Изобретение относится к управлению электрическими машинами, в частности для безредукторного привода поршневых насосов и компрессоров и является усовершенствованием изобретения по авт. св. Ns 1398063.
Цель изобретения - повышение стабильности величины рабочего хода подвижной части двигателя.
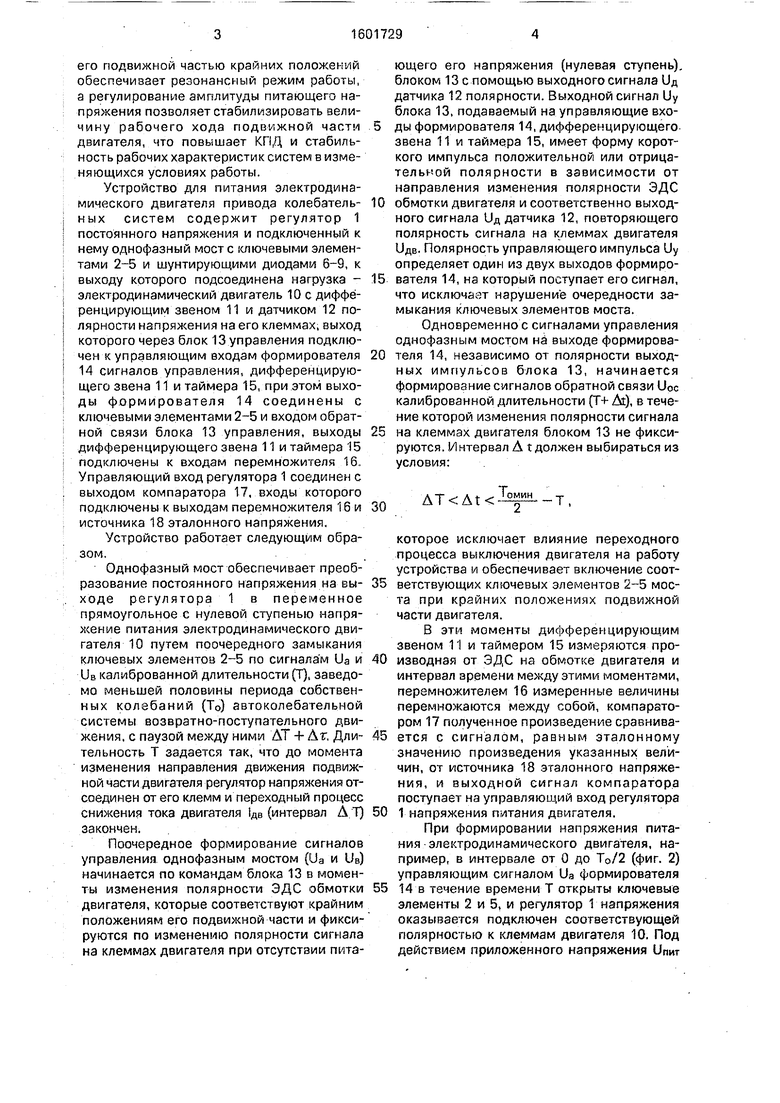
На фиг. 1 приведена блок-схема устройства, реализующего способ,- на фиг. 2 - временные диаграммы.
Способ управления однообмоточным двигателем колебательного движения за- ключается в том, что периодически изменяют полярность питающего напряжения, при этом в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя, после прекращения тока обмотки измеряют ЭДС на обмотке, фиксируют момент изменения ее знака и в. этот момент включают питание обмотки напряжением противоположной полярности, измеряют производную от ЭДС на обмотке двигателя и интервал времени между этими моментами, перемножают измеренные величины между собой, формируют сигнал, равный эталонному значению произведения указанных величин, сравнивают полученное произведение с эталонным и поддерживают их равенство путем регулирования амплитуды питающего напряжения. Переключение полярности напряжения питания двигателя в моменты достижения
его подвижной частью крайних положений обеспечивает резонансный режим работы, а регулирование амплитуды питающего напряжения позволяет стабилизировать величину рабочего хода подвижной части двигателя, что повышает КПД и стабильность рабочих характеристик систем в изменяющихся условиях работы.
Устройство для питания электродинамического двигателя привода колебательных систем содержит регулятор 1 постоянного напряжения и подключенный к нему однофазный мост с 1слючевыми элементами 2-5 и шунтирующими диодами 6-9, к выходу которого подсоединена нагрузка - электродинамический двигатель 10 с дифференцирующим звеном 11 и датчиком 12 полярности напряжения на его клеммах, выход которого через блок 13 управления подключен к управляющим входам формирователя 14 сигналов управления, дифференцирующего звена 11 и таймера 15, при этом выходы формирователя 14 соединены с ключевыми элементами 2-5 и входом обратной связи блока 13 управления, выходы дифференцирующего звена 11 и таймера 15 подключены к входам перемножителя 16., Управляющий вход регулятора 1 соединен с выходом компаратора 17, входы которого подключены к выходам перемножителя 16 и источника 18 эталонного напряжения.
Устройство работает следующим образом.
Однофазный мост обеспечивает преобразование постоянного напряжения на выходе регулятора 1 в переменное прямоугольное с нулевой ступенью напряжение питания электродинамического двигателя 10 путем поочередного замыкания ключевых элементов 2-5 по сигнала м Ua и UB калиброванной длительности (Т), заведомо меньшей половины периода собственных колебаний (То) автоколебательной системы возвратно-поступательного движения, с паузой между ними AT + Дг, Длительность Т задается так, что до момента изменения направления движения подвижной части двигателя регулятор напряжения отсоединен от его клемм и переходный процесс снижения тока двигателя 1дв (интервал Л Т) закончен.
Поочередное формирование сигналов управления однофазным мостом (Ua и UB) начинается по командам блока 13 в моменты изменения полярности ЭДС обмотки двигателя, которые соответствуют крайним положениям его подвижной части и фиксируются по изменению полярности сигнала на клеммах двигателя при отсутствии питающего его напряжения (нулевая ступень), блоком 13 с помощью выходного сигнала Уд датчика 12 полярности. Выходной сигнал Uy блока 13, подаваемый на управляющие входы формирователя 14, дифференцирующего звена 11 и таймера 15, имеет форму короткого импульса положительной или отрицательной полярности в зависимости от направления изменения полярности ЭДС
обмотки двигателя и соответственно выходного сигнала Уд датчика 12, повторяющего полярность сигнала на клеммах двигателя Удв. Полярность управляющего импульса Uy определяет один из двух выходов формирователя 14, на который поступает его сигнал, что исключает нарушение очередности замыкания ключевых элементов моста.
Одновременно с сигналами управления однофазным мостом ни выходе формирователя 14, независимо от полярности выходных импульсов блока 13, начинается формирование сигналов обратной связи Uoc калиброванной длительности (Т+ Ас), в течение которой изменения полярности сигнала
на клеммах двигателя блоком 13 не фиксируются. Интервал А t должен выбираться из условия:
30
-Т
которое исключает влияние переходного процесса выключения двигателя на работу устройства и обеспечивает включение соответствующих ключевых элементов 2-5 моста при крайних положениях подвижной части двигателя.
В эти моменты дифференцирующим звеном 11 и таймером 15 измеряются производная от ЭДС на обмотке двигателя и интервал времени между этими моментами, перемножителем 16 измеренные величины перемножаются между собой, компаратором 17 полученное произведение сравнивается с сигналом, равным эталонному значению произведения указанных величин, от источника 18 эталонного напряжения, и выходной сигнал компаратора поступает на управляющий вход регулятора
1 напряжения питания двигателя.
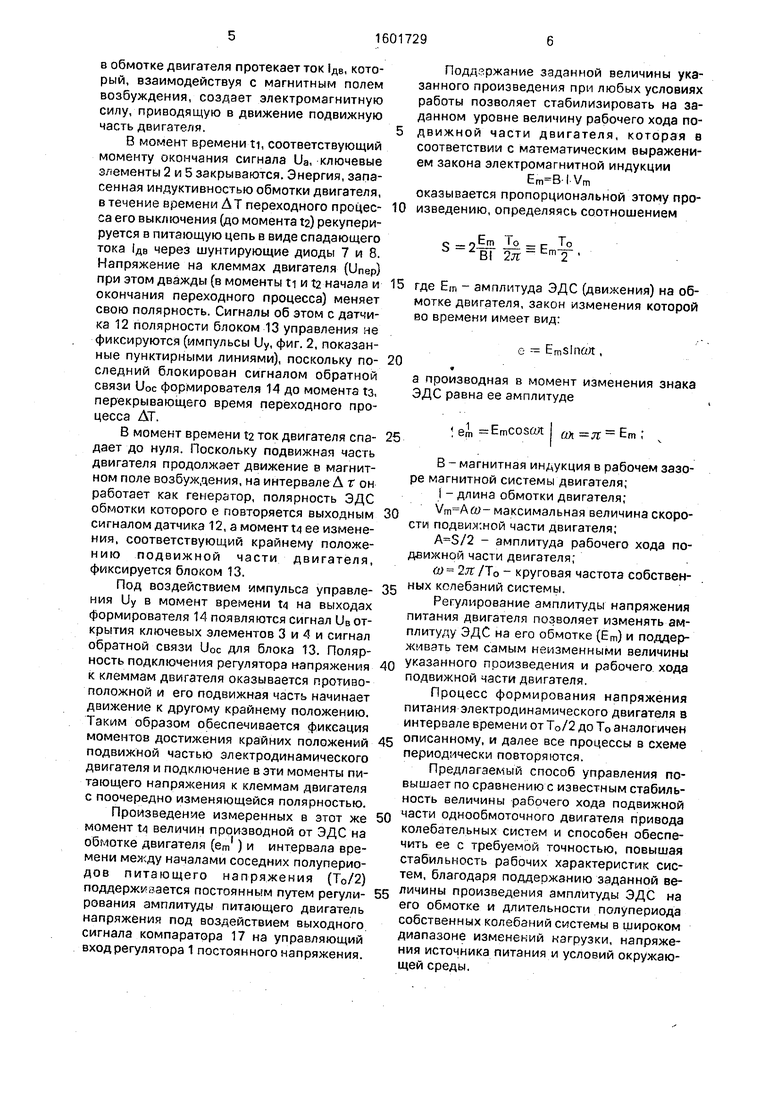
При формировании напряжения питания электродинамического двигателя, например, в интервале от О до То/2 (фиг. 2) управляющим сигналом Ua формирователя
14 в течение времени Т открыты ключевые элементы 2 и 5, и регулятор 1 напряжения оказывается подключен соответствующей полярностью к клеммам двигателя 10. Под действием приложенного напряжения Упит
в обмотке двигателя протекает ток 1д8, который, взаимодействуя с магнитным полем возбуждения, создает электромагнитную силу, приводящую в движение подвижную часть двигателя.
В момент времени ti, соответствующий моменту окончания сигнала Ua, ключевые элементы 2 и 5 закрываются. Энергия, запасенная индуктивностью обмотки двигателя, в течение времени АТ переходного процесса его выключения (до момента ta) рекуперируется в питающую цепь в виде спадающего тока 1дв через шунтирующие диоды 7 и 8. Напряжение на клеммах двигателя (Unep) при этом дважды (в моменты ti и t2 начала и окончания переходного процесса) меняет свою полярность. Сигналы об этом с датчика 12 полярности блоком 13 управления не фиксируются (импульсы Uy, фиг. 2, показанные пунктирными линиями), поскольку последний блокирован сигналом обратной связи Uoc формирователя 14 до момента гз, перекрывающего время переходного процесса АТ.
В момент времени t2 ток двигателя спадает до нуля. Поскольку подвижная часть двигателя продолжает движение в магнитном поле возбуждения, на интервале А г он работает как генератор, полярность ЭДС обмотки которого е повторяется выходным сигналом датчика 12, а момент t4 ее изменения, соответствующий крайнему положению подвижной части двигателя фиксируется блоком 13.
Под воздействием импульса управления Uy в момент времени t4 на выходах формирователя 14 появляются сигнал UB открытия ключевых элементов 3 и 4 и сигнал обратной связи Uoc для блока 13. Полярность подключения регулятора напряжения к клеммам двигателя оказывается противоположной и его подвижная часть начинает движение к другому крайнему положению. Таким образом обеспечивается фиксация моментов достижения крайних положений подвижной частью электродинамического двигателя и подключение в эти моменты питающего напряжения к клеммам двигателя с поочередно изменяющейся полярностью. Произведение измеренных в этот же момент t4 величин производной от ЭДС на обмотке двигателя (em ) и интервала времени между началами соседних полупериодов питающего напряжения (То/2) поддерж /зается постоянным путем регулирования амплитуды питающего двигатель напряжения под воздействием выходного сигнала компаратора 17 на управляющий вход регулятора 1 постоянного напряжения.
Поддержание заданной величины указанного произведения при любых условиях работы позволяет стабилизировать на заданном уровне величину рабочего хода по- движной части двигателя, которая в соответствии с математическим выражением закона электромагнитной индукции
.Vm
оказывается пропорциональной этому про- изведению, определяясь соотношением
с - о Em I о . TO
В
где Еш - амплитуда ЭДС (движения) на обмотке двигателя, закон изменения которой во времени имеет вид:
е EmSlnurt,
9
а производная в момент изменения знака ЭДС равна ее амплитуде
25 ei EmCosGrt | ал л:
Е
;т
В - магнитная индукция в рабочем зазоре магнитной системы двигателя; i - длина обмотки двигателя;
30 (y-максимальная величина скорости подвих .ной части двигателя;
S/2 - амплитуда рабочего хода подвижной части двигателя;
ш 2л: /То - круговая частота собствен- 35 нь1х колебаний системь.
Регулирование амплитуды напряжения питания двигателя позволяет изменять амплитуду ЭДС на его обмотке (Em) и поддерживать тем самым неизменными величины 40 указанного произведения и рабочего хода подвижной части двигателя.
Процесс формирования напряжения питания электродинамического двигателя в интервале времени от То/2 до То аналогичен 45 описанному, и далее все процессы в схеме периодически повторяются.
Предлагаемый способ управления повышает по сравнению с известным стабильность величины рабочего хода подвижной 0 части однообмоточного двигателя привода колебательных систем и способен обеспечить ее с требуемой точностью, повышая стабильность рабочих характеристик систем, благодаря поддержанию заданной ве- 5 личины произведения амплитуды ЭДС на его обмотке и длительности полупериода
собственных колебаний системы в широком диапазоне изменений нагрузки, напряжения источника питания и условий окружающей среды.
Формула изобретения
Способ управления однообмоточным двигателем колебательного движения по авт. св. № 1398063, отличающий с-я тем, что, с целью повышения стабильности величины рабочего хода подвижной части двигателя, измеряют производную от ЭДС
на обмотке двигателя в моменты изменения знака ЭДС и интервал времени между этими моментами, перемножают измеренные величины между собой, сравнивают полученное произведение с его эталонным значением и поддерживают их равенство путем регулирования амплитуды питающего напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления однообмоточным двигателем колебательного движения | 1986 |
|
SU1398063A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Многофазный импульсный стабилизатор постоянного напряжения | 1979 |
|
SU855639A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2246172C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМ МОМЕНТОМ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457610C2 |
| Дистанционное переключающее устройство | 1989 |
|
SU1725381A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ КЛАССА СИЛОВЫХ ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 2022 |
|
RU2787974C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1995 |
|
RU2101827C1 |
| Устройство для управления вентильным преобразователем | 1983 |
|
SU1094129A1 |

Изобретение относится к электротехнике, в частности к управлению электрическими машинами и может быть использовано при создании приводов компрессоров и насосов. Цель изобретения - повышение стабильности величины рабочего хода подвижной части двигателя. Способ управления однообмоточным двигателем колебательного движения заключается в том, что периодически изменяют полярность питающего напряжения. При этом в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя, после прекращения тока обмотки измеряют ЭДС на обмотке, фиксируют момент изменения ее знака и в этот момент включают питание обмотки напряжением противоположной полярности, затем измеряют производную от ЭДС на обмотке двигателя и интервал времени между этими моментами, перемножают измеренные величины между собой, сравнивают полученное произведение с его эталонным значением и поддерживают их равенство путем регулирования амплитуды питающего напряжения. 2 ил.
| Авторское свидетельство СССР N21398063 | |||
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
