(Л
со
со О)
со
со
О5
/г
Изобретение относится к сельскохозяйственному машиностроению, в частности к хлопкоуборочным аппаратам
Цель изобретения - повышение эф- фективности работы за счет переформирования кусков хлопчатника.
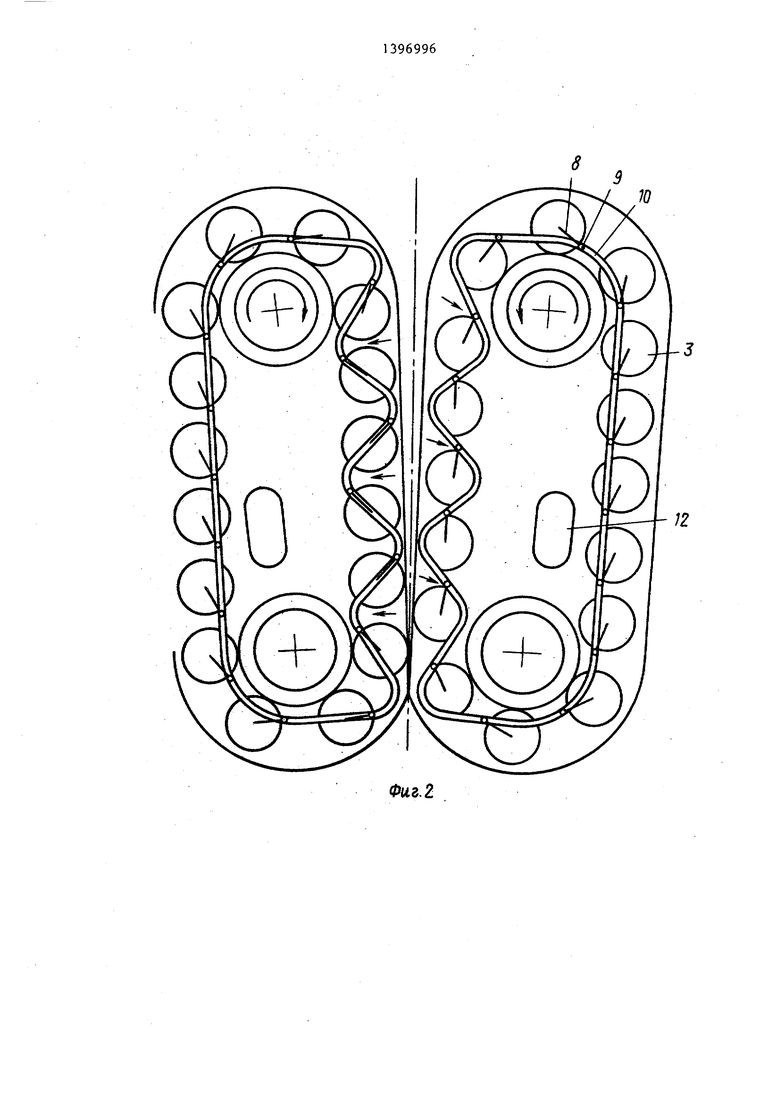
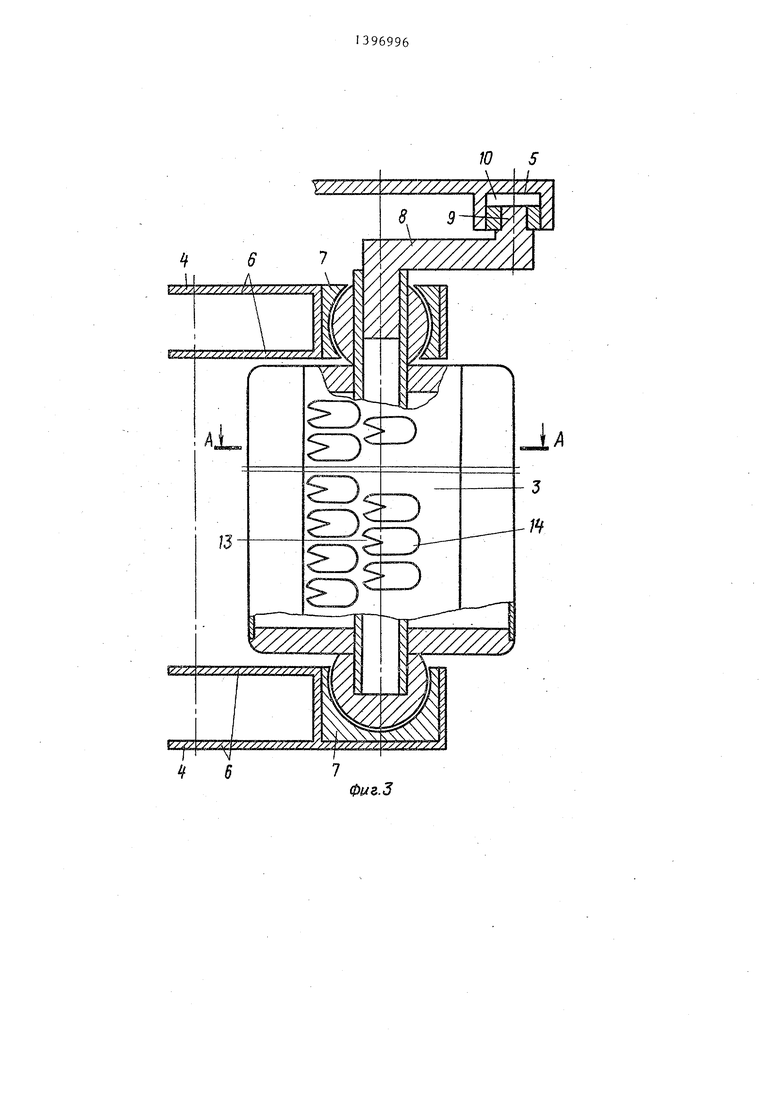
На фиг.1 представлен хлопкоуборочный аппарат, вид сверху; на фиг.2 - вид на направляющую дорожку; на фиг.З - шпиндель хлопкоуборочного аппарата; на фиг.4 - разрез А-А на фиг.3.
Хлопкоуборочный аппарат содержит установленные симметрично с образованием рабочей ш;ели секции 1 и 2, несущие хлопкозахватные органы - шпиндели 3, установленные с возможностью вращения на транспортерных цепях 4, которые приводятся в движение через звездочки от валов, смонтированных на каркасе 5 аппарата. Звенья цепи 4 на внешней стороне имеют удлинение в виде пластин 6 с отверстиями для седел 7, куда устанавливаются шпиндели 3, оси 8 которых вьтол- нены в верхней, части коленчатыми и имеют ролик 9. На каркасе 5 аппарата выполнена направляющая дорожка 10, в которзпо установлены с возможностью продольного перемещения ролики 9 осей 8 шпинделей 3. Направляющая дорожка 10 в рабочей щели выполнена волнообразной, например, в виде сопряженных колец, что обеспечивает колебание шпинделей 3 от О до 180. В полости транспортерных цепей 4 размещены пневматические хлопкоприемные камеры 11 с выводным окном 12. Шпиндель 3 может иметь две плоскости с зубьями 13 и нишами 14, при этом каждая прямолинейная плоскость с зубчатыми нишами при колебаниях шпинделя 3 имеет свое окно 15 для протаскивания сырца в-камеру 11 сброса, образованное зазором между поверхностями смежных шпинделей 3. В окно 15 может протаскиваться сырец одновременно двумя зубчатыми прямолинейными плоскостями при вращении пары шпинделей в противофазе (фиг.2) а при вращении пары шпинделей 3 в фазе одна зубчатая плоскость захваты0
0
5
0
5
0
5
0
вает и протаскивает в окно 15 сырец в камеру 11 сброса, другая зубчатая плоскость возвращается в исходное положение. Между валами в корпусе установлен механизм 16 натяжения цепей 4, который может быть винтовым.
Хлопкоуборочный аппарат работает следующим образом.
При движении хлопкоуборочной машины вдоль ряда хлопчатника .кусты растений проходят в рабочую щель с линейной скоростью, равной линейной скорости шпинделей 3, при деформации кустарника раскрытые коробочки попадают в ниши 14 с зубчиками 13 шпинделей 3, которые с начала рабочего участка колеблются и протаскивают захваченный сырец сквозь приемные окна 15 в камеру 11, откуда хлопок поступает в выводное окно 12. По мере продвижения в рабочей щели каждый шпиндель 3 производит несколько колебательных движений, число которых зависит от выбранного профиля дорожки 1 О и диаметра шпинделя 3. Вращение шпинделей 3 может быть как попарно противофазным, так и независимым. При этом эффективность обработки кустов обеспечивается постоянным переформированием кустов хлопчатника в рабочей щели.
Формула, изобретения
Хлопкоуборочный аппарат, содержащий установленные симметрично с образованием рабочей щели секции с хлоп- козахватными органами, смонтированными на вертикальных осях с возможностью вращения на горизонтальных транспортерных цепях, в полости которых установлены пневматические хлопкоприемные камеры, отличающийся тем, что, с целью повьш)е- ния эффективности работы за счет переформирования кустов хлопчатника, каждая секция имеет установленную на каркасе волнообразную в рабочей щели направляющую дорожку, а ось .каждого рабочего органа выполнена коленчатой и имеет ролик, установленный с возможностью продольного перемещения в направляющей дорожке.
Ю
12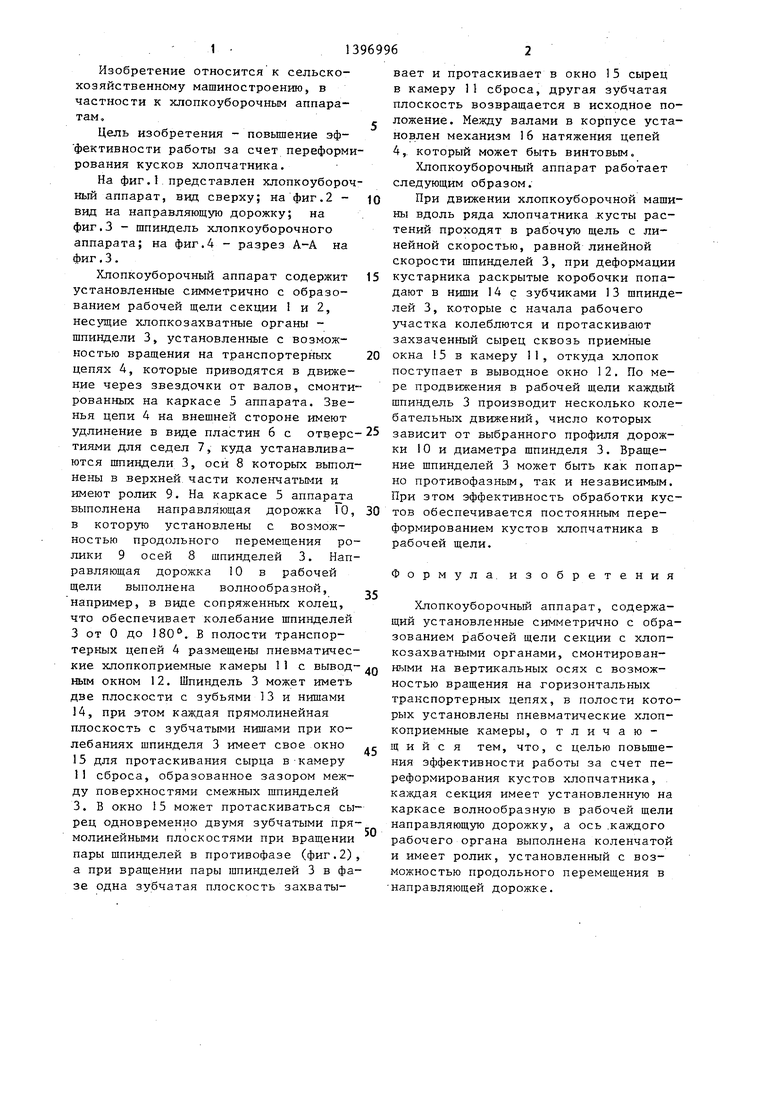
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1989 |
|
SU1752261A1 |
| Секция хлопкоуборочного аппарата | 1986 |
|
SU1375173A1 |
| Хлопкоуборочный аппарат | 1981 |
|
SU1028271A1 |
| Способ уборки хлопка-сырца | 1987 |
|
SU1628918A1 |
| Секция хлопкоуборочного аппарата | 1989 |
|
SU1687088A1 |
| Вертикально-шпиндельный хлопкоуборочный аппарат | 1980 |
|
SU902687A1 |
| Пневматический хлопкоуборочный аппарат | 1989 |
|
SU1746933A1 |
| Хлопкоуборочный аппарат | 1981 |
|
SU978771A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1371592A1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1775066A2 |
Изобретение относится к области сельскохозяйственного машиностроения и позволяет повысить эффективность работы хлопкоуборочного аппарата за счет переформирования кустов хлопчатника. Аппарат содержит установленные с образованием рабочей щели секции 1,2 со шпинделями 3, установленными с возможностью вращения на транспортерных цепях 4. На каркасе 7 аппарата установленанаправляющая для шпинделей 3 дорожка, волнообразная в рабочей щели, при продвижении по которой шпиндели 3 осуществляют колебательные движения. 4 кп.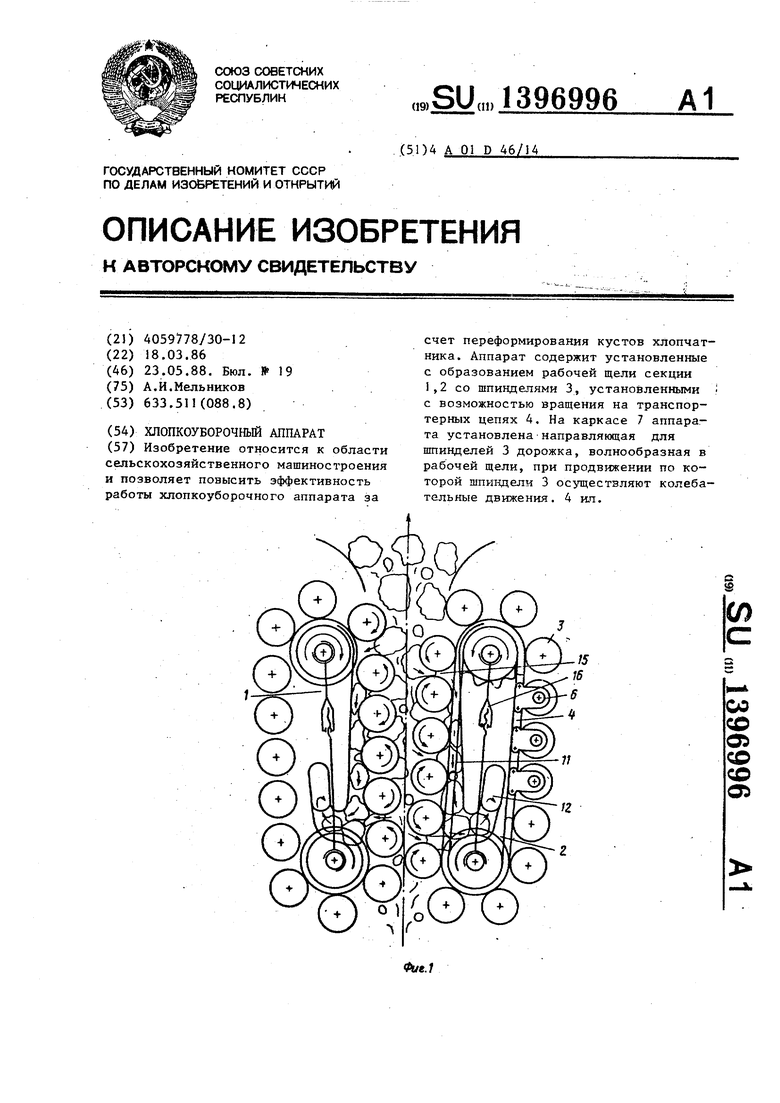
Фиг. 2
ю
//////Л7////////7/ /.
А///
фцг.З
/4
/J
7
Фиг. 4
