Изобретение относится к области сварки, а именно к автоматизации процесса дуговой сварки.
Целью изобретения является упрощение конструкции и повышение надежности работы устройства.
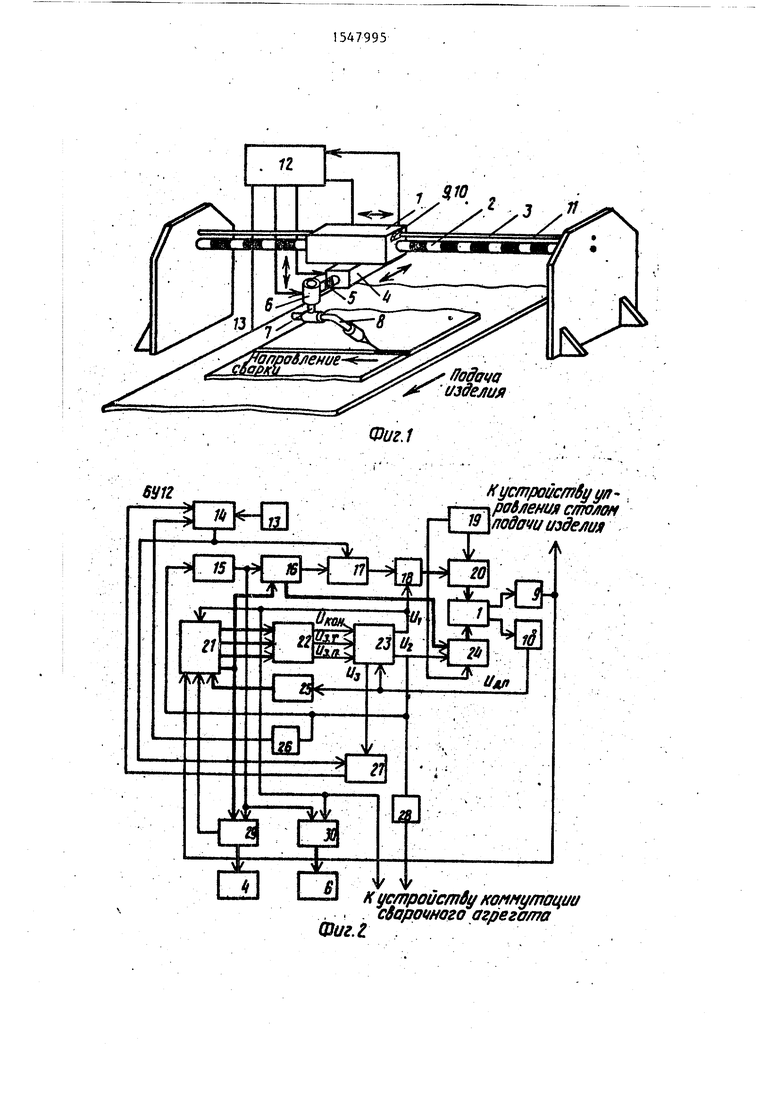
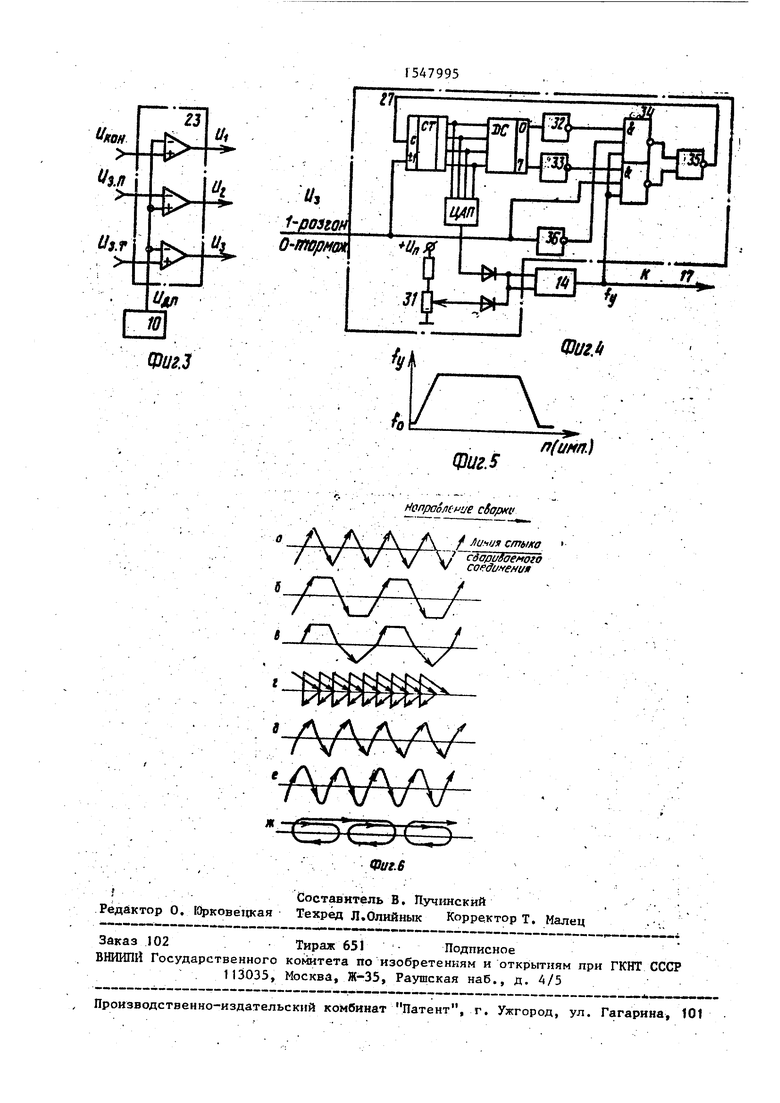
На фиг. 1 приведена функциональная схема устройства для перемещения и колебаний сварочной горелки; на фиг. 2 - функциональная блок-схема системы управления механизмом перемещения и колебаний горелки; на фиг. 3- функциональная схема порогового устройства; на фиг. 4 - функциональная схема устройства коррекции частоты; на фиг. 5 - диаграмма изменения частоты управления импульсов в шаговом режиме работы двигателя продольных перемещений по заданному закону; на фиг. 6 - некоторые виды траекторий перемещения сварочной горелки
Устройство (фиг. 1) содержит мно- госЬазный линейный электромагнитный двигатель 1, переметающийся по закрепленному на концах секционированному якорю 2, состоящему из ферромагнитных и немагнитных элементов и направляющей 3, пцоль стыка свариваемого соединения. К индуктору двигателя 1 прикреплен многофазный линейный электромагнитный двигатель 4 поперечных копебанчй горшки, в расточке
сл
4ь Ч
СО
СП
статора которого размешен с возможностью продольного перемещения секционированный якорь 5, К одному из концов якоря 5 прикреплен однофазный линейный электромагнитный двигатель б вертикального переметения горелки, к концу итока якоря 7 которого жестко прикреплена сварочная горелка 8. Датчик 9 реверса и датчик 10 положения закреплены на индукторе двигателя 1 с возможностью взаимодействия с направляющей 3. Отверстие 11 на направляющей 3 предназначено для выработки сигнала реверса перемещения двигателя 1 в исходном4 положении с помощью датчика 9. Блок 12 управления осуществляет программное управление механизмом переметения и колебаний горелки. Датчик 13 изделия расположен под столом подачи изделия в зоне сварки и предназначен для выработки сигнала о наличии изделия в блок 12 управления.
Блок 12 управления (фиг. 2) содержит генератор 14 тактовых импульсов регулируемой частоты, последовательно соединенные между собой задающий генератор 15 повышенной частоты, четьг- рехканальный цифроаналоговый задат- „ чик 16, схему ИЛИ 17, распределитель 18 импульсов, источник ) питания постоянного тока, усилитель 20 мощности, микропроцессор 21, трехканальный цифроаналоговый эадатчик 22, порого-; вое устройство 23, четырехканал ьный регулятор 24 напряжения, аналого-цифровой преобразователь 25, схему НЕ 26, устройство 27 коррекции частоты, од- новибратор 28, устройство 29 управления поперечными колебаниями горелки и устройство 30 управления вертикаль- ными перемещениями двигателя б (с це- , лью упрощения отдельные связи на фиг. 2 показаныцодной функциональной связью каждая).
Устройство 27 коррекции частоты (фиг. 4) содержит потенциометр 31 ручной регулировки частоты, пять схем 32 36 совпадения, цифроаналоговый преобразователь, реверсивный счетчик, дешифратор, два диода и сопротивление (с целью упрощения связи между блоком 12 управления1, линейными двигателями 1, 4 и 6 и датчиками 9 и 10; на фиг.-l показаны соответственно , каждая одной (Функциональной связью). Устройство работает следующим образом.
0
5
0
5
0
5
0
5
Перед началом работы двигатель 1 находится в исходном положении (справа на фиг. 1) и с помощью микропроцессора 21 через первые три его восьмиразрядных выходных порта устанавливаются в цифровом коде необходимые значения величин конечного напряжения UK(W, зоны Uj,.r торможения и зоны IL „ позиционирования. Эти значения в цифровом параллельном коде поступают на входы второго трехка- нального цифроаналогового задатчика 22, на выходах которого устанавливаются аналоговые значения величин UkoH, U, ти U,,n поступающие на входы поро- рового устройства 23, где сравниваются с величиной напряжения U чт датчика 10 положения индуктбра. В исходном состоянии двигателя 1 значение U о.п минимальное и на выходах устройства 23 устанавливаются следующие величины напряжений: U, и U3 - логическая 1, U4 - логический
Трехканальное устройство 23 устро-- ено следующим образом. Основу каждого канала составляет операционный усилитель или компаратор (фиг. 3), Если величина напряжения на прямом входе каждого амплитудного компаратора превышает величину напряжения на инверсном входе, то на его выходе устанавливается значение высокого уров ня, т.е. логической 1. В противном случае на выходе компаратора устанавливается значение низкого уровня, т.е. логического О. Сигнал логического О с выхода устройства 23 поступает в усилители-формирователи че- тырехканального регулятора 24 напряжения, устанавливая его транзисторы в проводящее состояние, а также блокирует первый задающий генератор 15 повышенной частоты и через схему НЕ 26 разрешает работу второго генератора 14 тактовых импульсов регулируемой частоты. При этом на выходе Uj устройства 23 имеется сигнал логической 1, разрешающий работу устройства 27 коррекции частоты генератора 14, В результате тактовые импульсы от генератора 14 через схему ИЛИ 17 поступают в распределитель 18 импульсов, который осуществляет коммутацию обмоток двигателя 1 в усилителе 20 мощности по заданному алгоритму. В этом случае осуществляется шаговый режим работы двигателя 1 с программным разгоном и торможением.
Устройство 27 коррекции частоты генератора 14 работает следующим образом.I
С помощью потенциометра 31 ручной регулировки частоты устанавливается начальная частота fg генератора 14 коммутации фаз двигателя 1 (фиг. 4). При наличии сигнала логической 1 напряжения 3 от устройства 23 (Разгон) первый импульс от 14 поступает через нижнюю часть схемы 34 совпадения и схему 35 на счетный вход реверсивного счетчика и преобразуется циф- роаналоговым преобразователем в приращение напряжения ли, которое суммируется на входе генератора 14 и вызывает увеличение частоты fy управляющих импульсов на его выходе. Второй- импульс вызывает очередное приращение Ц на выходе ЦАП, и т.д. до восьмого импульса, при появлении которого на седьмом выходе дешифратора появляется огическая 1, блокирующая через схе0
ном регулировании токов п обмотках двигателя . Сигналы повышенной частоты от генератора I5 поступают в первый четырехканальный цифроаналого- вый задатчик 16, а также в устройство
29управления поперечными колебаниями горелки двигателя 4 и устройство
30управления вертикальными переметениями двигателя 6. Аналоговые сигналы с выходов задатчика 16 поступают на входы четырехканального регулятора 24, где и осуществляется четырех- фазное регулирование токов в двигате, ле 1 по заданному закону в режиме искусственного дробления шага двига - теля и плавного переметения подвижного элемента.
Линейный электродвигатель 6 вертикальных перемещений горелки представляет собой однофазную структуру (обмотка и ферромагнитный сердечник) с пружиной. При плавном увеличении тока в его обмотке якорь двигателя за
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Устройство для автоматической сварки неповоротных стыков труб | 1985 |
|
SU1301607A1 |
| Способ управления положением сварочной горелки и устройство для его осуществления | 1987 |
|
SU1544534A1 |
| Способ дуговой сварки плавящимся электродом с короткими замыканиями дугового промежутка и устройство для его осуществления | 1986 |
|
SU1434636A1 |
| Устройство для автоматической сварки неповоротных стыков труб | 1985 |
|
SU1368126A1 |
| Устройство для сварки | 1987 |
|
SU1555078A1 |
| Устройство для регулирования напряжения импульсной дуги | 1983 |
|
SU1098705A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| Устройство для дуговой сварки с колебаниями электрода | 1986 |
|
SU1324792A1 |
| Устройство для автоматического управления процессом сварки | 1985 |
|
SU1430206A1 |
Изобретение относится к сварке, а именно к автоматизации процесса дуговой сварки. Цель изобретения - упрощение конструкции и повышение надежности работы устройства. Устройство содержит механизм перемещения и колебаний горелки, выполненный в виде трех линейных электромагнитных двигателей, источник питания и блок управления приводом перемещения и колебаний горелки. Программа работы устройства задается с помощью микропроцессора. Логический сигнал, реализуемый в блоке управления устройства, дает разрешение на работу двигателей в режиме непрерывного (плавного) перемещения. Сварочная горелка опускается. Включается устройство коммутации сварочного агрегата, и начинается процесс сварки с поперечными и продольными перемещениями горелки по заданной программе. Устройство с микропроцессорной системой управления позволяет упростить механическую часть привода, реализовать различные его динамические состояния с обеспечением программного разгона и торможения, фиксации и реверса в заданных точках рабочего хода. 6 ил.
му 33 поступление импульсов от генера 25 счет сжатия противодействующей пружитора 14 на схему 34. Процесс нарастания частоты управляющих импульсов прекращается и дальнейшая коммутация обмоток двигателя 1 производится с постоянной частотой на заданном расстоянии (количестве шагов). При пот ступлении от устройства 23 сигнала U3 логического О (Торможение) процесс снижения частоты fy управляющих импульсов происходит в обратном порядке. Таким образом осуществляются программные разгон и торможение подвижного элемента двигателя 1 на заданном количестве шагов (Лиг. 5).
В результате двигатель 1 продольного переметения горелки разгоняется до заданной скорости движения до зоны торможения. При подходе к зоне торможения на выходе U3 порогового устройства 23 появляется сигнал логического О и осуществляется торможение двигателя 1 на заданном количестве шагов В этом случае устройство приближается к зоне позиционирования, и, когда величина U ап становится больше величины , на выходе U устройства 23 (фиг. 2) появляется сигнал логической 1, который через схему НЕ 26 блокирует работу генератора 14, разрешает работу задающего генератора 15 режима плавного переметения подвижных элементов двигателей устройства и подключает транзисторы регулятора 24 напряжения в режим ИИМ при четырехфазны начинает плавно перемешаться и сварочная горелка опускается до контакта со свариваемым изделием. При уменьшении тока в обмотке пружина Q распрямляется и сварочная горелка поднимается над изделием после окончания процесса сварки.
Сигнал логической 1 с выхода U порогового устройства 23 дает разрешение на работу двигателей в режиме непрерывного (плавного) перемещения, сварочная горелка опускается, через одновибратор 28 с задержкой включает-f ся устройство коммутации сварочного агрегата и начинается процесс сварки с поперечными и продольными перемещениями горелки по заданной программе. При достижении сварочной горелки конечной точки сварки величина U
0
5
0
5
jn
становится больше заданной величины, UKO(,, на выходе Uf устройства 23 появляется логический О, который пере- ключает распределитель 18 и устройство 30 на реверс, блокирует устройство коммутации сварочного агрегата и поступает в микропроцессор 21. Процесс сварки прекращается, сварочная горелка поднимается, а задатчик 16 и устройство 29 блокируются сигналами с четвертого выходного порта микропроцессора 21. При поступлении сигнала U, уровня логического О в микропро- jцессор 21 на выходах задатчика 22 устанавливаются максимальные значения
715
tL т и Uj.n, на выходе U2 порогового Устройства 23 устанавливается логический О, а на Uj - логическая 1, Генератор 15 блокируется и система Переводится в шаговый режим.. Двигатель 1 начинает возвращаться в исход- Йое положение с программным разгоном До заданной скорости перемещения. Когда величина напряжения становится равной некоторому заданному значению .на обратном ходе двигателя I, через АЦП 25 эта информация поступает в микропроцессор 21 в циФро
том коде, на выходе Uy.T устанавлива- логового ввода. Микропроцессор 21
UT UT U ГТЧ1ПО Quatrou«0 опптпоФ- представляет собой микроконтроллер
йтся минимальное значение, соответ ствующее исходному положению двигателя 1 и осуществляется торможение двигателя продольного перемещения горел-. «и. При достижении двигателем 1 отверН стия 1,1 на направляющей 3 (фиг. 1) срабатывает фотодатчик 9 реверса дви ления (представляющий собой оптопару ijmia светОдиод - фотодиод), сигнал логической 1 от которого поступает и микропроцессор 21 и в устройство управления столом, подачи изделия. На выходе UKOH задатчика 22 устанавливается минимальное значение исход- и(ого состояния двигателя 1 (U KOH Ujci)) 30 , н)а выходе U, устройства 23 опять по- яЬляется сигнал логического О, перебрасывая распределитель 18 на реверс и устанавливая с помощью микропроцессора 2) требуемые для рабочего
20
25
Электроника МС 2702 на основе мик ропроцессорной серии К 580.
Таким образом, с помощью системы программного управления устройством перемещения и колебаний горелки на основе .линейных электромагнитных дви гателей задается необходимый закон движения горелки в-процессе сварки. Некоторые виды траектории движения сварочной горелки, которые можно получить с помощью предлагаемого устройства, показаны на фиг. 6. Скорост перемещения и колебаний горелки уста навливается и регулируется с помощью генераторов 14 и 15 в шаговом и непрерывном режимах движений.
Устройство с микропроцессорной сг стемой управления позволяет значительно упростить механическую часть
40
45
Процесса сварки первоначальные значе- 35 привода, реализовать различные его Ция икОН, UЈ.T и Uj,n на выходах за- д|атчика 22. Стол подачи перемешает в э то время готовое изделие (фиг. 1), qpa6aTbffiaeT датчик 13 наличия изделия, например, контактного типа, блокирует генератор 14, и устройство в исходном состоянии готово к даль- н ейшей работе. При подаче нового изделия датчик 13 разрешает работу ге- йератора 14 и устройство начинает ф ункционйровать по описанному алгоритму.
.Текущая информация о положений | двигателя 5 и, соответственно, сва- рЮчной горелки поступает от датчика 10 через АЦП 25 в микропроцессор 21, позволяет управлять работой задатчика 16 по заданной программе. Информация об отработке заданного количества шйгов двигателем 4 попереч ных колебаний горелки также поступает в цифровом виде в микропроцессор Устройства 29. Датчик 10 положения
50
55
динамические состояния с. обеспечением программного разгона и торможени фиксации и реверса в заданных точках рабочего хода. Кроме того, упрощается конструкция и повышается надежность, обеспечиваются гибкость в управлении,, быстродействие, простота обслуживания, снижаются стоимость и массогабаритные показатели, шумност повышается безопасность и уменьшается загрязнение окружающей среды.
Устройство может использоваться для автоматизации процессов дуговой сварки изделий, для электроилаковой сварки, автоматической наплавки, окраски изделий и других задач автома- тизаций производственных процессов.
Формула изобретения
Устройство для перемещения и коле баний сварочной горелки, содержащее первый многоЛаэный линейный электро8
индуктора двигателя представляет собой многооборотный потенциометр типа 1Ш или ШИШ, на оси которого имеется колесо, находящееся в контакте с направляющей 3 (фиг, 1). Значение напряжения проградуировано в соответствии с перемещением двигателя 1 по всей длине рабочего хода. А1Щ 25 (фиг. 2) предстазляет собой стандартный быстродействующий аналого-цифровой преобразователь типа К1107ПВ1, широко использующийся в микроэлектродной технике в составе блоков анапредставляет собой микроконтроллер
30
0
5
Электроника МС 2702 на основе микропроцессорной серии К 580.
Таким образом, с помощью системы программного управления устройством перемещения и колебаний горелки на основе .линейных электромагнитных двигателей задается необходимый закон движения горелки в-процессе сварки. Некоторые виды траектории движения сварочной горелки, которые можно получить с помощью предлагаемого устройства, показаны на фиг. 6. Скорость перемещения и колебаний горелки устанавливается и регулируется с помощью генераторов 14 и 15 в шаговом и непрерывном режимах движений.
Устройство с микропроцессорной сгт стемой управления позволяет значительно упростить механическую часть
35 привода, реализовать различные его
40
45
35 привода, реализовать различные его |50
55
динамические состояния с. обеспечением программного разгона и торможения, фиксации и реверса в заданных точках рабочего хода. Кроме того, упрощается конструкция и повышается надежность, обеспечиваются гибкость в управлении,, быстродействие, простота обслуживания, снижаются стоимость и массогабаритные показатели, шумность, повышается безопасность и уменьшается загрязнение окружающей среды.
Устройство может использоваться для автоматизации процессов дуговой сварки изделий, для электроилаковой сварки, автоматической наплавки, окраски изделий и других задач автома- тизаций производственных процессов.
Формула изобретения
Устройство для перемещения и колебаний сварочной горелки, содержащее первый многоЛаэный линейный электродвигатель поперечных колебаний горелки и блок управления, состоящий из генератора импульсов повышенной частоты, подключенного своим выходом к первому входу четырехканального циф- роаналогового задатчика, аналоговые выходы которого подключены к первым входам четырехканального регулятора напряжения, распределителя импульсов, подсоединенного к управляющим входам многоканального усилителя мощности, устройства управления поперечными колебаниями горелки, к выходам которого подключены обмотки первого многофазного электродвигателя, источник питания постоянного тока, подсоединенный своими шинами к регулятору напряжения и усилителю мощности, устройство коммутации сварочного тока, отличаюше еся тем, что, с целью упрощения конструкции и повышения надежности, оно снабжено вторым многофазным линейным электродвигателем продольного перемещения горелки с направляющей для его индуктора и однофазным линейным электродвигателем вертикального перемещений горелки, датчиком наличия изделия, вторым генератором тактовых импульсов регулируемой частоты, вторым трехканаль- ным цифроаналоговым задатчиком, ана- логово-циЛровым преобразователем, . микропроцессором, пороговым устройством, устройством коррекции частоты, одновйбратором, схемами ИЛИ, НЕ, устройством управления вертикальными перемещениями горелки) при этом якорь второго многофазного электродвигателя жестко связан с направляющей для перемещения индуктора, на одной из боковых стенок индуктора жестко смонтированы датчик его положения и датчик реверса движения, а на нижней стенке индуктора жестко установлен статор второго многофазного линейного электродвигателя, к одному из концов яко- ря которого прикреплен однофазный линейный электродвигатель, к якорю которого жестко закреплена горелка выход второго генератора соединен с одним из входов схемы ИЛИ и входом устройства коррекции частоты, а щыход первого генератора подключен к первому входу устройства управления попеД7995
10
10
20
25
30
35
40
45
50
речными колебаниями и к входу устройства управления вертикальными перемер щениями, цифровой выход первого циф- роаналогового задатчика подсоединен к второму входу схемы ИЛИ, а выход схемы ИЛИ подсоединен к первому входу распределителя импульсов, к второму входу которого подключены первый выход порогового устройства, первый вход микропроцессора, второй вход -. устройства управления вертикальными перемещениями и первый вход устройства коммутации сварочного агрегата, обмотки второго многоЛазного лииёй- ного электродвигателя подключены между выходами усилителя мощности и регулятора напряжения, второй вход которого соединен с вторым выходом порогового устройства, входом первого генератора, через схему. НЕ с первым входом второго генератора и через од- новибратор с вторым входом устройства коммутации сварочного агрегата, а третий выход порогового устройства через устройство коррекции частоты, подключен к второму входу второго генератора, к третьему входу которого подключен датчик наличия изделия, выход датчика реверса индуктора подсоединен к второму входу микропроцессора и к устройству управления столом подачи изделия, а выход датчика положения индуктора подключен к одному входу порогового устррйства и к входу аналого-цифрового преобразователя, выходы которого подключены к третьим входам микропроцессора, четвертый вход которого соединен с вторым выходом устройства управления поперечными колебаниями, три выходных порта микропроцессора подключены к входам второго трехканального цийроаналого - вого задатчика, выходы которого соединены с вторыми входами порогового устройства, четвертый выходной порт микропроцессора-подключен к вторым входам первого цифроаналогового задатчика и к вторым входам устройства управления поперечными колебаниями, а к выходам устройства управления вертикальными перемещениями подключена обмотка однофазного линейного электродвигателя .
u-l ОЧ СЛ Г-.
JЮ
I
Фиг.З
/ A J А / Личия стыка
v VVV
/
7V7 / / V/ свариваемого / V V V V сочинения
, Г ,, /
л/ /
АЛЛ/ V АЛЛА/
И
to
Фиг
v
фиг.5
п(инп.}
rionpaoflcwe сборке
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
