расположенных напротив полюсов с фазой А. При подаче импульса напряжения на фазу В возникает магнитный поток, проходящий по полюсам с этой фазой. Зубцы магнитопровода 4 ротора и ферромагнитные элементы 8 его полых цилиндров 6 притягиваются к зубцам и ферромагнитным элементам 8 полых цилиндров статора 7, расположенных напротив полюсов с фазой В. При этом ротор поворачивается по часовой стрелки на угол, равный одной трети углового зубцового деления. Затем импульс напряжения подается на фазу С, потом на фазы А, В, С и т.д. Для реверса следует изменить порядок чередования фаз, то есть подавать импульсы на фазы в порядке С, В, А, С, В, А.
На фиг.5а показан плоский вариант шагового двигателя с большими зубцами. Сила магнитного тяжения определяется формулой

где S - площадь поверхности, на которую действует сила; В - магнитная индукция; μ0 - магнитная постоянная. Сила, действующая на зубцы лайнера 15, зависит от площади поверхностей, показанных жирными линиями.
В случае магнитной редукции применяют малые зубцы (фиг.5б). В данном шаговом двигателе зубцов в три раза больше, но их высота в три раза меньше для сохранения картины магнитного поля. В результате суммарная площадь действия силы сохраняется, как и сама сила.
На Фиг.5в показан двигатель с одной дополнительной пластиной статора 16 и одной дополнительной пластиной лайнера 17. Пластины статора и лайнера состоят из ферромагнитных и немагнитных элементов (ферромагнитные элементы заштрихованы). Количество зубцов соответствует количеству зубцов в случае двигателя на Фиг.5б, но против каждого зубца лайнера есть ферромагнитный элемент, на который действуют силы со стороны зубца и ферромагнитного элемента статора. В результате общая сила будет в три раза больше.
Таким образом, введением дополнительных полых цилиндров статора и ротора получен шаговый электродвигатель с моментом, увеличенным в несколько раз, но при тех же габаритных размерах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321140C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2356155C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| МОДУЛЬНАЯ МАШИНА ДЛЯ БЕЗРЕДУКТОРНОГО ВЫСОКОМОМЕНТНОГО ПРИВОДА | 2019 |
|
RU2731017C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2031523C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2545167C1 |



Изобретение относится к электротехнике, к шаговым электродвигателям с реактивными роторами и может быть использовано в промышленных, транспортных и приборных электромеханических системах. Технический результат заключается в улучшении массогабаритных показателей. Электродвигатель содержит корпус, пакет статора с многофазной обмоткой и с полюсами, имеющими зубцы. Зубцы на соседних полюсах сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз. Магнитопровод ротора выполнен с зубцами. На валу расположены коаксиальные полые цилиндры ротора, чередующиеся с полыми цилиндрами статора, которые состоят из ферромагнитных и немагнитных элементов, расположенных вдоль оси вращения. Цилиндры ротора механически связаны с магнитопроводом ротора через немагнитный диск. Цилиндры статора крепятся к корпусу при помощи немагнитной втулки. Зубцы полюсов и ферромагнитные элементы цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы цилиндров ротора имеют свои одинаковые угловые положения. Благодаря введению дополнительных полых цилиндров ротора и статора получен электродвигатель с высокими массогабаритными показателями. 7 ил.
Шаговый электродвигатель, содержащий корпус, вал, магнитопровод ротора с зубцами, пакет статора с многофазной обмоткой и с полюсами, имеющими зубцы, причем зубцы на соседних полюсах сдвинуты относительно друг друга на 1/m зубцового деления, где m - число фаз, отличающийся тем, что введены чередующиеся коаксиальные полые цилиндры ротора и статора, состоящие из ферромагнитных и немагнитных элементов, расположенных вдоль оси вращения, причем цилиндры ротора механически связаны с магнитопроводом ротора, а цилиндры статора - с корпусом, при этом зубцы полюсов и ферромагнитные элементы цилиндров статора, а также зубцы магнитопровода и ферромагнитные элементы цилиндров ротора имеют свои одинаковые угловые положения.
| М-ФАЗНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2113755C1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2246787C2 |
| Электрический реактивный шаговый двигатель | 1957 |
|
SU118037A1 |
| Шаговый электродвигатель | 1976 |
|
SU644016A1 |
| ЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1971 |
|
SU453855A3 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074489C1 |
| СЕЛЕКТИВНЫЕ ЛИГАНДЫ G-КВАДРУПЛЕКСНЫХ СТРУКТУР НУКЛЕИНОВЫХ КИСЛОТ | 2015 |
|
RU2588131C1 |
| DE 3723979 A, 25.02.1988 | |||
| JP 63129859 A, 02.06.1988 | |||
| DE 4125779 А, 17.12.1992. | |||

