(Ш.
(,1
. ;4
9:гз
в, f,
i. , VT I v-iCi-l А л I
,
г/ Ч.. v-iN /- %(
00
сл
со ьо
9:. , VT I v-iCi-l А л I
/ ,
г/ Ч.. v-iN /- %(
9
Изобретение относится к об;1асти сельскохозяйственного машиностроения, в частности к хлопкоуборочным машинам.
Цель изобретения - иовышсние эффективности сбора хлопка за счет одновременного контакта наибольшего количества шнин- дслей с кустами хлопчатника.
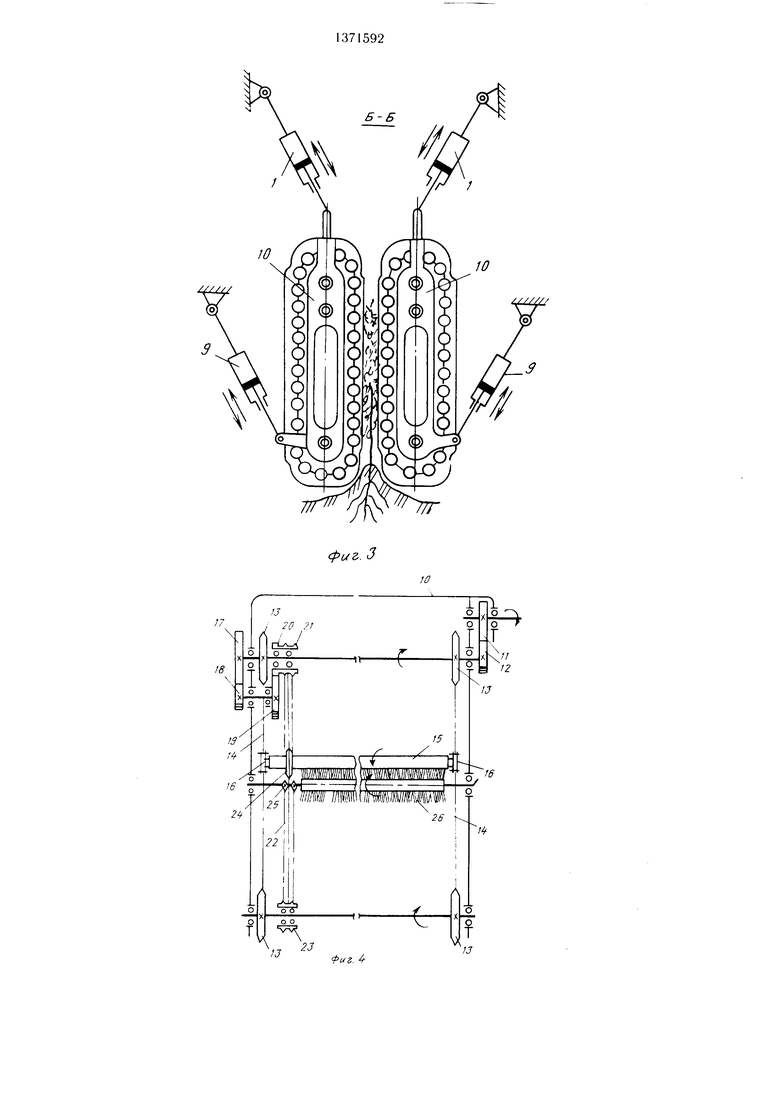
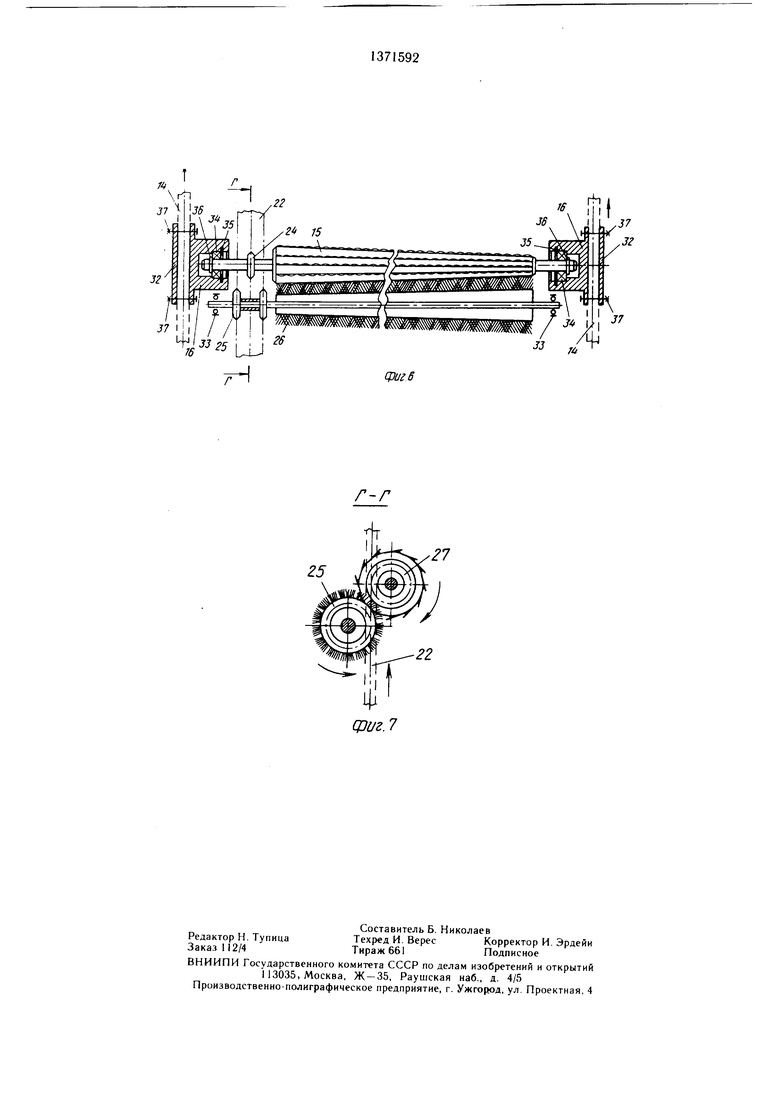
На фиг. 1 изображен хлопкоуборочный аппарат, вид сбоку; на фиг. 2 вид Л на фиг. 1; на фиг. 3 -- сечение Б-Б на фиг. 1; на фиг. 4 - кинематическая схема хлон- коуборочного аппарата; на фиг. Г) сечение В-В на фиг. 1; на фиг. б - схема расположения шнинделя со съемника.ми; на (}1иг. 7 - сечение Г-Г на фиг. 6.
Хлопкоуборочный аппарат включает в себя гидросистему 1 для ПОДТЛУМУ и опускании ainiapaTa. Устройство имеет быслро- с 1)емные ог раждения 2 и 3 для облегчения доступа механика-водителя к узлам и деталям, расноложенны.м внутри aniiapaia, при необходимости регу. шровки II,1M ;|. :4амсне, а также для технического OCMOIIJU Кусто- направите;1и 4 служат для 1одье1 1а и направления кустов хлопчатника, лежащих на земле. Устройство 5 пеобх((дим() для поддержания взаимосвязи между нм1.ефом и хлонкоубо(Н)Ч11ым аппаратом. Инсвмо транспортные системы 6 и 7 1 редназначен1.1 д,|я и ред,ачи в бункер co6)aH)ii)id хлопка из нижних и верхних ярусов. Рабочее Ko, ie- с(.) S служит для обеспечения ()дног,)емеп,чого контакта наибольшего количесгна шпиндо- . 1ей с кустами х;1ог1чатника.
Аппарат имеет также ид)оспстему 9 для регулирования рабочей .c.:iii.
На ра.ме 10 (фиг. 3) мопги)ук)тся рабочие детали и узлы х.юнкоуборочного аппарата. На промежуточном валу устано). рос ьемп)1е 1нестерни 11 и 12, прс.шазначеи- п)1е для изменения режима раГчиь )aia н зависимости от раскрытия коробочек хлопка (фи1 4). Звездочки 13 обеспечивают движение пени 14, к котор(.)й крепя1ся н 1 инде- ли 15 парнирными опорами 16. Быст})ос1.ем- ные П1есте ни 17 и 18 обеспечиваю скоростные режимы Рабочих о|Л анони1пииде- лей 15.
Шестерни 18 и 19 установлены на втором рабочем валу, иестерня 20 с ведущей блок- звездочкой 21, трехрядная цепь 22, и ведомам б иж-звездочка 23 устанон:1епы на дру- ()м iuM(jMOM валу. Звездочка 24, жестко нрик)епленная к ншинделю 1о. с.|ужит для передачи врап1ения от г)ехрядной пени 22 к н нинделю 15. Звездочка 25 осуп1ествляет движение с ьемников 26 (фиг. 5), установленных в два ряда на всю высоту рабочих органов шпинделей 15. Скоростные движения съемников 26 обеспечивают также Hie- стерни 17 и 18. Верхняя 27 и нижняя 28 секции образуют нриемную камеру 29, установленную между рядами съемников 26. .Между рабочими органами образуется П1ель 30.
Камера 29 выполнена с окнамн 31. Хлопковое волокно попадает в верхнюю 27 и нижнюю 28 секции приемной камеры 29 через окна 31. Соединительная пластина 32 для цени 14 предназначена для закрепления шарнирной опоры 16, шпинделя 15. Опор.ный подшипник 33 установлен на раме 10 аппарата для обеспечения вращения вала шпинделя 15.
Для подшипников 34 служат опорные 35 и 36 (фиг. 6). Пластина 32 с шарнирной опорой 16 соединена штырьками 37.
Х. юнкоуборочный аппарат работает следующим образом.
При движении трактора от вала отбора 5 мопиюсти вращение передается через шестерни 11 и 12, звездочки 13 и цепь 14, на которой через шарнирные опоры 16 закреплены нлшндели 15.
Шпиндели 15 зубцами вкалываются в хлопок-сырец, захватывают волокно, не ус0
невая гишернуться на 180°, и сразу же нод- вергаются воздействию съемников 26, которые при соприкосновении со шпинделями 15 не позволяют им намотать на себя волокно,
5 ак как вран1аются с большей угловой скоростью по отношению к угловой скорости нишнделей. (уьемники 26 снимают хлопковое волокно со шпинделей и сразу переносят его к окнам 31 верхней 27 и нижней 28 секций приемной камеры, где волокно подхва0 тывается воздушным потоком и заносится в нрнемную камеру 29. Затем через пневмо- транспортные системы 6 и 7 волокно поступает в секции бункера. Гидросистемы 1 позволяют управлять аппаратом из кабины при опускании и подъеме, а также регули5 ровать угол наклона аппарата относительно пг)верхности поля. Гидросистемой 9 регулируют рабочую щель 30 из кабины машины.
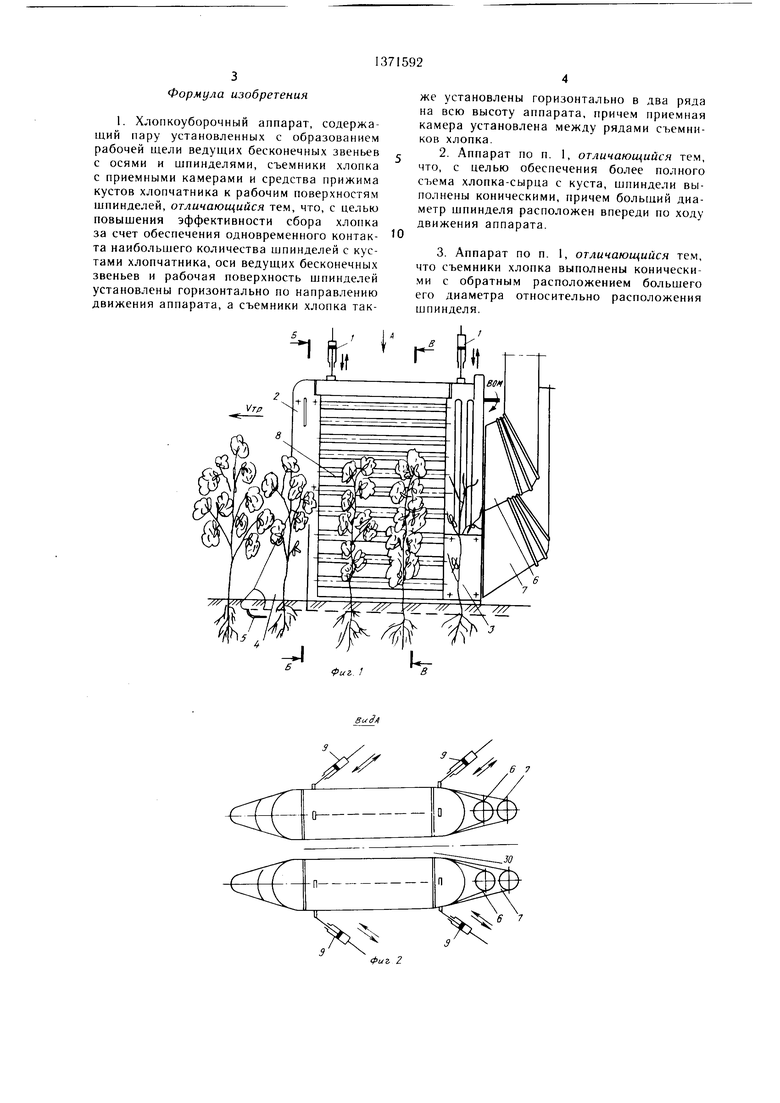
В отличие от известных в предлагаемом аппарате оси вращения ведущих бесконеч0 ных звеньев и рабочая поверхность шпинделей установлены горизонтально по направлению движения трактора. Съемники также установлены горизонтально в два ряда на всю высоту рабочего аппарата, а между
5 рядами съемников установлена приемная камера. Шпиндели выполнены коническими, причем больший диаметр шпинделя расположен впереди, по ходу движения аппарата, с ьемники также выполнены коническими с обратным расположением диаметров от0 носительно расположения шпинделей. В этом случае ликвидируется опадание хлопка на землю, потому что длина окружности в начале захвата больше, чем в его конце. За счет обеспечения одновременного контакта наибольшего количества шпинделей
5 с кустом хлопчатника повышается качество собираемого хлопчатника ликвидируются забои шпинделей и приемных камер, сокращаются простои хлопкоуборочной машины.
Формула изобретения
1. Хлопкоуборочный аппарат, содержащий пару установленных с образованием рабочей пдели ведущих бесконечных звеньев с осями и шпинделями, съемники хлопка с приемными камерами и средства прижима кустов хлопчатника к рабочим поверхностям щпинделей, отличающийся тем, что, с целью повыщения эффективности сбора хлопка за счет обеспечения одновременного контакта наибольщего количества шпинделей с кустами хлопчатника, оси ведущих бесконечных звеньев и рабочая поверхность щпинделей установлены горизонтально по направлению движения аппарата, а съемники хлопка так
же установлены горизонтально в два ряда на всю высоту аппарата, причем приемная камера установлена между рядами съемников хлопка.
2.Аппарат по п. 1, отличающийся тем, что, с целью обеспечения более полного съема хлопка-сырца с куста, шпиндели выполнены коническими, причем больший диаметр шпинделя расположен впереди по ходу движения аппарата.
3.Аппарат по п. 1, отличающийся тем, что съемники хлопка выполнены коническими с обратным расположением большего его диаметра относительно расположения
шпинделя.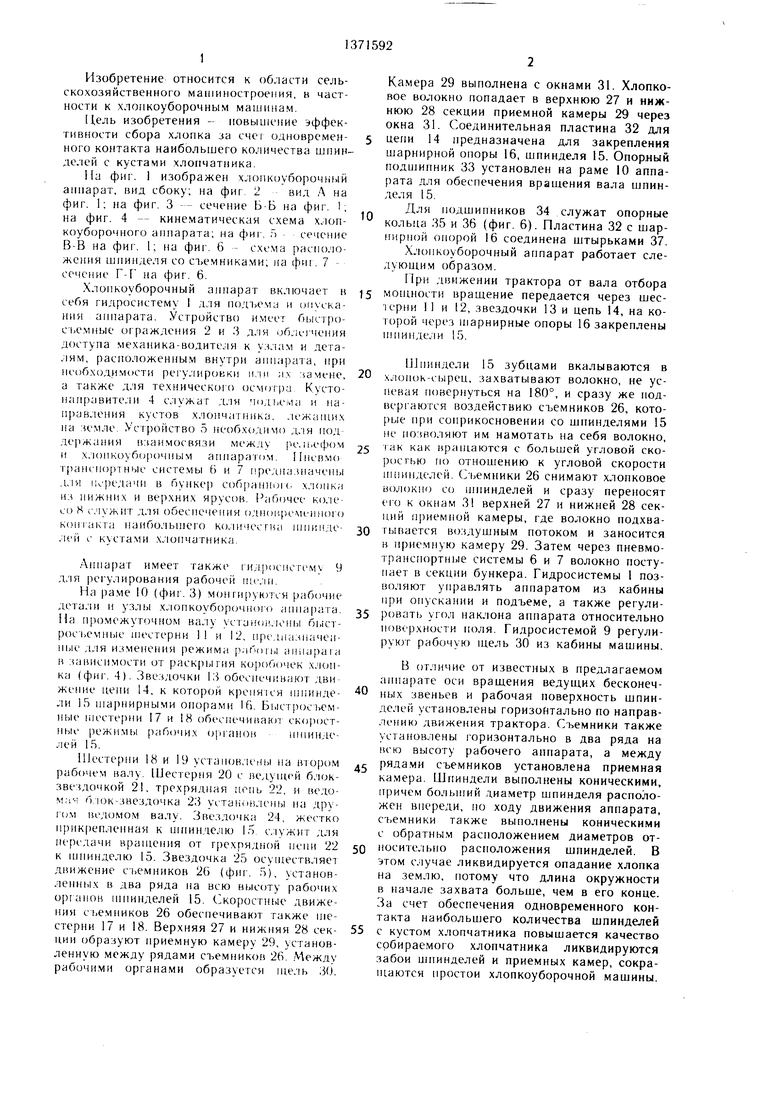
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндель хлопкоуборочного аппарата | 1985 |
|
SU1289415A1 |
| Хлопкоуборочный аппарат | 1990 |
|
SU1789111A1 |
| Горизонтально-шпиндельный хлопкоуборочный аппарат | 1985 |
|
SU1428267A1 |
| Пневматический хлопкоуборочный аппарат | 1989 |
|
SU1746933A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 2005 |
|
RU2300186C2 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1743457A1 |
| Шпиндель хлопкоуборочного аппарата | 1990 |
|
SU1808246A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1545994A1 |
| ХЛОНКОУБОРОЧНЬШ АППАРАТ^*51Г»у'Г? i•5••'!•;^; ~ПТ(^|Фугш cK.u.^uhul | 1972 |
|
SU435784A1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1752261A1 |
Изобретение относится к области сельскохозяйственного машиностроения. Целью изобретения является повышение эффективности сбора .хлопка за счет обеспечения (удповременного контакта наибольшего количества uiHHH. ic. iefi (III) с кустом хлопчатника. Хлопкоуборочный аппарат (ХА) содержит ),чму (), па которой установлена пара бесконечных рабочих органов со Ш 15 с образованием рабочей щели между ними. Оси враш,ения рабочих органов и рабочая поверхность Ш 15 установлены горизонтально по направлению движения. Съемники 26 также установлены горизонтально в два ряда па всю высоту ХА для мгновенного съема хлопкового волокна и одновременного переноса его к окнам 31 нижней 28 и верхней 27 секций приемной камеры, установленной между рядами съемников 26. 1И 15 выполнены коническими, причем больн1ИЙ диаметр их расположен впереди по ходу движепия ХА. Съемники 26 - тоже конические, но их диаметральное расположение обратно относительно расположения Ш 15. В процессе работы ХА Ш 15 зубцами вкалываются в хлопок, захватывают волокно. Съемники 26 снимают хлопковое во,токно со Ш и переносят его к окнам 31 вер.хней 27 и нижней 28 секций приемной ка.меры, где оно подхватывается воздуц ным потоко.м и запосится в нриемпую камеру 29. 2 з. п. ф-лы, 7 ил. SP сл
6 7
фиг Z
фиг. 3
J
/7
IB
WJ
3
6
2
25
f
. - x
/J
1
1
u
Т
tZ
/J
15
26 Ь
-e
v(
;j
25
37
л
Фигб
