И/2 7/ 7J 33 19 22 20 21
55M3J 7 5
.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поручня эскалатора | 1985 |
|
SU1393745A1 |
| Привод замкнутой гибкой тяги транспортирующей машины | 1985 |
|
SU1286493A1 |
| Привод поручня эскалатора | 1987 |
|
SU1481182A1 |
| Привод поручня эскалатора | 1983 |
|
SU1127831A1 |
| Натяжное устройство поручня эскалатора | 1983 |
|
SU1127832A1 |
| Натяжное устройство гибкого тягового органа | 1976 |
|
SU644989A1 |
| Привод поручня эскалатора | 1983 |
|
SU1123981A1 |
| Натяжное устройство тягового органа конвейера | 1984 |
|
SU1221095A1 |
| Поручневое устройство эскалатора | 1982 |
|
SU1224237A1 |
| Баровая машина УБМ-9 | 1985 |
|
SU1357505A1 |
Изобретение относится к подъемно-транспортному машиностроению ,в частности, к приводу поручня эскалатора. Цель изобретения - повышение надежности работы привода путем уменьшения резкого изменения натяжения тягового органа при пуске, остановке и изменении направления движения эскалатора. При вытяжке поручня 2 рама 16 опускается винтами 19 ниже, в результате чего осуществляется компенсация вытяжки поручня. Прижатие ремня 4 к поручню 2 с силой, необходимой для создания тягового усилия, осуществляется роликами 23 при натяжении цепи 26 поворотом рычагов 29. 7 ил.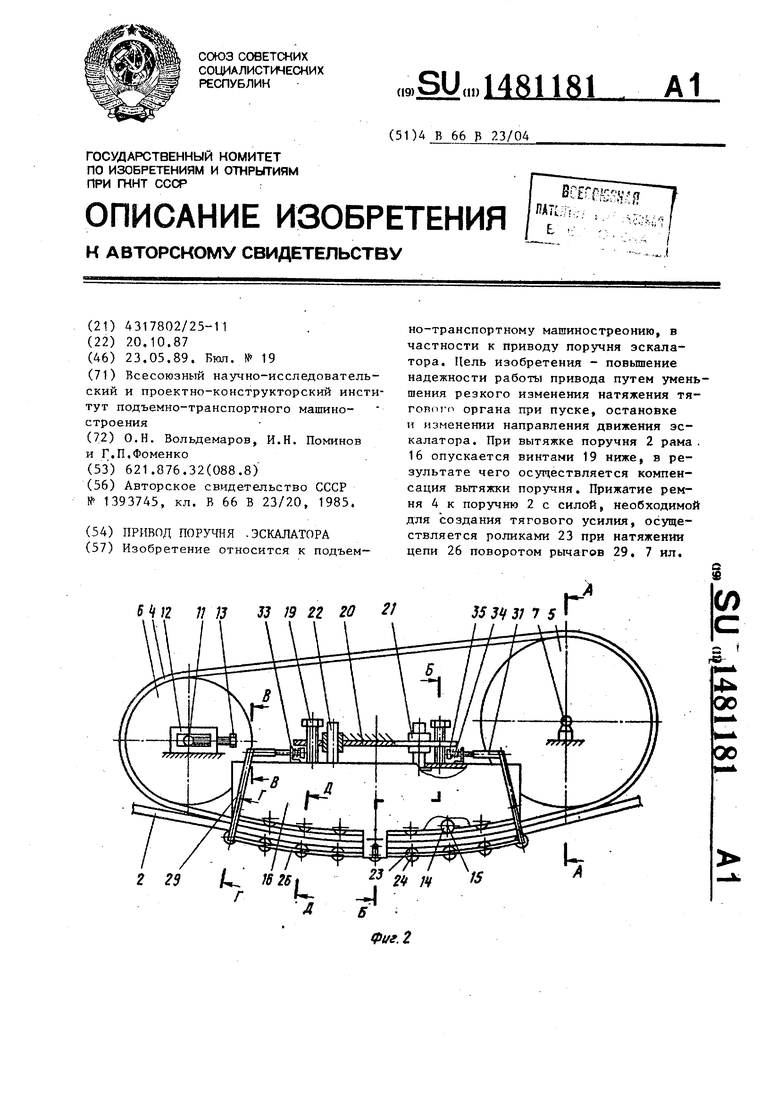
г 23
з I
гв- Ј
00
00
Фиг. 2
Изобретение относится к подъемно- транспортному машиностроению, а именно к приводу поручня эскалатора.
Цель изобретения - повышение надежности работы привода путем уменьшения резкого изменения натяжения тягового органа при пуске, остановке И изменении направления движения эскалатора.
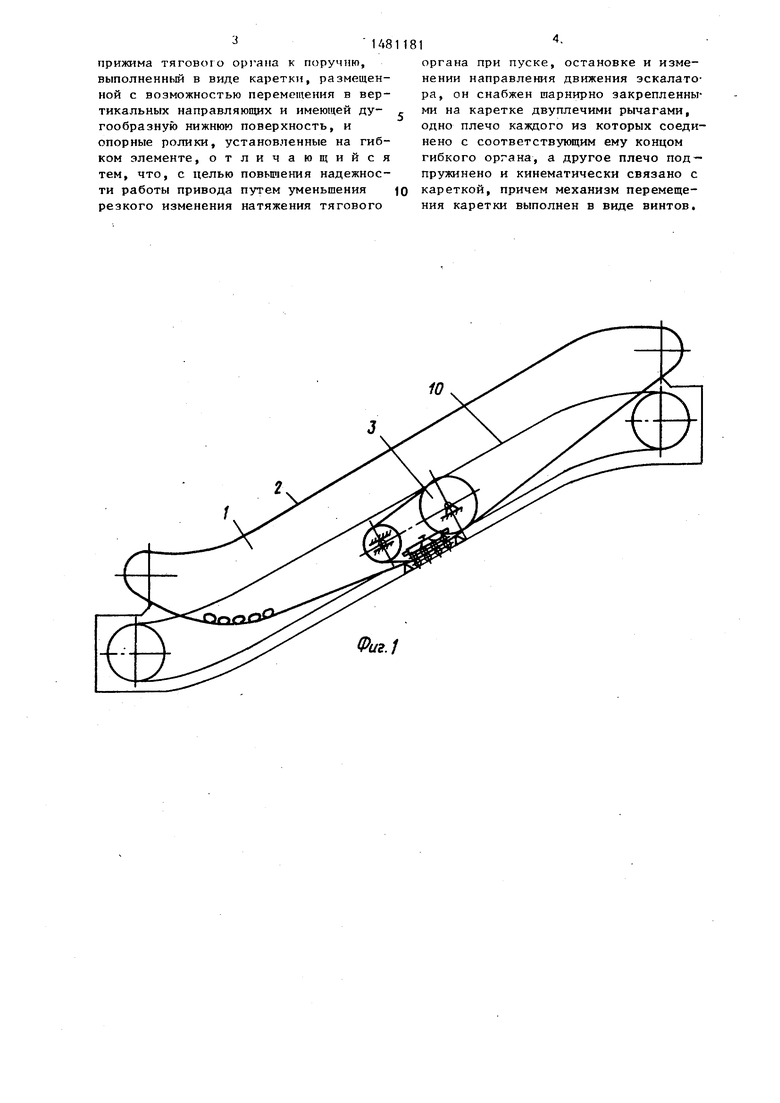
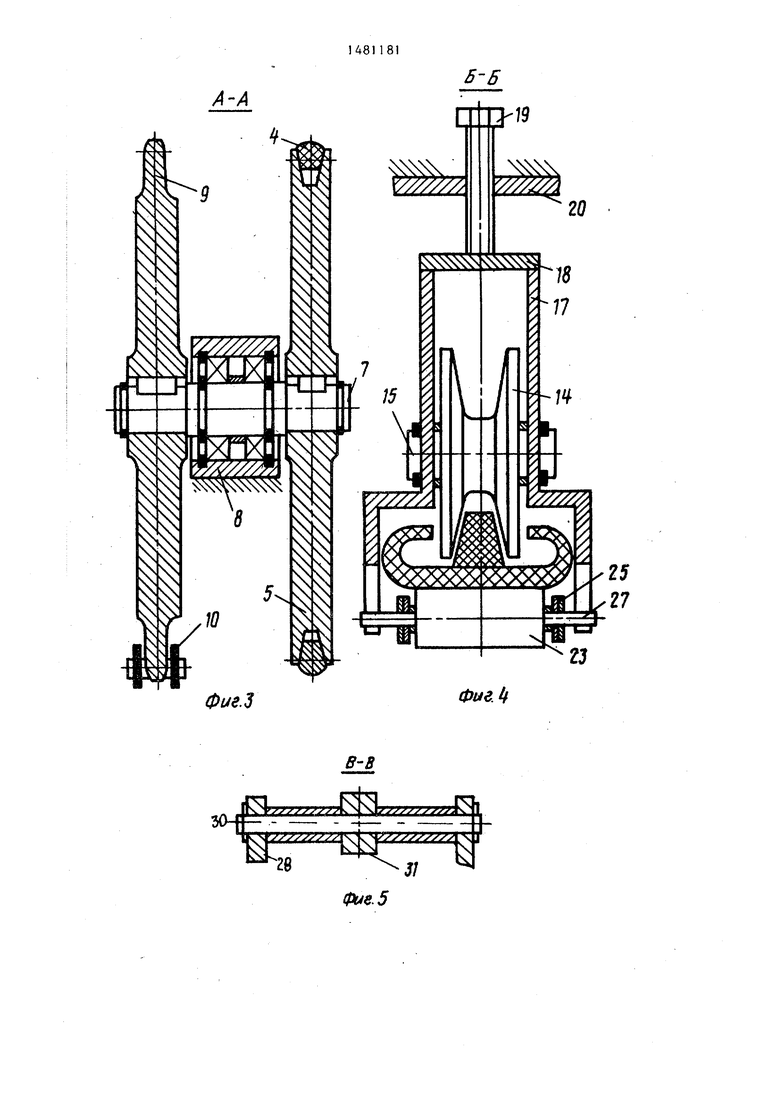
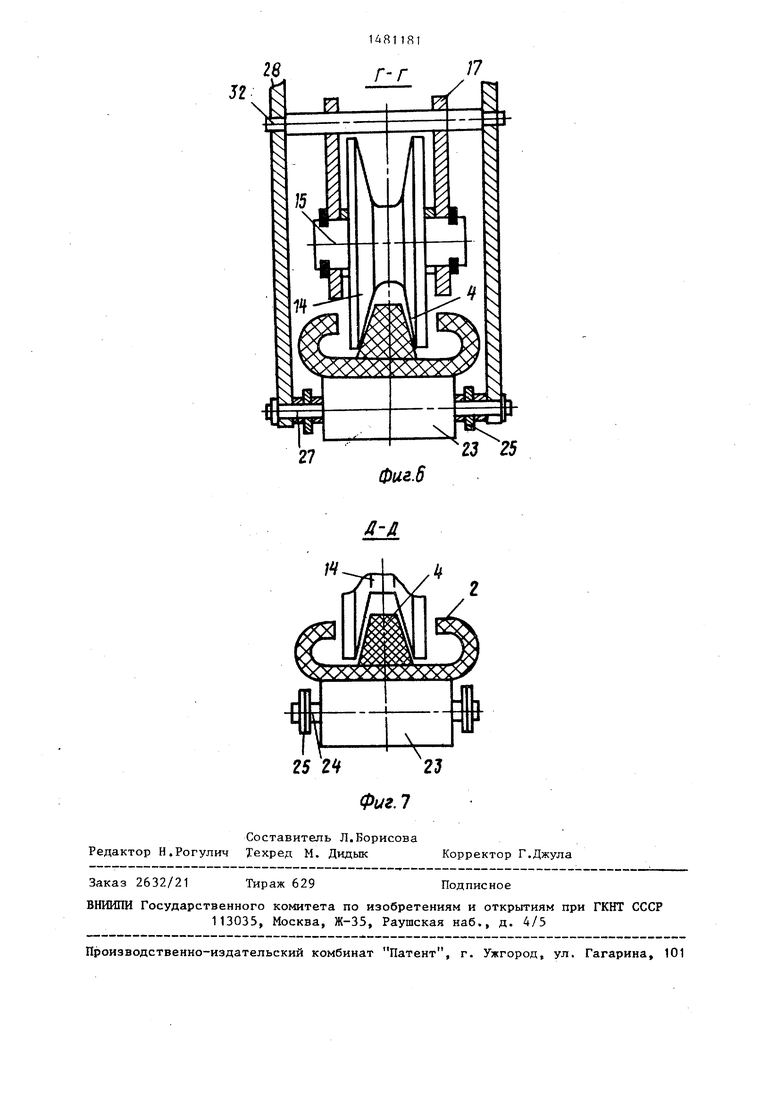
На фиг. 1 показан эскалатор с установленным на нем приводом поручня эскалатора, общий вид} на фиг. 2 - Привод поручня эскалатора, общий вид; ta фиг, 3 - разрез А-А на фиг. 2j Ца фиг. 4 - разрез Б-Б на фиг,2 на ф|иг, 5 - разрез R-B на фиг.2 на фиг. 6 - разрез Г-Г на фиг.2; на фиг.7 - разрез Д-Д на фиг.2.
В эскалаторе 1 поручень 2 имеет Привод 3, расположенный в наклонной асти его холостой ветви. Привод 3 редставляет собой вертикально замкнутый гибкий орган в виде клинового ремняе нижняя ветвь которого на приводном участке расположена в межбор- toBOM просвете поручня 2. Ремень 4 огибает приводной 5 и натяжной 6 блоки, укрепленные на металлоконструкции Эскалатора. Приводной блок 5 жестко установлен на конце вала 7, посредине которого расположена связанная с еталлоконструкцией опора 8, На противоположном конце вала 7 жестко ус- тановлена звездочка 9 отбора мощности от тяговой цепи 10 эскалатора 1. Натяжной блок 6 установлен на оси 11, способной перемещаться по горизонтальному пазу опоры 12 под действием винта 13. Б зоне примыкания к поручню 2 ремня 4 находятся кбнтакти рующие с ремнем ролики 14, оси 15 которых закреплены на раме 16 вдоль ее нижней дугообразной поверхности, выпуклой в сторону поручня.
Рама 16 имеет П-образное сечение, состоящее из двух боковых вертикальных планок 17 и верхней горизонтальной планки 18. В планку упираются два установленных симметрично относительно центральной оси рамы 16 винта 19, проходящих через отверстия в планке 20, укрепленной на металлоконструкции эскалатора. Рядом с винтом 19 через отверстия в планке 20 проходят закрепленные на ней втулки - 21, расположенные симметрично винтам 19. Через втулки 21 проходят штыри 22, закрепленные на планке 18
5
рамы 16. Находящиеся под поручнем 2 против каждого из роликов 14 ролики 23, установленные на осях 24, наде- тых на концы осей планками 25, связаны в цепь 26. Удлиненная ось 27 среднего в цепи 26 ролика 23 своими концами входит в вертикальные пазы планок 17 рамы 16. На концы оси 27 каждого из кр айних в цепи 26 роликов 23 надеты отверстиями своего нижнего конца планки 28 рычага 29. Через отверстия в верхнем конце планок 28 проходит закрепленная на планках ось 5 30, посредине которой проушиной своего конца на ось надета тяга 31. Между верхним и нижним отверстиями в каждой из планок 28 имеется отверстие, которым эти планки надеты на концы 0 оси 32, выступающие за планки 17 рамы 16, на которой закреплены оси 32. Тяга 31 на конце, противоположном проушине, на которой она надета на ось 30, имеет резьбу. Ее резьбовой конец проходит сквозь отверстие в уголке 33, который прикреплен к планке 18. Уголки 33 установлены симмет рично центральной оси рамы 16, а на проходящие через отверстия в уголках 0 концы тяг 31 надеты пружины 34, примыкающие к уголку, и затем гайки 35.
Вместо клинового ремня 4 в качестве приводного органа может быть использована цепь с прикрепленными к 5 ней кусками плоского ремня или ролики.
Перед пуском конвейера винтами 13 и 19 осуществляется установка блока 6 и рамы 16 в такое положение, при 0 котором обеспечивается необходимое Сцепление ремня 4 с приводным блоком 5, а также предварительное прижатие ремня 4 к поручню 2. При вытяжке поручня 2 рама 16 опускается винтами 5 19 ниже, в результате чего осуществляется компенсация вытяжки поручня. Прижатие ремня 4 к поручню 2 с силой, необходимой для создания тягового усилия, достаточного для сообщения поручню движения, синхронного полотну эскалатора, осуществляется роликами 23 при натяжении цепи 26 поворотом рычагов 29 вокруг осей 32 под действием тяг 31, на которых завинчиванием гаек 35 сжимаются пружины 34. Формула изобретения Привод поручня эскалатора, содержащий тяговый орган, огибающий приводной и натяжной блоки, механизм
0
5
прижима тягового органа к поручню, выполненный в виде каретки, размещенной с возможностью перемещения в вертикальных направляющих и имеющей дугообразную нижнюю поверхность, и опорные ролики, установленные на гибком элементе, отличающийся тем, что, с целью повышения надежности работы привода путем уменьшения резкого изменения натяжения тягового
органа при пуске, остановке и изменении направления движения эскалатора, он снабжен шарнирно закрепленными на каретке двуплечими рычагами, одно плечо каждого из которых соединено с соответствующим ему концом гибкого органа, а другое плечо подпружинено и кинематически связано с кареткой, причем механизм перемещения каретки выполнен в виде винтов.
10
Фиг.1
со
00 r
///////////sfflУ//////////
T)
I
2в
Составитель Л.Борисова Редактор Н.Рогулич Техред М. Дидык Корректор Г.Джула
Заказ 2632/21
Тираж 629
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
17
42J 25
фиг.6
Подписное
| Привод поручня эскалатора | 1985 |
|
SU1393745A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
