fn
ty-jTT 7
li V М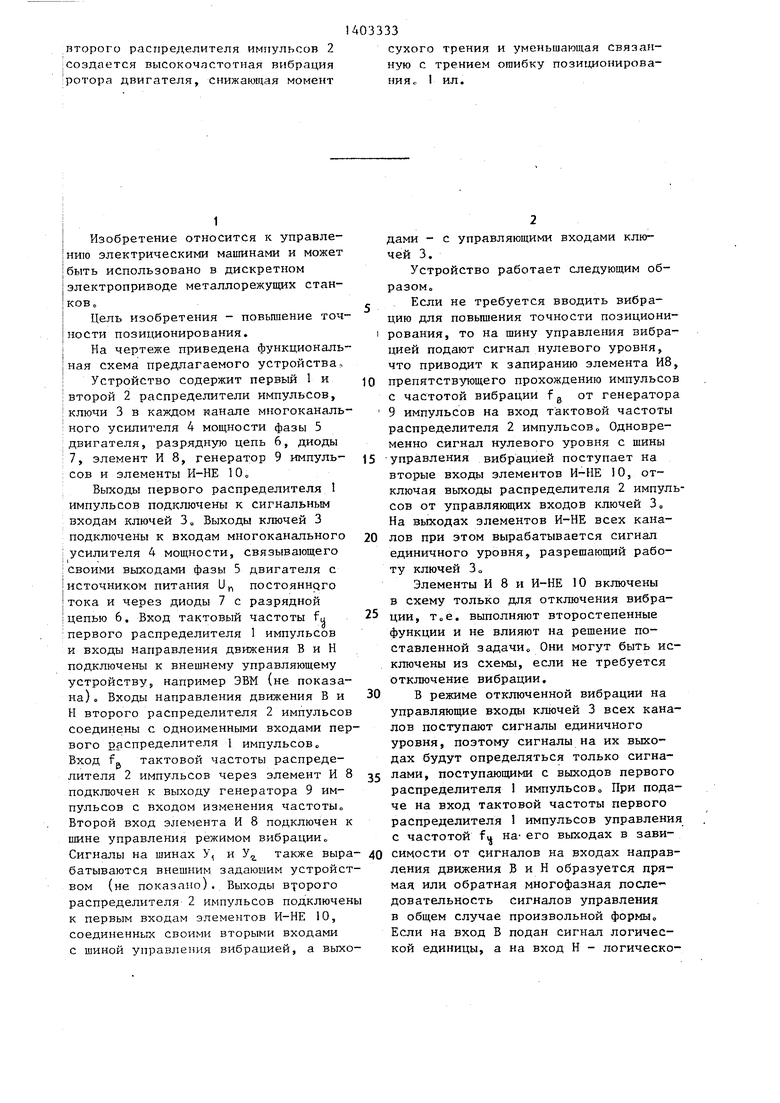

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1985 |
|
SU1309251A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1534741A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1599967A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1658367A1 |
| КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2103716C1 |
| Устройство для управления многофазным шаговым двигателем | 1981 |
|
SU983965A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1646036A2 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для управления шаговым электродвигателем | 1977 |
|
SU736333A1 |
Изобретение относится к области электротехники и может быть ислоль- зовано в дискретном электроприводе металлорежущих станков. Цель изобретения состоит в повышении точности позиционирования. Устройство управления шаговым двигателем содержит первый распределитель импульсов 1, управляющий последовательностью включения фаз 5 шагового двигателя через ключи 3 и усилители мощности 4, Кроме того, в устройстве имеется второй распределитель импульсов 2, работающий на частоте выше частоты приемистости и соединенный с управляющими входами ключей 3, При работе а & (Л
3f€
со
со со
.второго распределителя импульсов 2 Iсоздается высокочастотная вибрация IpoTopa двигателя, снижающая момент
i1
I Изобретение относится к управле- IHHIO электрическими машинами и может быть использовано в дискретном электроприводе металлорежущих стан- ков„
Цель изобретения - повышение точ- jности позидионирования.
i На чертеже приведена функдиональ- Iная схема предлагаемого устройства, Устройство содержит первый 1 и второй 2 распределители импульсов, ключи 3 в каждом нанале миогоканаль- i ного усилителя 4 мощности фазы 5 :двигателя, разрядную цепь 6, диоды 7, элемент И 8, генератор 9 импуль- ; СОВ и элементы И-НЕ 10„ Выходы первого распределителя 1 импульсов подключены к сигнальным входам ключей 3„ Выходы ключей 3 подключены к входам многоканального i усилителя 4 мощности, связывающего I своими выходами фазы 5 двигателя с jисточником питания U постоянного I тока и через диоды 7 с разрядной {цепью 6, Вход тактовый частоты fu :первого распределителя 1 импульсов и входы направления движения В и Н подключены к внешнему управляющему устройству, например ЭВМ (не показана) . Входы направления движения В и Н второго распределителя 2 импульсов соединены с одноименными входами первого р аспределителя 1 импульсов Вход fg тактовой частоты распределителя 2 импульсов через элемент И 8 подключен к выходу генератора 9 импульсов с входом изменения частоты Второй вход элемента И 8 подключен к шине управления режимом вибрации о Сигналы на шинах У, и У также выра батываются внешним задающим устройством (не показано). Выходы второго распределителя 2 импульсов подключен к первым входам элементов И-НЕ 10, соединенных своими вторыми входами с шиной управления вибрацией, а выхо1403333
сухого трения и уменьшающая связанную с трением огаибку позиционирова ШЯ« I ил.
дами - с управляющими входами ключей 3.
Устройство работает следующим образом
Если не требуется вводить вибрацию для повышения точности позиционирования, то на шину управления вибрацией подают сигнал нулевого уровня, что приводит к запиранию элемента И8 препятствующего прохождению импульсов с частотой вибрации fg от генератора 9 импульсов на вход тактовой частоты распределителя 2 импульсов Одновременно сигнал нулевого уровня с шины управления вибрацией поступает на вторые входы элементов И-НЕ 10, отключая выходы распределителя 2 импульсов от управляющих входов ключей 3 На выходах элементов И-НЕ всех каналов при этом вырабатывается сигнал единичного уровня, разрешающий работу ключей 3 о
Элементы И 8 и И-НЕ 10 включены в схему только для отключения вибрации, . выполняют второстепенные функции и не влияют на решение поставленной задачи Они могут быть исключены из схемы, если не требуется отключение вибрации,
В режиме отключенной вибрации на управляющие входы ключей 3 всех каналов поступают сигналы единичного уровня, поэтому сигналы на их выходах будут определяться только сигналами, поступающими с выходов первого распределителя 1 импульсов При подаче на вход тактовой частоты первого распределителя 1 импульсов управления с частотой fU на- его выходах в зависимости от сигналов на входах направления движения В и Н образуется прямая или обратная многофазная после - довательность сигналов управления в общем случае произвольной формы Если на вход В подан сигнал логической единицы, а на вход Н - логическо Д
го нуля, то сигналы на выходах распределителя 1 импульсов образуют условно принятую прямую многофазную последовательность,, При подаче на вход В сигнала нулевого уровня, а на вход Н - единичного уровня, последовательность выходных сигналов распределителя импульсов изменяется на обратную, Тсе, происходит реверс двигателя
Сигналы с выходов ключей 3 поступают на входы многоканального усилителя 4 мощности, который усиливает их и формирует соответствующие напряжения (или токи) на фазах 5 шагового двигателя Усилитель 4 мощности может работать как в ключевом режиме, так и в режиме формирования заданных фазных напряжений (или токов), что несущественно для решения поставленной задачи. Например, при использовании электрического дробления шага на выходах распределителя формируются сигналы треугольной или близкой к синусоидальной формы, поэтому в общем случае связь между распределителем I импульсов и усилителем 4 мощности должна осуществляться через ключи, а не элементы И Если на выходах распределителя 1 импульсов 1 вырабатываются только дискретные сигналы нулевого и единичного уровней, то в качестве ключей 3 могут быть использованы элементы И.
При запирании каждого ранее включенного канала усилителя 4 мощности электромагнитная энергия, запасенная в возбужденной фазе 5, через диод 7 передается в разрядную цепь 6, что снижает коммутационные перенапряжени на элементах усилителя мощности. Разрядная цепь 6 может быть выполнена в виде резистора, шунтированного конденсатором, стабилитрона, источника напряжения и т«д..
Таким образом, при запорных цепях вибрации устройство обеспечивает нормальную коммутационную фазу шагового двигателя. В этом случае при нагрузке сухого трения отработка одного или группы шагов заканчивается, когда подвижный элемент попадает в зону ограниченнзпо статической ошибкой
0, tare sin |г-.
где H-f- момент сухого трения;
максимальный момент шагового двигателя.
в зависимости от величины отработанного шага и других изменяющихся факторов двигатель может остановиться в
любом, заранее неизвестном положении внутри зоны нечувствительности, определяемой статической ошибкой В , Особенно больших значений статическая ошибка достигает при реверсе двигателя„
Для устранения статической ошибки позиционирования вводится дополнительная высокочастотная коммутация фаз 5 шагового двигателя с частотой. °
При подаче на шину 12-ти сигналов
единичного уровня разрешается прохождение импульсов с выхода генератора 9 на тактовый вход второго распределителя 2 импульсов и сигналов с 5ЬГХОДОВ
последнего через элементы И-НЕ 10 на управляющие входы ключей 3„ В этом случае высокая частота i , поступающая на управляюи1ие входы ключей 3, модулируется основными сигналами управления, поступающими с входов распределителя импульсов В результате в фазах 5 двигателя протекают основные токи и точки пульсации с .частотой fg/n,rAe п - число тактов коммутации распределителей и 2 .импульсов Частоту fg выбирают такой, чтобы вызванные ею пульсации токов не привели бы к движению двигателя, т.е. она должна быть вьпле частоты приемистости. Двигатель, движется со ско- . ростью, определяемой частотой управления 03,, об f и , гдео - шаг двигателя. Пульсации токов с частотой.fg воз буждают дополнительное движение поля
статора с частотой вибрации Og oi-f ц При сложении этих двух полей на ротор шагового двигателя будет действовать знакопеременный момент Wg вибрации, изменяющийся с чистотой
COB-CO,o6(fB-f,j) .
Если знакопеременный момент вибрации MS. вызьшает колебания скорости ротора шагового двигателя с амплиту
ои А
большей, чем максимальная
скорость (dO/dt), определяемая основным движением поля статора, т,ее Ар (d9/dt)|,TO обеспечивается вибрационная линеаризация нелинейного сухого трения,кото рое в этом случае проявляет себя как линейное вязкое трение. Это означает, что в режиме позиционирования (d0/dt 0) момент нагрузки равен нулю и статическая ошибка отсутству- еТо Такими образом, введение дополнительной модуляции токов в фазах, обепечиваемое дополнительным распределителем импульсов и импульсным генертором, позволяет исключить статичес- Kyio ошибку при позиционировании.
Если вибрацию сохранить в режиме стоянки двигателя, то ротор будет совершать высокочастотные колебания, амплитуда которых зависит от пара- метров двигателя и частоты импульсного генератора f„. „ Регулируя fo
6
Например, по тине У,, можно установить требуемые параметры вибрации о При длительной стоянке двигателя и яежелателт: ности высокочастотных ко- (пебаний после окончания переходного процесса вибрация может отключена путем подачи на шину У сигна- |па нулевого уровня Применение новых прогрессивных способов и устройств, обеспечивающих новое качество серий- Но выпускаемому приводу, затруднено- гем, что для этого требуется иногда значительная переработка (переделка) ре только электронных схем, но и конструкции прибора с Применение предлагаемого устройства в серийном приводи свободно от этого недостатка Это объясняется тем, что современный шаговый привод, находящийся р серийном производстве, строится по | одульному принципу. Так устройство управления ОЩ типа БУ-3 комплектует- |:;я модулями усилителя мощности, рас- :(1ределителем импульсов и вспомога
тельными модулями cинxpofшзaции сиг- налов Чтобы снабдить серийный привод новым качеством Тое„ повьпиенной точностью позиционного движения, достаточно доукомплектовать последний вторым модулем распределителя. Эта операция не требует переработок и экономическ;и эффективна
Формула изобретения
Устройство для управления шаговым двигателем, содержащее распределитель импульсов с входами тактовой частоты и направления движения и многоканальный усилитель мощности, каждый канал которого соединяет фазу двигателя с источником питания постоянного тока, отличающееся тем,что,с целью повышения точности позиционирования,введены второй распределитель импульсов, генератор импульсов и ключи по числу фаз двигателя , каждый из которых выходом соединен с входом соответствующего канала усилителя мощности, сигнальным входом - с соответствующим дом первого распределителя, а управляющим входом - с одноименным выходом второго распределителя импульсов, подключенного входом тактовой частоты к выходу генератора импуль-. сов, а входами направления - к соответствующим входам первого распределителя импульсов
| Рубцов ВоПо, Садовский Л„Ао.5 Филатов АоСо Системы с силовыми ша- говыми двигателями для металлургической пpo ft IшлeннocтИa М,.: Энергия, 1.967,с.50 | |||
| Луценко В.Ео, Рубцов В.П„, Элект- ролривод с шаговыми двигателями,- Электропривод и автоматизация промышленных установок,Т„6, М,: ВИНИТИ, 1978, с.82-83 | |||
| . |
