со
00 О
а ее
5
Изобретение относится к управлению электрическими машинами и может быть использозано при создании приводов компрессоров и насосов.
Цель изобретения - повышение КПД обеспечения резонансного режима работы при изменении нагрузки.
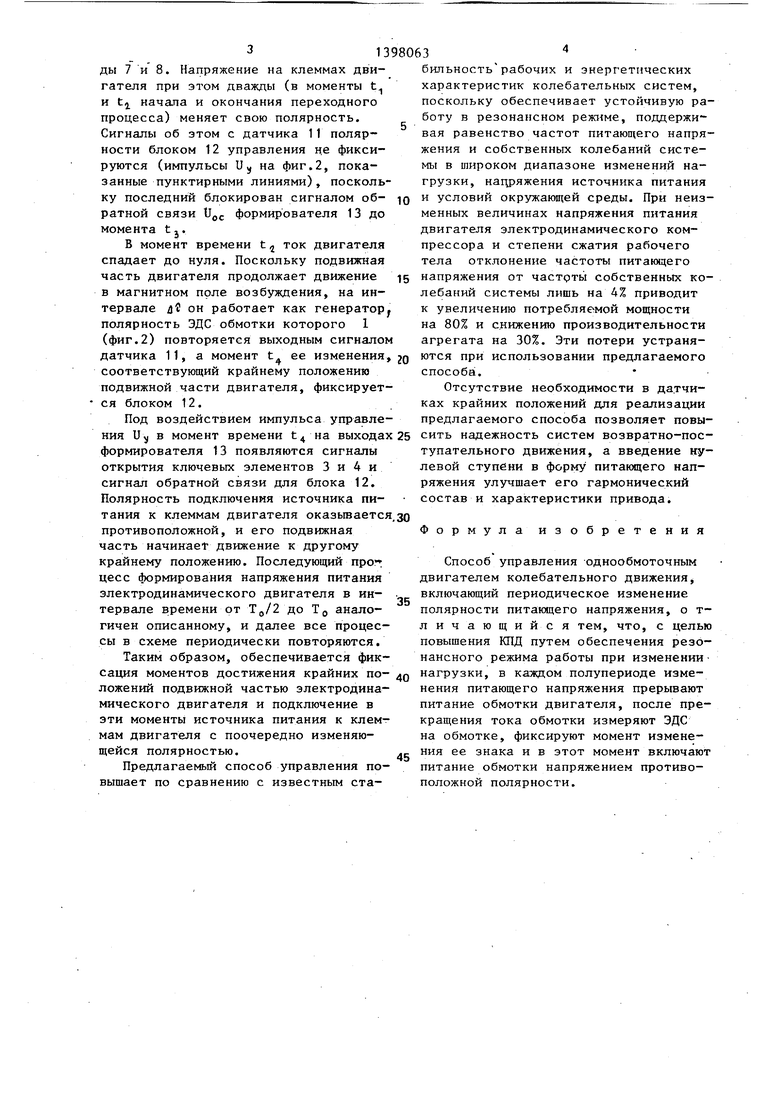
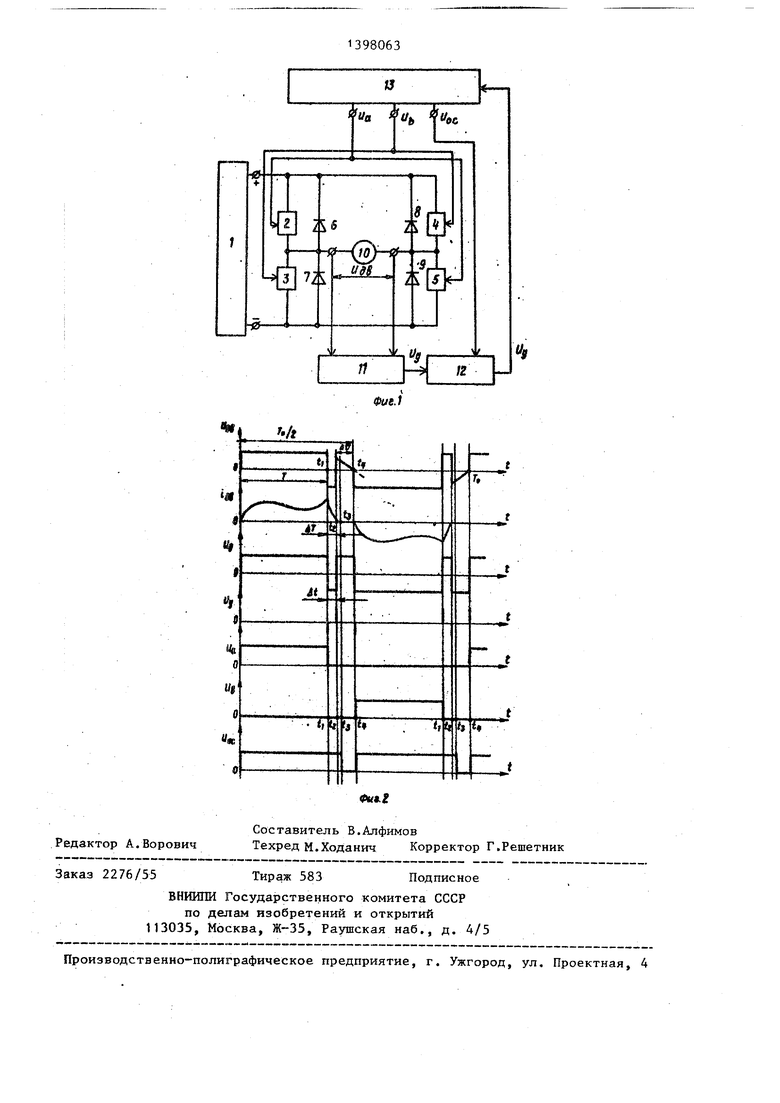
; На фиг.1 приведена блок-схема устройства, реализующего способ; на ю фиг.2 - временные диаграммы.
Устройство для питания электродинамического двигателя привода колебательных систем содержит источник 1 постоянного напряжения и подключенный 15 К; нему однофазный мост с ключевыми э;пементами 2-5 и шунтирующими диода- Ци 6-9, к выходу которого подсоединена нагрузка - электродинамический
13980632
ности. Выходной сигнал U
блока 12 управления, под вход формирователя 13, и короткого импульса положи отрицательной полярности ти от направления измене ти ЭДС обмотки двигателя ственно выходного сигнал 11, повторяющего полярно на клеммах двигателя лярность управляющего фо импульса и определяет од выходов формирователя, н поступает его сигнал, чт нарушение очередности за чевых элементов моста.
Одновременно с сигнал ния однофазным мостом не
5
5
ности. Выходной сигнал U
., (фиг.2) блока 12 управления, подаваемый на вход формирователя 13, имеет форму короткого импульса положительной или . отрицательной полярности в зависимости от направления изменения полярности ЭДС обмотки двигателя и соответственно выходного сигнала U- датчика 11, повторяющего полярность сигнала на клеммах двигателя (фиг.2). Полярность управляющего формирователем импульса и определяет один из двух выходов формирователя, на который поступает его сигнал, что исключает нарушение очередности замыкания ключевых элементов моста.
Одновременно с сигналами управления однофазным мостом независимо от
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления однообмоточным двигателем колебательного движения | 1988 |
|
SU1601729A2 |
| Устройство для управления асинхронным двухфазным двигателем | 1985 |
|
SU1300621A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1988 |
|
SU1721777A1 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Многофазный импульсный стабилизатор постоянного напряжения | 1979 |
|
SU855639A1 |
| Электропривод | 1985 |
|
SU1314426A1 |
| Электрическая машина с вентильно-механическим коммутатором | 1987 |
|
SU1513570A1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМ МОМЕНТОМ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457610C2 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1295501A1 |
Изобретение относится к электротехнике, в частности к привадам колебательного движения, и может быть ис- пользовано в машиностроении, например в компрессоростроении и насосо- строении. Цель изобретения - повышение КПД путем обеспечения резонансного режима работы привода при изменении нагрузки. Способ заключается в том, что периодически изменяют полярность подключения- источника питания постоянного тока к клеммам двигателя, при этом подключают источник на время Т и затем отключают его, а по окончании переходного процесса снижения тока фиксируют момент изменения полярности сигнала на его клеммах и подключают источник питания к клеммам двигателя в противоположной полярности, после чего указанные операции периодически повторяют, причем длительность Т подключения источника питания к клеммам двигателя выбирают менее . величины 4Т, где TO мни - минимально возможный период собственных колебаний системы; лТ - время neper ходного процесса выключения двигателя. 2 ил. i W
двигатель 10 с датчиком 11 полярности20 полярности выходных импульсов блока напряжения на его клеммах, выход ко- 12 начинается формирование сигналов торого через блок 12 управления, под- обратной связи Uoc калиброванной дли- к|пючен к входу формирователя 13 сиг- н|алов управления, выходы которого соединены с ключевыми элементами 2-5 25 и входом обратной связи блока 12 управления .
Устройство работает следующим образом.
Однофазный мост обеспечивает пре- о бразование постоянного напряжения источника 1 в переменное прямоуголь- н;ое с нулевой ступенью напряжение пи- Т|ан«я электродинамического двигателя 110 путем поочередного замыкания клю- Ч;евьгх элементов 2-5 по сигналам Ug
30
35
тельности (Т ), в течение которой изменения полярности сигнала на клеммах двигателя блоком 12 не фиксируются. Интервал t должен выбираться
из условия „,
1 о ммн „ А ut -2- - Т,
которое исключает влияние переходного процесса выключения двигателя на работу устройства и обеспечивает включение соответствующих ключевых элементов 2-5 моста при крайнем положении подвижной части двигателя.
HJ и (фиг. 2) калиброванной длитель- нЬсти Т, заведомо меньшей половины периода собственных колебаний Т автоколебательной системы возвратно- поступательного движения, с паузой Между ними (аТ + a D). Длительность Т задается таким образом, чтобы до момента изменения направления движения .подвижной части двигателя источник питания был отсоединен от его клемм к переходньй процесс снижения тока (интервал йТ) был закончен.
Поочередное формирование сигналов управления однофазным мостом ( Uj,) начинается по командам блока 12 Е; моменты изменения полярности ЭДС обмотки двигателя. Крайние положения его подвижной части фиксируются по : изменению полярности сигнала на клеммах двигателя при отсутствии питающего его напряжения (нулевая сту- гсень) блоком 12 с помощью выходного сигнала Uo (фиг.2) датчика 11 поляр40
При формировании напряжения питания электродинамического двигателя, например, в интервале от О до Тд/2 (фиг.2), управляющим сигналом U формирователя 13 в течение времени Т открыты ключевые элементы 2 и 5, и источник питания 1 оказывается подклю- чен соответствующей полярностью к клеммам двигателя 10. Под действием j приложенного напряжения Од в обмотке двигателя протекает ток i g (фиг. 2), который, взаимодействуя с магнитным полем возбуждения, создает электромагнитную силу, приводящую в движение подвижную часть двигателя.
В момент времени t,, соответствующий моменту окончания сигнала Uct, ключевые элементы 2 и 5 закрываются. Энергия, запасенная индуктивностью обмотки двигателя, в течение времени ДТ переходного процесса его выключения (до момента t,) рекуперируется в источник 1 питания в виде спадающего тока через шунтирующие дио50
55
0 полярности выходных импульсов блока 12 начинается формирование сигналов обратной связи Uoc калиброванной дли- 5
0
5
тельности (Т ), в течение которой изменения полярности сигнала на клеммах двигателя блоком 12 не фиксируются. Интервал t должен выбираться
из условия „,
1 о ммн „ А ut -2- - Т,
которое исключает влияние переходного процесса выключения двигателя на работу устройства и обеспечивает включение соответствующих ключевых элементов 2-5 моста при крайнем положении подвижной части двигателя.
0
При формировании напряжения питания электродинамического двигателя, например, в интервале от О до Тд/2 (фиг.2), управляющим сигналом U формирователя 13 в течение времени Т открыты ключевые элементы 2 и 5, и источник питания 1 оказывается подклю- чен соответствующей полярностью к клеммам двигателя 10. Под действием j приложенного напряжения Од в обмотке двигателя протекает ток i g (фиг. 2), который, взаимодействуя с магнитным полем возбуждения, создает электромагнитную силу, приводящую в движение подвижную часть двигателя.
В момент времени t,, соответствующий моменту окончания сигнала Uct, ключевые элементы 2 и 5 закрываются. Энергия, запасенная индуктивностью обмотки двигателя, в течение времени ДТ переходного процесса его выключения (до момента t,) рекуперируется в источник 1 питания в виде спадающего тока через шунтирующие дио0
5
ды 7 и 8. Напряжение на клеммах двигателя при этом дважды (в моменты t и t начала и окончания переходного процесса) меняет свою полярность. Сигналы об этом с датчика 11 полярности блоком 12 управления не фиксируются (импульсы и у на фиг.2, показанные пунктирными линиями), поскольку последний блокирован сигналом об- ратной связи tJpc формирователя 13 до момента tj.
В момент времени t ток двигателя спадает до нуля. Поскольку подвижная часть двигателя продолжает движение в магнитном поле возбуждения, на интервале л он работает как генератор полярность ЭДС обмотки которого 1 (фиг.2) повторяется выходным сигнало датчика 11, а момент t ее изменения соответствующий крайнему положению подвижной части двигателя, фиксируется блоком 12.
Под воздействием импульса управления и,( в момент времени t на выхода формирователя 13 появляются сигналы открытия ключевых элементов 3 и 4 и сигнал обратной связи для блока 12. Полярность подключения источника питания к клеммам двигателя оказьшаетс противоположной, и его подвижная часть начинает движение к другому крайнему положению. Последующий про-г цесс формирования напряжения питания электродинамического двигателя в интервале времени от T(j/2 до Тд аналогичен описанному, и далее все процессы в схеме периодически повторяются.
Таким образом, обеспечивается фиксация моментов достижения крайних по- ложений подвижной частью электродинамического двигателя и подключение в эти моменты источника питания к клеммам двигателя с поочередно изменяющейся полярностью.
Предлагаемый способ управления повышает по сравнению с известным ста-
Q
5
5 сить о
Q
5
5
бильность рабочих и энергетических характеристик колебательных систем, поскольку обеспечивает устойчивую работу в резонансном режиме, поддерживая равенство частот питающего напряжения и собственных колебаний системы в широком диапазоне изменений нагрузки, напряжения источника питания и условий окружающей среды. При неизменных величинах напряжения питания двигателя электродинамического компрессора и степени сжатия рабочего тела отклонение частоты питающего напряжения от частрты собственных колебаний системы лишь на 4% приводит к увеличению потребляемой мощности на 80% и снижению производительности агрегата на 30%. Эти потери устраняются при использовании предлагаемого способа.
Отсутствие необходимости в датчиках крайних положений для реализации предлагаемого способа позволяет повы- надежность систем возвратно-поступательного движения, а введение нулевой ступени в форму питающего напряжения улучщает его гармонический состав и характеристики привода.
Формула изобретения
Способ управления -однообмоточным двигателем колебательного движения, включающий периодическое изменение полярности питающего напряжения, о т- л ич ающийс я тем, что, с целью повышения КПД путем обеспечения резонансного режима работы при изменении нагрузки, в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя, после прекращения тока обмотки измеряют ЭДС на обмотке, фиксируют момент изменения ее знака и в этот момент включают питание обмотки напряжением противоположной полярности.
| СПОСОБ УМЕНЬШЕНИЯ ПОДАЧИ ВОЗДУХА ИЗ АТМОСФЕРЫ В РАСШИРИТЕЛЬНУЮ ЕМКОCТЬ НАПОЛНЕННЫХ ИЗОЛЯЦИОННОЙ ЖИДКОСТЬЮ ВЫСОКОВОЛЬТНЫХ УСТАНОВОК И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2009 |
|
RU2490744C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
