Известны устройства для динамических испытаний сооружений, наиример. зданий в натуральную величину. Известные устройства включают возбудитель колебаний в виде кривошипно -шатунного механизма с изменяемым радиусом вращения концов шатуна, установленный на отдельном фундаменте.
Недостатком известных устройств является то, что ири 1сиытанин с их помощью сооружений нельзя в широких пределах менять режим динамического воздействия передаваемого на испытуемое сооружение.
Устройство, выполненное согласно изобретению, лишено этого недостатка. Сущность изобретения заключается в том. что передача возмущающих усилий или моментов испытуе.мому сооружению осуществляется посредством тяг. В тяги включены сменные упругие элементы, например пружины.
Кроме того, в предложенном устройстве обеспечено поддержание стабильности частотного режима динамического воздействия при малых числах оборотов кривошипно-шатунного механизма за счет присоединения к кривошипно-щатунному механизму, например перпендикулярно к основным тягам, дополнительных упругих тяг. Дополнительные тяги заанкерены в станине устройства.
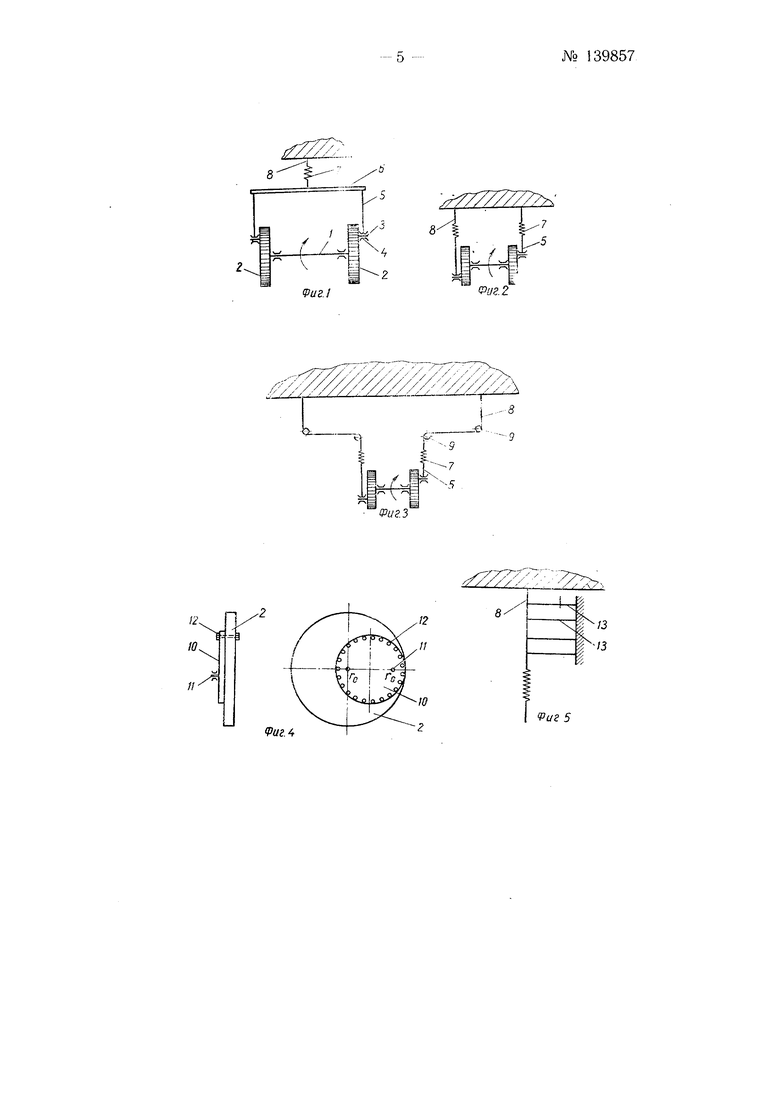
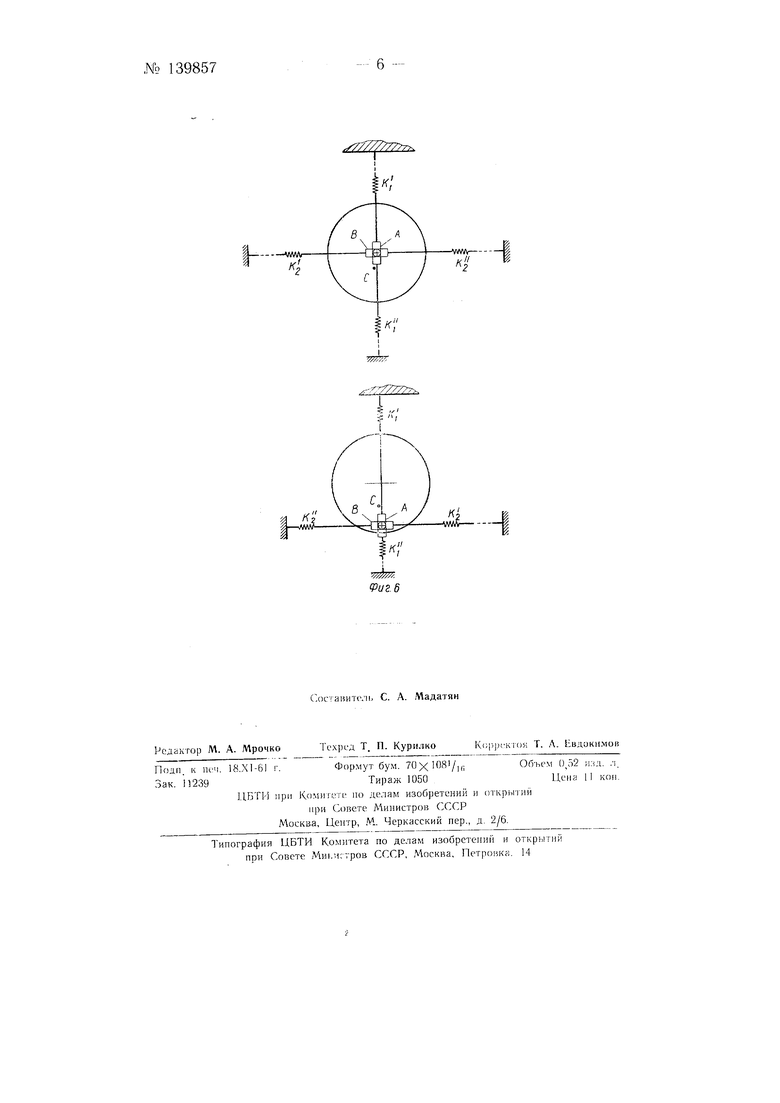
На фиг. 1 изображена схема предложенного устройства; на фиг. 2то же, при передаче на испытываемое сооружение возмущающего момента (пары сил); на фиг. 3 - схема увеличения плеча пары; на фиг. 4 - схема регулирования эксцентрицитета; на фиг. 5 - схема устранения поперечных колебаний тяг; на фиг. 6 - схема постановки дополнительных упругих тяг.
При натурных динамических испытаниях строительных конструкций весьма важно установить частоты собственных колебаний зданий, массивных фундаментов под машины с динамическими нагрузками, высотных сооружений, виброизолированных фундаментов и т. п.
№ 1398572
Наиболее четко частоты собственных колебаний выявляются путем воздействия на сооружение гармонической возмущающей силы с медленно изменяющейся частотой колебаний.
Чаще всего для этой цели ирименяются вибраторы направлениого действия, представляющие собою два параллельных вала с неуравновешенными грузами, вращающимися в противоположных друг к дру1-у направлениях.
Предлагаемое устройство представляет собою вал 1 с двумя дисками 2, эксцентричные пальцы 3, с обойма,ш 4, имеющими подщипники. Обоймы соединены гибкими тягами 5 е жесткой планкой 6. К жесткой планке присоединена одним концом пружина 7, а другой конец пружины соединен с гибкой тягой 8, которая прикрепляется к элементу испытываемой конструкции. При вращении дисков на иснытываемую конструкцию будет передаваться гармоническая возмуп1аклцая сила.
/ Р„ Sin (.)/ гК Si:i ,0/.
где г--эксцентрицитет пальца;
К - жесткость пружины;,
(О --- круговая частота возмуи1ающей силы {угловая скорость вращения дисков).
Амплптуду возмущающей силы Po iK. можно варьировать в широких иределах путем изменепия эксцентрицитета г и жесткости пружины К.
В тех случаях, когда на исследуемую конструкцию требуется передавать возмущающий момент (пару сил), устройство работает по схеме, изображенной iia фиг. 2.
В этом случае палец на втором диске должен находиться по отпощению к пальцу первого диска на другой стороне от оси вала.
Гибкие тяги 5, соединенные последовательно с пружинами 7 и тягами 8, присоединяются к двум точкам испытываемой конструкции.
Для увеличеиия плеча пары сил можно применить блоки 9.
Предлагаемый возбудитель найдет примепен-ие главным образом при возбуждении низких частот колебаний (примерно от О до 10 гц). Вращение вала может осуществляться или вручную через зубчатую (МОЖНО ременную) передачу, или от мотора через редуктор с плазпой регулировкой.
В большинстве равномерное и л.едленное изменение частоты БОЗмуидающей силы может быть получено путем медлеппой оетановки вращающихся дисков, имеюьцнх большой момент инерции. Для этого диски доводятся до некоторого наперед заданного числа оборотов с помощью мотора или вручную, а затем возбудитель медленно останавливается, вызывая максимальные амплитуды колебаний испьггываемой конструкции при совиаде 1ии частоты вынужденных колебаний е одной из частот ее собственных колебаний.
При современной высокочувствительной виброизмерительпой аппаратуре предлагаемый возбудитель может быть иенользован не только для исследования высотных сооружений, но и для исиытапия многоэтажных зданий, если применить достаточно больщие диски.
Для регулирования величины эксцентрицитета можно применять устройство, изобралсенпое па фиг. 4.
На основных дисках 2 укрепляютея негюдвижиые пальцы 3 с эксцептрпиптетом го. На этот палец надевается вспомогательный диск /О с центральным отверстием и подвижным пальцем //, имеющим также эксцентрицитет го, по отпощению к оси вспомогательного диска.
На вспомогательном диске имеются отверстия 12, расположенные по окружности. Такие же отверстия с резьбой имеются и на основном диске. Поворотом вспомогательного диска можно изменять эксцентрицитет пальца // по отношению к оси вращения основных дисков в пределах от О до 2гй.
Для устранения поперечных колебаний самых тяг 8 (при совпадении частоты их собственных колебаний с частотой возмущающей силы) следует применять прикрепленные к ним по длине дополнительные упругие тяги 13, дающие возможность перемещаться основной гибкой тяге вдоль ее направления и препятствующие поперечному отклонению ее в одну сторону в точке крепления тяг 13.
При низкой частоте возмущающей силы, т. е. при малом числе оборотов дисков в минуту, кинетическая энергия их мала и переход части ее в потенциальную энергию деформированной пружины может вызвать неравномерную скорость вращения дисков.
Для устранения неравномерности вращения при низщих частотах возбуждаемых колебаний следует применить систему дополнительных пружин, т. е. помимо основной пружины с л ;есткостью Kt ставится пружина Обе пружины тягами присоединены к обойме, причем пружина растянута на величину, превосходящую эксцентрицитет пальца г. Отверстие в обойме после натял ения пружин должно находиться на оси вращения маховиков. Две другие вспомогательные пружины /Сг и Лз присоединены к обойме В. Отверстие обоймы В при натяжении пружин регулировкой длины тяг должно находиться также на оси вращения маховиков.
После регулировки положения отверстий в обоймах и натяжения пружин обоймы А и В надеваются на палец С. При перемещении обоймы А на расстояние г в пружинах К; и Al будет накоплена дополнительная потенциальная энергия
W . Г(к Если сообщить маховику угловую скорость вращения w, то дальнейщее вращение (пренебрегая трением в подщипниках и гистерезисом в пружинах) будет происходить с этой угловой скоростью равномерно.
Действительно, если принять за начальное положение маховиков в момент времени положение, изображенное на фиг. 6, то перемещения обоймы А будут происходить по закону cos cot а перемещения обоймы В - по закону «2 г Sin юг .
Соответственно количество () потенциальных энергий ,ь Wnr накопленных вертикальными и горизонтальными пружинами (имея в виду их расположение на чертеже) при отклонении от положения равновесия будет равно
, a(K, + .-K
nhT nr -2
При fl, 02 И Л /Ci -- Л2 - Л
Г„, Г„, (cos2 О/ + Sin2 „)П : Кг2--.-const
Таким образом, прт работе возбудителя (без учета потерь на трение и на гистерезис) не будет происходить перехода кинетической энергии в
- 3 -№ 139857
№ 139857- 4 потенциальную и обратно. Будет лишь периодический nepexo;i потенциальной энергии из одной пары пружин в другую. Следовательно вращение маховиков будет происходить с равномерной угловой скоростью. В результате потери энергии иа трение в подшипниках и па гистерезис в пружинах кинетическая энергия маховиков будет уменьшаться и при достаточном моменте инерции маховиков угловая скорость их медленно и равномерно будет убывать.
Строго говоря, потери энергии на трение и lia гистерезис будут иметь периодическую зависимость от времени, но всо едствие того, что эти потери за цикл весьма малы по отношению к общему количеству кинетической энергии маховиков, практически вполне можно считать их вращение равномерно замедленным.
Следует отметить, что пружины Ki и /С не обязательно располагать перпендикулярно по отношению к пружинам Kz и Kz. Важно лишь, чтобы деформации одной пары пружин отставали по фазе от деформации второй пары пружин на 90°.
Предмет изобретения
1.Устройство для динамических испытаний сооружений, например, зданий, в натуральную величину, включающее установленный на отдельном фундаменте возбудитель колебаний в виде кривошипно-шатунного механизма с изменяемым радиусом вращения концов шатунов, отличающееся тем, что, с целью изменения режима динамического воздействия в широких пределах передача возмундающих уси.лий или моментов сооружению осуществлена посредством гибких тяг, включающих сменные упругие элементы, например пружины.
2.Устройство но пункту 1, отличающееся тем, что, с целью поддержания стабильности частотного режима динамического воздействия при малых числах оборотов кривощипно-шатунного механизма к последнему присоединены, например перпендикулярно основным рабочим тягам, дополнительные упругие тяги, заанкеренные в станине уст ройства.
-,/77777777
/ I
.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический гаситель механических колебаний | 1960 |
|
SU138083A1 |
| Изолированный фундамент | 1960 |
|
SU138730A1 |
| Способ автоматической компенсации случайных перемещений виброизолированных фундаментов, например, приборов высокой точности | 1960 |
|
SU134412A1 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| Вибратор для динамических испытаний | 1958 |
|
SU127167A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТ ДЛЯ ПОГРУЖЕНИЯ СВАЙ | 2007 |
|
RU2347037C2 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| ВИБРОСТЕНД | 1967 |
|
SU223413A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| СПОСОБ СОЗДАНИЯ СИЛОВЫХ ИМПУЛЬСОВ И УДАРНЫЙ ИНВЕРСИОННЫЙ ДЕЗАКСИАЛЬНЫЙ МЕХАНИЗМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2407900C2 |
12
1 10
Раг.4
сриг.З
8/
Г г-«
Риг 5
WTTTT:.
Vfjl1
