но открыт и рабочий орган 22 выглуС)- ляется, отслеживая движение рукояти 1. При перемещении рукояти 1 влево шток 2 ГЦП 3 увеличивает давление в гидролинии 17, Рабочая жидкость от насоса 10 поступает в поршневую по1
Изобретение относится к мапшно- строению и может быть использовано в системах управления землеройных машин,
Целью изобретения является упрощение конструкции и повьшение надежности следящей системы управления рабочим органом землеройной машины„
На чертеже изображена принципиальная схема следящей системы управления рабочим органом землеройной машины.
Следящая система управления содержит механизм управления, который состоит из рукояти 1 у правления, ша::р- нирно соединенной со штоком 2 гидроцилиндра-приемника 3, корпус которого связан посредством двуплечего рычага 4 с золотником 5 гидрораспре- делителя 6. Шарнир 7 рычага 4 жестко связан с корпусом 8 гидрораспределителя 6, имеющим две центрирующие пружины 9, Гидрораспределитель 6 соединен с насосом 10 напорной гидролинией 11 и с гидробаком 12 сливной гидролинией 13, а также с исполнительным гидроцилиндром 14. Гидроцилиндр 14 соединен шарнирно с плунжером 15 гидроцилиндра-датчика 16 входящего в механизм управления и связанного гид- р олинией 17 с гидроцилиндром-приемником 3, Гидролиния 17 подключена к последовательно соединенным запорному гидроэлементу 18 и редукционному клапану 19, образующим гидроустройство подпитки механизма управления, запи- ранное от насоса 10. В корпусе гидроцилиндра-приемника 3 установлена пружина 20, поджимающая его поршень 21 и образующая с ним гидроустройство подпора механизма управления. Гидроцилиндр 14 связан с рабочим органом 22. Исполнительный запорный гид- розлемент снабжен элементом управления, выполнен1 ым в виде толкателя 23.
лость ИГЦ 14, который, заглубляя рабочий орган 22, поворачивается против часовой стрелки. При непрерывном движении рукояти 1 влево ИГЦ 14 отслеживает ее движение, заглубляя рабочий орган 22. 1 з.п. ф-лы, 1 ил.
5
0
5
0
5
0
5
Следящая система управления работает следующим образом.
При необходимости выглубления рабочего органа 22 оператор перемещает рукоять 1 управления вправо. Так как гидролиния 17 находится под давлением, движение штока 2с поршнем 21 гидроцилиндра-приемника 3 под действием пружины 20 приводит к перемещению его корпуса, повороту двуплечего рычага 4 по часовой стрелке и включению гидрораспределителя 6.
Рабочая жидкость от насоса 10 через гидрораспределитель 6 поступает в штоковую полость исполнительного гидроцилиндра 14. Последний, выглуб- ляя рабочий орган 22, поворачивается по часовой стрелке и перемещает плунжер 15 гидроцилиндра-датчика 16.Давление в гидроцилиндре-датчике 16 возрастает, что приводит к увеличению давления в гидроцилиндре-приемнике 3. Так как его шток 2, связанный с рукоятью 1 управления, фиксируется оператором, корпус гидроцилиндра- приемника 3 под действием увеличенного давления и пружин 9 перемещается влево, поворачивая двуплечий рычаг 4 против часовой стрелки и приводя гидрораспределитель 6 в нейтральное положение,. При непрерывном движении рукояти 1 управления гид ро- распределитель будет постоянно приоткрыт и рабочий орган 22 будет вы- глубляться, отслеживая движение рукояти 1 управления.
Если оператору необходимо остановить движение рабочего органа 22, то он отпускает рукоять 1 управления. Под действием пружин 9 золотник 5 гидрораспределителя 6 ставится в нейтральное положение, перемещая при этом гидроцилиндр-приемник 3 и рукоять 1 управления на некоторое расстояние.
При перемещении рукояти 1 управления влево связанный с ней шток 2 гидроцилиндра-приемника 3 увеличит давление в гидролинии 17. Так как жидкость в гидроцилиндре-приемнике 3 заперта и находится под давлением, его корпус также переместится влево, поворачивая двуплечий рычаг 4 против часовой стрелки и перемещая золотник 5 гидрораспределителя 6 вправо. Рабочая жидкость от насоса 10 поступит в поршневую полость исполнительного гидроцилиндра 14, который, заглубляя рабочий орган 22, поворачивается против часовой стрелки. Плунжер 15 гид- роцилиндра-датчика 1.6 выдвигается из корпуса, увеличивая, объем рабочей полости гидроцилиндра-датчика 16. Это приводит к снижению давления в гидролинии 17, перемещению корпуса гидроцилиндра-приемника 3 под действием пружины 9 вправо и установке золотника 5 гидрораспределителя 6 в нейтральное положение. При непрерывном движении рукояти 1 управления влево исполнительный гидроцилиндр 14 отслеживает ее движение, заглубляя рабочий орган 22.
Компенсация утечек в гидролинии 17 происходит в нерабочем поднятом положении рабочего органа 22, введенном в корпус плунжера 15 гидроцилиндра-датчика 16, и крайне правом положении рукояти 1 управления (показано штриховой линией). В этом по- ложении рукоять 1 управления нажимае на толкатель 23 запорного гидроэлемента 18, плунжер которого перемещается вправо и соединяет редукционный клапан 19с гидролинией 17. Редукционный клапан 19 поддерживает на выходе постоянное давление, независимо от давления на входе, т.е. от давления, создаваемого насосом 10. Под редукционным давлением будет находится и весь контур обратной связи,вклю чающий гидролинию 17, гидроцилиндр- датчик 16 и гидроцилиндр-приемник 3.
После отклонения рукояти 1 управления от крайне правого положения
0
0
5
5
5
0
0
5
0
плунжер запорного гидроэлемента 18 под действием пружины переместится влево, отключая редукционный клапан 19 от гидролинии 17. Таким образом, утечки рабочей жидкости будут компенсироваться при каждом подъеме рабочего органа 22. При этом также будет достигаться синхронизация положения рукояти 1 управления и рабочего органа 22.
Формула изобретения
1.Следящая система управления рабочим органом землеройной машины, содержащая насос, напорную и сливную гидролинии, гидрораспределитель с размещенным в его корпусе золотником, исполнительньй гидроцилиндр с рабочими полостями, сообщенными че-. рез гидрораспределитель с напорной
и сливной гидролиниями, и механизм управления, включающий рукоять управления, гидроустройства подпора и подпитки, гидроцилиндр-приемник, кинематически связанный с исполнительным гидроцилиндром, гидроцилиндр- датчик, рабочей полостью сообщенный с выходами гидроустройств подпора и подпитки и с рабочей полостью гидроцилиндра-приемника, по зшень и шток которого кинематически связаны с рукоятью управления, а корпус - с золотником гидрораспределителя, отличающаяся тем, что, с целью повышения надежности ее работы, шток гидроцилиндра-приемника связан с рукоятью управления шарнирно, гидроустройство подпора выполнено в виде подпружиненного поршня а кинематическая связь корпуса гидроцилиндра-приемника с золотником гидрораспределителя выполнена в виде двуплечего рычага с шарниром, кинематически связанным с корпусом гидрораспределителя.
2.Система по п. 1, отлича- к) щ а я с я тем, что гидрораспре- делитель снабжен центрирующими пружинами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромеханический привод погрузчика | 1986 |
|
SU1467144A1 |
| Гидропривод землеройной машины | 2022 |
|
RU2795877C1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| Система управления догружающего устройства скрепера | 2021 |
|
RU2761274C1 |
| Грейферное рабочее оборудование землеройной машины | 2023 |
|
RU2834377C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО УПРАВЛЕНИЯ СЕРВОМОТОРОМ КЛАПАНА ТУРБОМАШИНЫ | 1994 |
|
RU2086778C1 |
| Рабочее оборудование для перемещения вязких материалов | 1987 |
|
SU1476074A1 |
| Автогрейдер | 1986 |
|
SU1490315A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1382914A2 |
Изобретение относится к области машиностроения и позволяет упростить конструкцию и повысить надежность следящей системы управления рабочим органом землеройной машины. Система включает гидрораспределитель (ГР) 6 с центрирующими пружинами 9, соединенный с насосом 10, напорную 11 и сливную 13 гидролинии, сообщенные через ГР 6 с исполнительным гидроцилиндром (ИГЦ) 14. В корпусе ГР6 размещен золотник 5. Механизм управления включает рукоять управления 1, гидроцилиндр-приемник (ГЦП) 3 и гидроустройства подпора и подпитки. При этом ГЦП 3 кинематически связан с ИГЦ 14, шарнирно соединенным с плунжером 15 гидроцилиндра-датчика 16, сообщенного рабочей полостью с выходами гидроустройств подпора и под- пи.тки и гидролинией 17 с рабочей полостью ГЦП 3. Гидролиния 17 подключена к последовательно соединенным запорному гидроэлементу 18. и редукционному клапану 19, образующим гидроустройство подпитки. В корпусе ГЦП 3 установлена пружина 20, поджимающая его поршень 21 и образующая с ним гидроустройство подпора. Кинематическая связь ГЦП 3 с золотником 5 выполнена в виде двуплечего рычага 4 с шарниром 7, кинематически связанным с корпусом 8 ГР 6. При непрерывном движении рукояти 1 ГР 6 постоянQ S (Л &0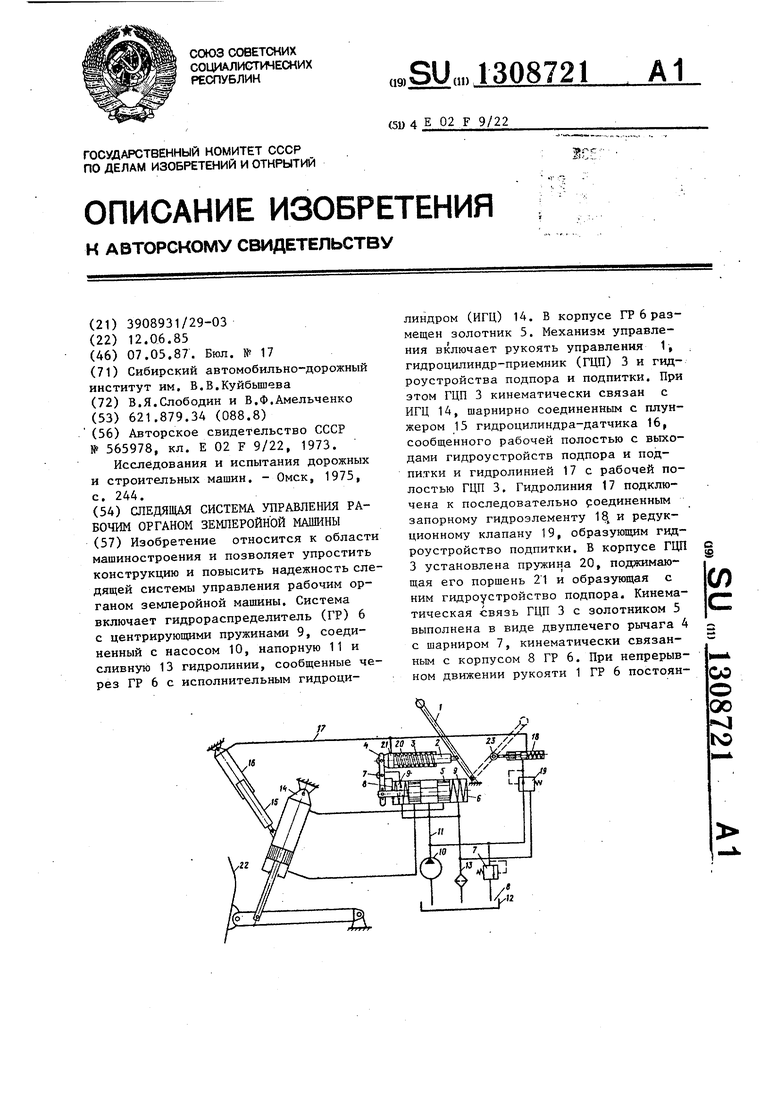
| Система управления рабочим органом землеройно-транспортных машин | 1973 |
|
SU565978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исследования и испытания дорожных и строительных машин | |||
| - Омск, 1975, с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
