Изобретение относится к оборудованию для переработки полимерных материалов и может быть использовано для открьп ия и стягивания пресс-фор- мы, в частности при изготовлении сте клопластиковьк передних крьшьев автомашины Жигули.
Цель изобретения - упрощение конструкции устройства и повышение ее надежности.
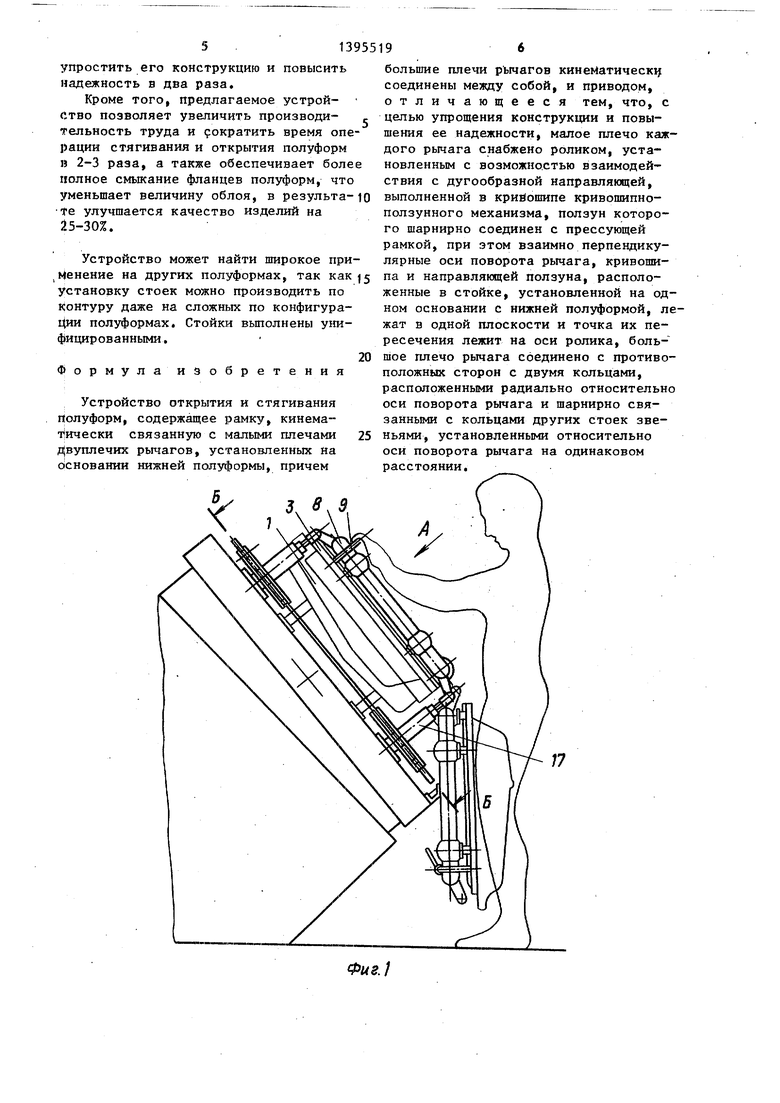
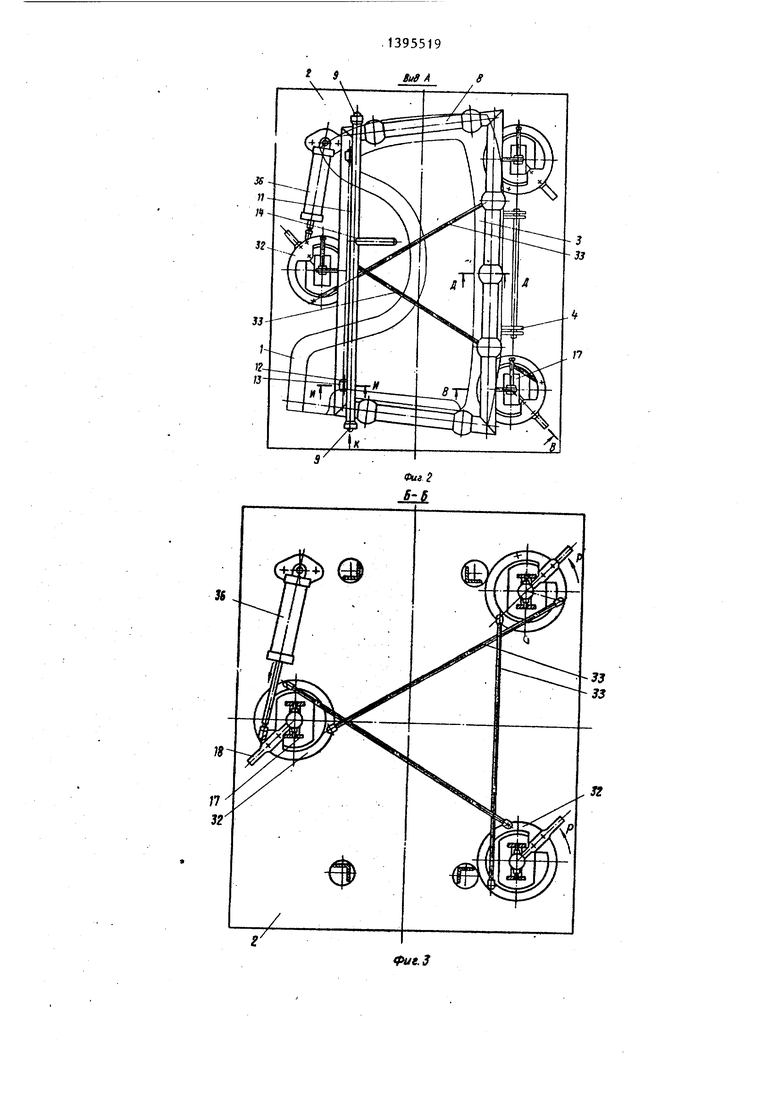
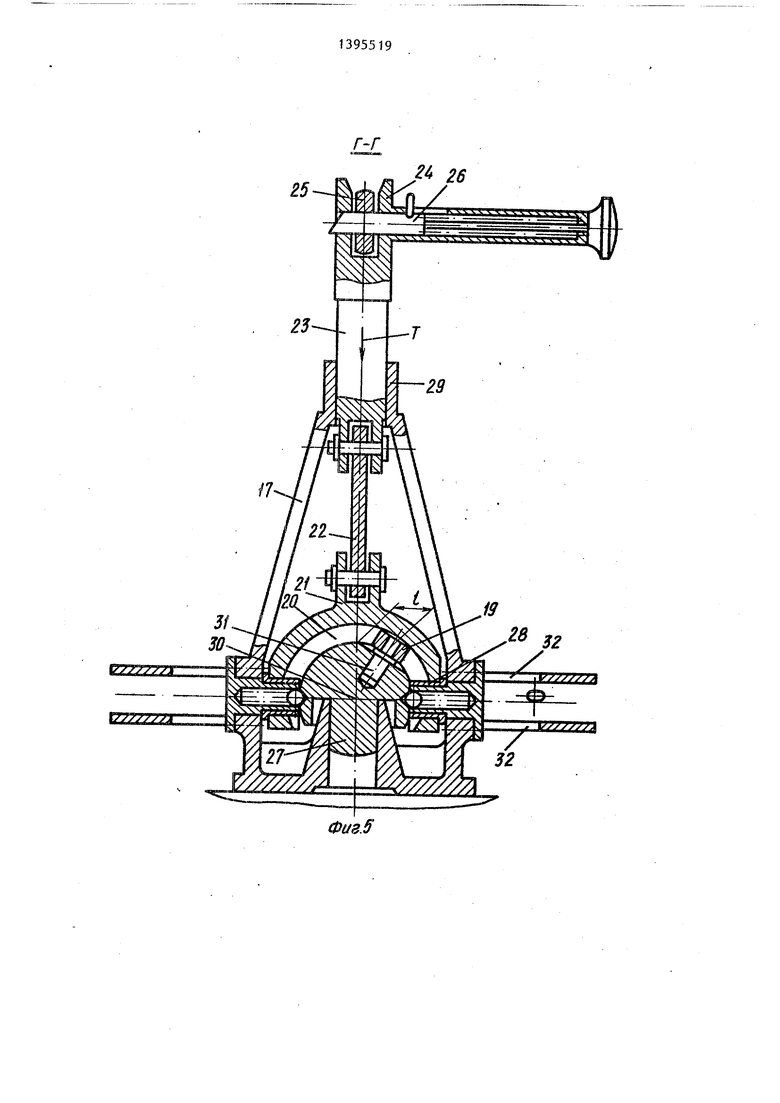
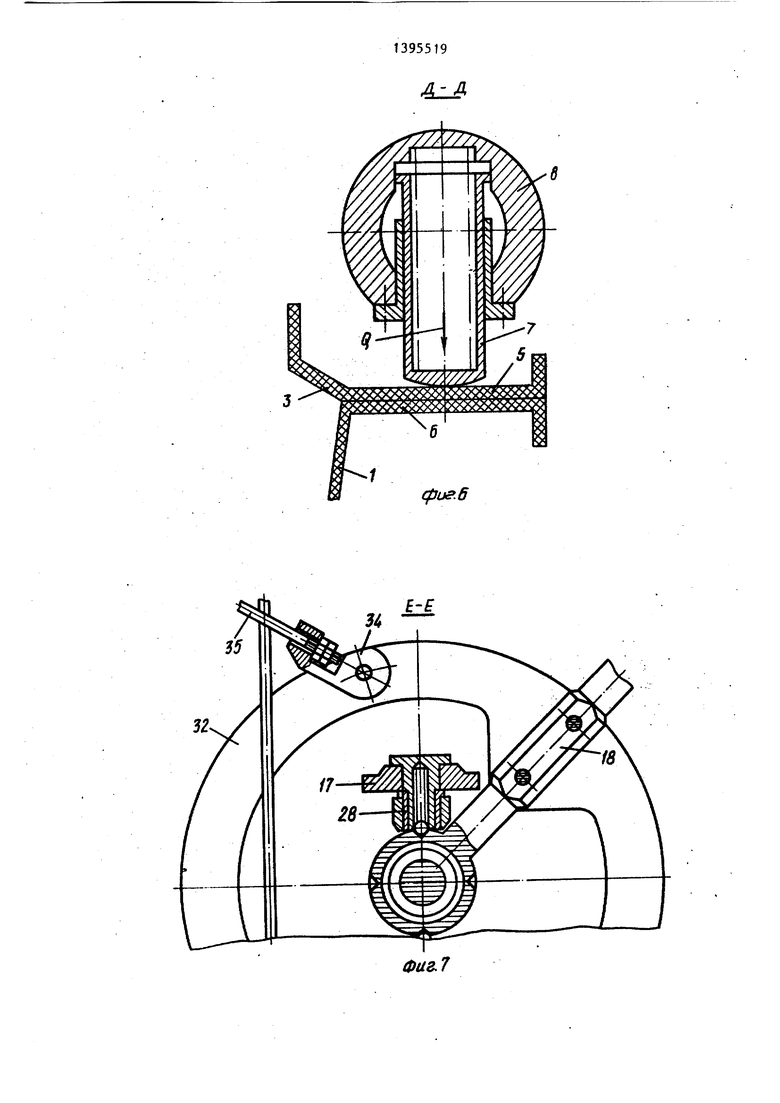
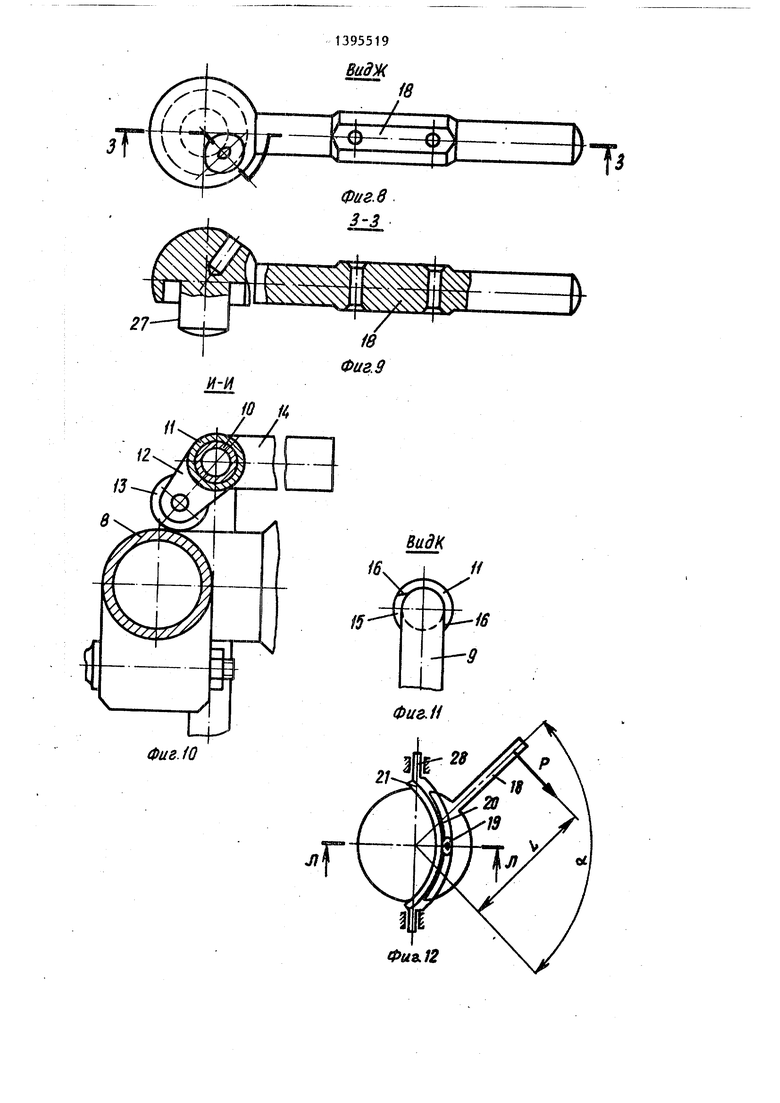
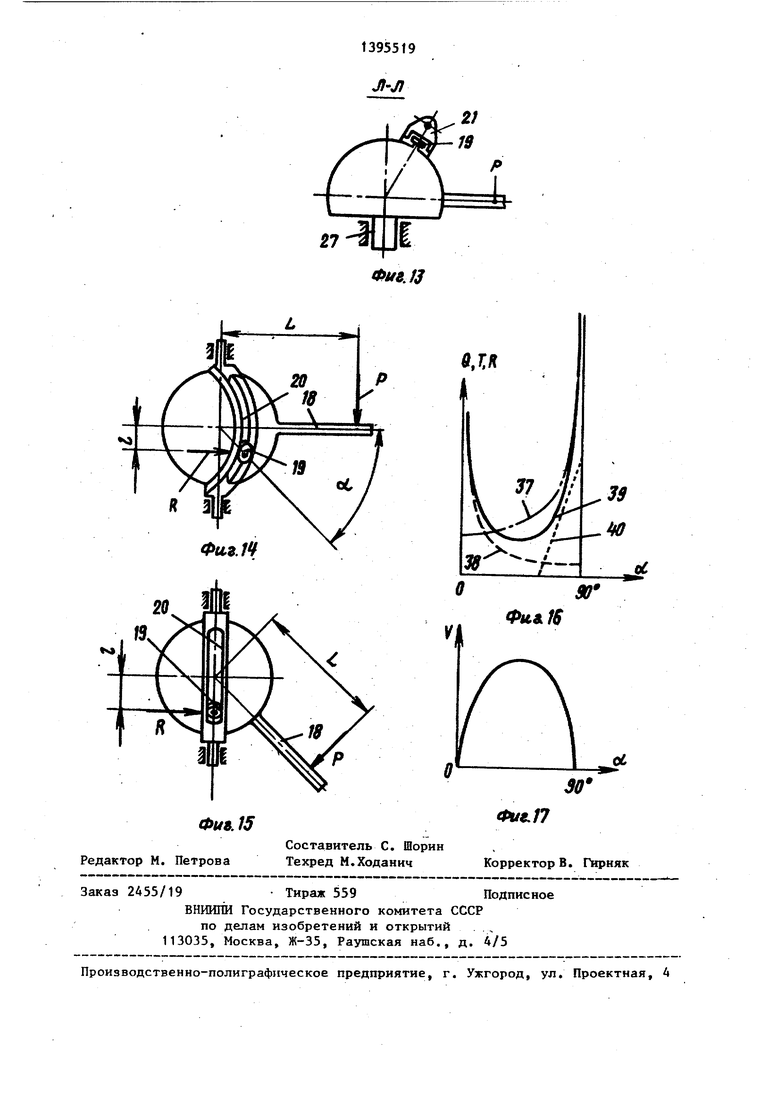
На фиг. 1 изобргокено устройство открытия и стягивания пресс-формы на рабочем месте формования; на фиг. 2 - вид А на фиг. 1 (расположе- ние стоек устройства относительно формы, полуформы открыты); на фиг.3 - сечение Б-Б на фиг. t(по рычагам, звеньям и приводу, полуформы стянуты); на фиг. 4 - сечение В-В на фиг. 2(по стойке, гголуформы стянуты) на фиг. 5 - сечение Г-Г на фиг. 4 (н стойке, полуформы открыты; на фиг.6 сечение Д-Д на г. 2(по подпружиненному толкателю); на фиг. 7 - сечение Е-Е на фиг. 4 (по рычагу); на фиг.8 вид Ж на фиг. 4 (рычаг); на фиг. 9 сечение 3-3 на (tinr. 8 (рычаг); - ,на фиг. 10 - сечение на фиг. 2 (по рамке и поручню); на фиг. 11-- вид К на фиг. 2 (ножка поручня); на фиг. 12 - кинематическая схема взаимодействия ролика рычага с дугообразной направляющей кр1«вошипа (соответствует положению на фиг. 4); на фиг. 13 - сечение Л-Л на фиг. 12; на фиг. 14 - кинематическая скема промежуточного положения pbwaraij на фиг. 15 - кинематическая схема (соответствует открьп ому положетда полу- форм на фиг. 5); на фиг, 16 - изменение усилий на ролике кривошипа и ползуна по углу поворота рычага; на фиг. 17 - изменение скорости ползуна по углу поворота рычага
Устройство открытия и стягивания полуформ содержит нижнюю платформу 1, установленную на основании 2, и поворотную относительно нее полуформу 3 на петлях 4, Фланец 5 полу- формы 3 прижимается к фланцу 6 полу- формы 1 подгфужиненн)1ми толкателями 7 прессующей рамки 8 (фиг„ 6). К фланцу 5 полуформы 3 прикреплен на ножках 9 поручень 10, охватывающий рамку 8. На поручень 10 (., 10) надета труба 11 с проушинами 12 н роликами 13, Поворот трубы 11 на поручне 10 осуществляется рукояткой 14. Труба 11 на концах имеет вьфезы 15 с упорами 16, опрающимися на ножки 9 поручня 10 (фиг. 11), что ограничивает поворот трубы 11 в заданных пределах. На основании 2 размещены три стойки 17. В каждой стойке 17 установлен шарнир но рычаг 18, на малом плече 1 которо размещен ролик 19, взаимодействующий с дугообразной направляющей 20, выполненной в кривощипе 21 кривошипно- ползунного механизма. Кривошип 21 связан щарнирно звеном 22 с ползуном 2,3, другая сторона которого соединена шарнирно с рамкой 8. В вилке ползуна 23 размещена проушина 25 рамки 8, которая соединена щарнирно подпружиненным шкворнем 26. Взаимно перпендикулярные оси 27 и 28 поворота рычага 18 и кривошипа 21 соответственно, а также ось 29 направляющей ползуна 23, расположенные в стойке 17, лежат в одной плоскости и точка 30 их пересечения лежит на оси 31 ролика 19. Большое плечо L рычага соединено с противоположных сторон с двумя кольцами 32, расположенными радиально оси 27 поворота рычага 18. Кольца 32 трех стоек 17 шарнирно связаны звеньями 33. Концы звеньев 33 (фиг. 7) вьшолнены в виде скоб 34, с одной стороны шарнирно соединенных с кольцами 32, а с другой - тягой 35 Тяги 35 свободно входят в скобы 34 и заканчиваются резьбой и гайкой, что позволяет им работать только на растяжение, вследствие чего они конструктивно компактны. Одно из колец 32 соединено шарнирно с пневмоцилинд ром 36, который шарнирно установлен на основании 2. .
Рассмотрим кинематику устройства, начиная от приводного рычага 18 Передаточное отношение рычага 18 (фиг. 12-15) к дугообразной направляющей 20 кривошипа 21 меняется согласно уравнению
R PL
R - J-,
где 1 изменяется от максимального значения на фиг. 15 до нуля на - фиг. 12. Вследствие этого R - усилие стягивания меняется наоборот от номинального значения до бесконечности. На фиг. 16 дана кривая 37 изменения R в зависимости от угла of, поворота рычага 18. Плечо L изменяется мало. Следующее кинематическое звено - кривошип 21 со звеном 22 составляет двухэвенник. Передаточное отношение двухзвенника меняется по параболе 38 (фиг, 16), где усилие на ползуне стремится в начале к бесконечности, а потом резко падЪет. Суммируя кинематику всего устройства, получают кривую 39, где видно, что в начальном и конечном положениях усилие на ползуне стремится к бесконечности. На фиг, 16 показана прямолинейная характеристика 40 изменения усилия пружин толкателей 7, Это очень важная
особенность устройства, позволяющая ппавно (без рывков) выводить ползун из начального и конечного состояний покоя. На фиг, 17 в соответствии с кривой 39 показано изменение скорости ползуна, где видно, что в начальном и конечном положениях ползуна скорость его равна нулю, а в среднем положении при прохождении холостого хода и выборки технологических зазоров - максимальна.
Устройство открытия и стягивания полуформ работает следующим образом,
В исходном положении прессующая рамка 8, шарнирно подвещенная на двух стойказ 17, повернута вниз. При зтом оси проушин поворотной полуформы 3 соосны с осями шарнира поворота прессующей рамки 8, Формовщик поворачивает рамку 8 с полуформой 3 и с помощью шкворня 26 подсоединяет рамку к ползуну третьей стойки 17, Исходное положение частей устройства показано
на фиг, 1, 2, 5 и 15, Устройство может . работать- как вручную (от приложения усилия Р к -большему плечу L рыча- га 18), так и от пневмоцилиндра 36, Это очень удобно, так как бьтают перерывы подачи сжатого воздуха в производстве и, чтобы не останавливать производственный цикл формования, используют ручной привод. При повороте рычага 18 ролик 19 воздействует на дугообразную направляющую 20 кривошипа 21, Последний, поворачиваясь вокруг оси 28, складьшает образо- ванный со звеном 22 двухзвенник и перемещает вниз ползун 23, соединенный шарнирно одной стороной со звеном 22, а другой - с проушиной 25 рамки 8, Рычаги 18, соединенные кинематичес ки с помощью колец 32 и звеньев 33 между собой, заставляют ползуны одновременно и синхронно опускаться вниз в трех стойках. Перемещаясь вниз.
519
рамка 8 выбирает технологические зазоры .между подпружиненными толкателями 7 и фланцем 5 полуформы 3, После выборки зазоров начинается стягивание фланцев 5 и 6 полуформ 3 и 1 подпружиненными .толкателями 7. Усилие R в конце хода ползуна 23 стремится к бесконечности (кривая 37 на фиг, 16), Q поэтому происходит плавное (без рывков и заеданий) запирание роликов
19через дугообразную направляющую
20кривошипа 21, Ролик 19 находится
5
0
5
5
о
о з п j.
в конце хода в мертвом положении (фиг, 3, 4, 7, 12 и 13), Фланцы 5 и 6 полуформы 3 и 1 стянуты. Даже если перестанут подавать сжатый воздух в пневмоцилиндр, устройство будет находиться в фиксированном роликом 19 положении. Дополнительно в осях кривошипа 21 установлены подпружиненные шарики, являющиеся также фиксаторами рычага 18, Последующий этап работы - это контактное формование крыла автомашины Жигули в полуформах с последующей полимеризацией. Для съема готовой продукции - отрыва готового изделия от полуформ - поворачивают рукоятку 14 до касания упора 16 в ножку 9 поручня 10, а ролик 13 упирается в рамку 8 (фиг, 10), После этого включают пневмоцилиндр 36, ко- торьй начинает поворачивать рычаги 18, кинематически связанные между собой. При повороте рычага 18 ползун 23 с рамкой 8 поднимается вверх. Рамка 8 упирается в ролик 13, зафиксированный на трубе 11 поручня 10, Поручень 10, соединенный ножками 9 с фланцем 5, отрьюает полуфорьгу 3 от изделия с последующим, отрывом изделия от полуформы 1, так как на изделии есть поднутрение - зацеп с полуформой 3, После окончания поворота рычага 18 перемещают вручную шкворень 26 в средней стойке 17 и освобождают среднюю проушину 25 рамки 8, Поворачивают рамку 8 с полуформой 3 вокруг двух стоек 17 и извлекают готовое изделие.
Такое конструктивное решение позволяет за счет нелинейности движения ползуна упростить конструкцию устройства, обойтись одним приводом.
Использование только одного устройства открытия и стягивания полуформ предлагаемой конструкции по сравнению с известной за счет обеспечения возможности использования только одного привода позволяет значительно
упростить его конструкцию и повысить надежность в два раза.
Кроме того, предлагаемое устройство позволяет увеличить производи- тельность труда и сократить время операции стягивания и открытия полуформ в 2-3 раза, а также обеспечивает более полное смыкание фланцев полуг орм, что уменьшает величину облоя, в результа-ю те улучшается качество изделий на 25-30%.
Устройство может найти широкое при- ,менение на других полуформах, так какJ5 установку стоек можно производить по контуру даже на сложных по конфигурации полуформах. Стойки выполнены унифицированными.
Формулаизобретения
Устройство открытия и стягивания Полуформ, содержаш;ее рамку, кинема- 11ически связанную с малыми плечами двуплечих рычагов, установленных на основании нижней полу(|)ормы, причем
5
0
5
большие плечи рычагов кинематически соединены между собой, и приводом, отличающееся тем, что, с целью упрощения конструкции и повышения ее надежности, малое плечо каждого рычага снабжено роликом, установленным с возможностью взаимодействия с дугообразной направляющей, выполненной в крийошипе кривошипно- ползунного механизма, ползун которого шарнирно соединен с прессующей рамкой, при этом взаимно перпендикулярные оси поворота рычага, кривошипа и направляющей ползуна, расположенные в стойке, установленной на одном основании с нижней полуформой, лежат в одной плоскости и точка их пересечения лежит на оси ролика, боль- шое плечо рычага соединено с противоположных сторон с двумя кольцами, расположенными радиально относительно оси поворота рычага и шарнирно связанными с кольцами других стоек звеньями, установленными относительно оси поворота рычага на одинаковом расстоянии.
/7

| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТОПЕДИЧЕСКОЕ ТРЕНИРОВОЧНОЕ УСТРОЙСТВО | 1993 |
|
RU2084255C1 |
| ПАССАЖИРСКИЙ МИНИ-ЛИФТ | 1992 |
|
RU2081047C1 |
| Устройство для тренировки мышц | 1990 |
|
SU1704800A1 |
| Грузовая тележка | 1988 |
|
SU1505828A1 |
| Привод поручня эскалатора | 1987 |
|
SU1481181A1 |
| ЛЕЕРНОЕ ОГРАЖДЕНИЕ | 2004 |
|
RU2280583C1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2327328C1 |
| ДВЕРЬ-ТРАП ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2789486C1 |
| Складная аппарель бытового и эвакуационного назначения | 2015 |
|
RU2610937C1 |
| ДВЕРЬ-ТРАП ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2389643C2 |
Изобретение относится к оборудованию для переработки полимерных материалов и может быть использовано для открытия и стягивания пресс-фор- мь1. Цель - упрощение конструкции и повьшенне надежности работы. Дпя этого малое плечо каждого рычага 18 снабжено роликом 19, установленным с возможностью взаимодействия с дугообразной направляющей 20 Направляющая выполнена в кривошипе 21 кривошипно- шатунного механизма. Ползун 23 механизма шарнирно соединен с прессующей рамкой 8. Взаимно перпендикулярные оси поворота рычага, кривошипа и на-; правляющей ползуна лежат в одной плоскости и точка их пересечения лежит на оси ролика. Большое плечо рычага 18 соединено с противоположных сторон с двумя кольцами 32.Кольца шарнирно связаны с кольцами других стоек звеньями, установленными относительно оси поворота на одинаковом расстоянии. 17 ил. ч , - О) 00 со сд ел со
Фиг.1
J
Физ.5
5г
(риг. 6
фиг,7
ВидЖ
27 Ji
Фи,г.1
20
Фил, 15
&J.R
Флз.№
Фиг.17
| Устройство для разъема прессформ | 1975 |
|
SU582976A1 |
| Солесос | 1922 |
|
SU29A1 |
