Од
со
4
u
Q)l/.f
Изобретение относится к горной промьшшенности, в частности к проти- вовыбросовому оборудованию, предназначенному для герметизации устья скважины при бурении на суше или на море.
Цель изобретения - повышение надежности контроля конечных положений плашки при одновременном упрощении конструкции превентора.
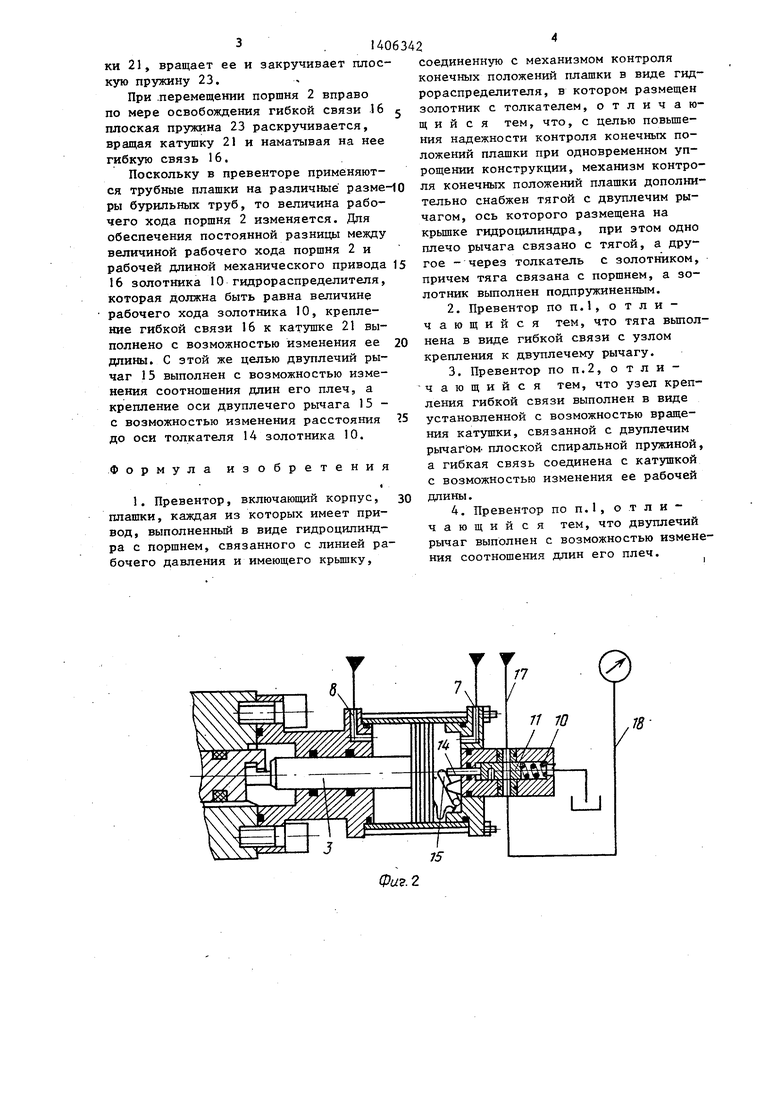
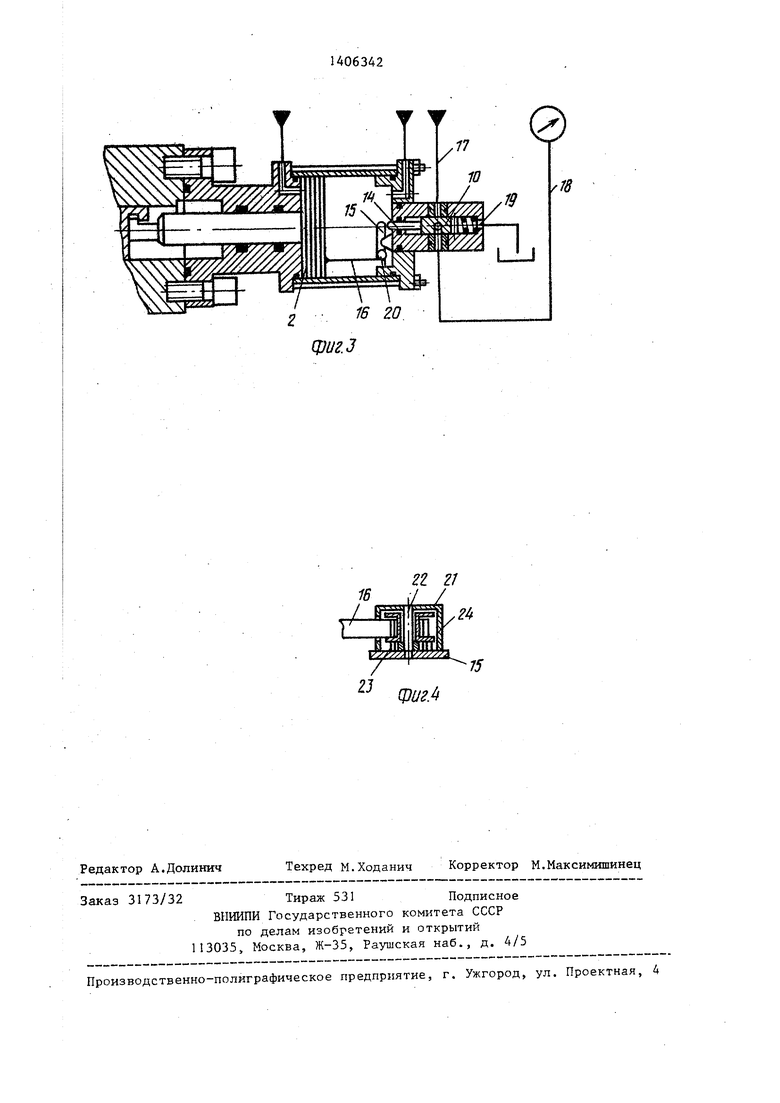
На фигЛ изображен гидроидлиндр привода плашки со встроенным гидрораспределителем (поршень привода в крайнем правом положении, а привод золотника выполнен в виде тяги), общий вид, разрез; на фиг.2 - гидроцилиндр привода плашки со смещенным поршнем (привод золотника выполнен в виде гибкой связи), общий вид, раз|рез; на фиг.З - гидроцилиндр привода плашки (поршень привода в крайнем левом положении, а привод золотника- в виде гибкой связи), общий вид, разрез; на фиг.4 - узел соединения гиб- кой связи золотника с двуплечим рычагом, разрез.
.Превентор включает привод плашки, выполненный в виде гидроцилиндра 1 с поршнем 2, связанным штоком 3с плашкой 4. Гидроцилиндр 1 связан с линией 5 рабочего давления через распределитель 6 управления каналами 7 и 8. В крышку 9 гидроцилиндра 1 встроен гидравлический распредели- тель, выполненный, например, двух- позиционным и состоящий из плоского золотника 10, плоских злементов 11, корпуса 12 распределителя, возвратной пружины 13 и толкателя 14, кото- рый взаимодействует с двуплечим рычагом 15, закрепленным на крьшхке 9 гидроцилиндра (или на корпусе гидрораспределителя) и связанным с поршнем 2 механическим приводом 16. Вход рас- пределителя соединен с каналом 17 давления, а его выходы - с линией 18 контроля и линией 19 слива.
Механический привод 16 может быть вьшолнен в виде тяги (фиг.1) или гибкой связи (фиг.2 и 3), например, из тонкой стальной ленты (фиг.З) или из металлического тросика (фиг.2).
В случае применения гибкой связи узел 20 ее крепления с двуплечим ры- чагом 15 выполнен в виде катушки 21, установленной с возможностью вращения на оси 22, закрепленной на конце одного из плеч рычага 15. Катушка 21
соединена с двуплечим рычагом 15 с помощью плоской спиральной пружины 23 и закрыта кожухом 24. Гибкая связ 16 крепится к катушке 21 с возможностью изменения ее рабочей длины. Двуплечий рычаг 15 закрепляется на крышке 9 гидроцилиндра (или на корпусе гидрораспределителя) с возможностью изменения длин его плеч, а ось двуплечего рычага - с возможностью изменения расстояния до оси толкателя 14 золотника 10.
Устройство работает следующим образом.
В открытом положении превентора плашка 4 и ее привод - шток 3 и поршень 2 гидроцилиндра 1 находятся в крайнем правом положении (фиг.1). Поршень 2 через двуплечий рычаг 15 и- толкатель 14, преодолевая усилие возвратной пружины 13, переключает плоский золотник 10 гидрораспределителя контроля положений, отсекает .ка нал 17 давления от линии 18 контроля соединяя ее через каналы золотника ; со сливом 19. На выходе линии 18 контроля сигнал отсутствует.
При смещении поршня 2 влево (фиг.2), например, под действием сил вибрации или же при подаче рабочего давления на закрытие превентора в канал 7 двуплечий рычаг 15 освобож- Дается, возвратная пружина 13 пере- ;мещает плоский золотник 10 влево, соединяя канал 17 давления с линией 18 контроля, на выходе которой появляется сигнал о смещении поршня из крайнего положения.
В конце хода поршня 2 влево при |3акрытии превентора (фиг.З) механический привод 16 золотника 10, выполненный в виде тяги (фиг.1) или гибкой связи (фиг.2 и 3), длины которых меньше величины рабочего хода поршня 2 на величину хода золотника 10 гидрораспределителя контроля положений, поворачивает двуплечий рычаг 15 вокруг его оси и свободным плечом рычага воздействует на толкатель 14 золотника 10, переключая последний и отсекая тем самым канал 17 давления от линии 18 контроля и соединяя ее с линией 19 слива. На выходе линии 18 контроля сигнал отсутствует, так как поршень находится в крайнем положении.
При перемещении поршня 2 влево гибкая связь 16, сматываясь с катушки 21, вращает ее и закручивает плоскую пружину 23,
При .перемещении поршня 2 вправо по мере освобождения гибкой связи 16 плоская пружина 23 раскручивается, вращая катушку 21 и наматывая на нее гибкую связь 16.
Поскольку в превенторе применяются трубные плашки на различные разме ры бурильных труб, то величина рабочего хода поршня 2 изменяется. Для обеспечения постоянной разницы между величиной рабочего хода поршня 2 и рабочей длиной механического привода 16 золотника 10 гидрораспределителя, которая должна быть равна величине рабочего хода золотника 10, крепление гибкой связи 16 к катушке 21 выполнено с возможностью изменения ее длины. С этой же целью двуплечий рычаг 15 выполнен с возможностью изменения соотношения длин его плеч, а крепление оси двуплечего рьтага 15 - с возможностью изменения расстояния до оси толкателя 14 золотника 10.
Формула изобретения
1. Превентор, включающий корпус, плашки, каждая из которых имеет привод, выполненный в виде гидроцилиндра с поршнем, связанного с линией рабочего давления и имеющего крьшку.
соединенную с механизмом контроля конечных положений плашки в виде гидрораспределителя, в котором размещен золотник с толкателем, отличающийся тем, что, с целью повьш1е- ния надежности контроля конечных положений плашки при одновременном упрощении конструкции, механизм контроля конечных положений плашки дополнительно снабжен тягой с двуплечим рычагом, ось которого размещена на крьш1ке гидроцилиндра, при этом одно плечо рычага связано с тягой, а другое - через толкатель с золотником, причем тяга связана с поршнем, а золотник вьтолнен подпружиненным.
2.Превентор по п.1, о т л и - чающийся тем, что тяга выполнена в виде гибкой связи с узлом крепления к двуплечему рычагу.
3.Превентор по п,2, о тл и - чающийся тем, что узел крепления гибкой связи выполнен в виде установленной с возможностью вращения катушки, связанной с двуплечим рычагьм- плоской спиральной пружиной, а гибкая связь соединена с катушкой с возможностью изменения ее рабочей длины.
4.Превентор по П.1, отличающийся тем, что двуплечий рычаг выполнен с возможностью изменения соотношения длин его плеч.
| название | год | авторы | номер документа |
|---|---|---|---|
| УКАЗАТЕЛЬ ПОВОРОТОВ ШТУРВАЛА МЕХАНИЧЕСКОГО ПРИВОДА ПРЕВЕНТОРА | 1992 |
|
RU2018627C1 |
| Превентор | 1985 |
|
SU1278443A1 |
| Превентор | 1990 |
|
SU1819320A3 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПРИСТВОЛЬНЫХ ПОЛОС В САДУ | 2006 |
|
RU2326516C2 |
| Машина для внесения минеральных удобрений в почву | 1985 |
|
SU1308232A2 |
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |
| Устройство связи транспортного средства с почвообрабатывающим орудием | 1990 |
|
SU1752213A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ПОЖАРА НА МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ ТРАНСПОРТА НЕФТИ И ГАЗА | 2007 |
|
RU2351379C1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
Изобретение относится к горной промьшшенности и позволяет повысить надежность контроля конечных положений плашки при одновременном упрощении конструкции превентОра. Он включает корпус, плашки с приводами в виде гидроцилиндра 1 с поршнем 2, связанного с линией рабочего давления 5 и имею1цего крышку 9. Она соединена с механизмом контроля конечных положений плашки в виде гидрораспределителя, в котором размещен подпружиненный золотник 10 с толкателем 14 и тягой с двуплечим рычагом (ДР) 15. Его ось размещена на крышке 9. Одно плечо ДР 15 связано с тягой, а другое - через толкатель 14 с золотником 10. Тяга связана с поршнем 2 и выполнена в виде гибкой связи (ГС) 16 с узлом крепления к ДР 15. Этот узел выполнен в виде вращающейся катушки, связанной с ДР 15 плоской спиральной пружиной. Причем ГС 16 соединена с катушкой с возможностью изменения ее рабочей длины, а ДР 15 может изменять соотношения длин его плеч. При смещении поршня 2 влево появляется сигнал о смещении поршня 2. В конце его хода влево ГС 16 поворачивает ДР 15 и переключает свободным плечом ДР 15 золотник 10. Сигнал отсутствует, а ГС 16 вращает катушку и закручивает пружину. При перемещении поршня 2 вправо пружина раскручивается, вращая катушку и наматывая на нее ГС 16. 3 з.п. ф-лы, 4 ил. сл
Фиг.з
ZZ 21
.г
ЦзиеА
| Превентор | 1985 |
|
SU1278443A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
