(61) 1022274
(21)4173013/24-07
(22)04.01.87
(46) 30.06.88. Бю.ч.,№ 24
(71)Азербайджанский институт нефти и .химии им. М. Азизбекова
(72)В. А. Алиев, А. А. Барьюдин и А. Г. Гусейнов
(53)62-83:621.314.5(088.8)
(56) Авторское свидетельство СССР Ло 1022274, кл. Н 02 Р 5/06, 1981.
(54)УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ ЭЛЕКТРОПРИВОДА С РЕВЕРСОМ ПОЛЯ
(57) Изобретение относится к электро- те.хиике и может быть использовано для автоматического управления электродвигателями подъемных ме.ханизмов. Целью изобретения является повьиление точности определения режима работы электропривода. Устройство содержит два элемента И 13, 14, в.ходы которых соединены с выходами знакочувствительных элементов 2, 4, 6. Данное устройство позволяет раздельно идентифицировать режимы работы электропривода с реверсом поля электродвигателя в любом квадранте ме.ханической характеристики, а также переходы из тормозного режима в двигательный. 1 ил.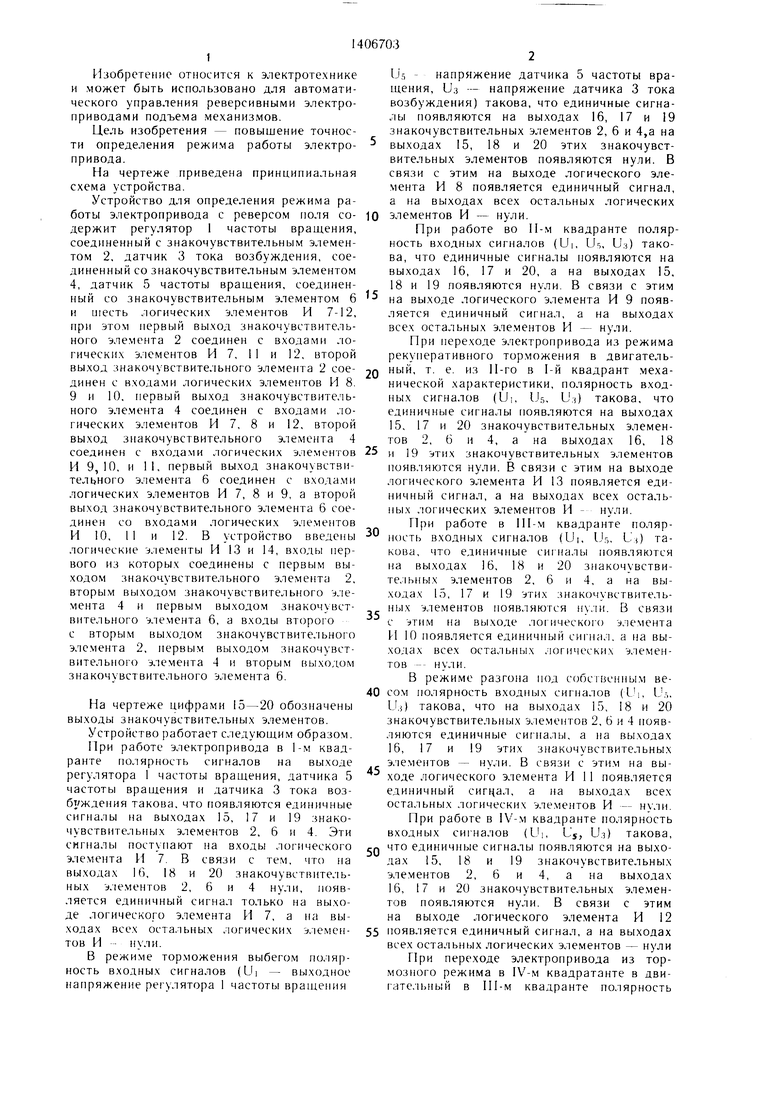
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения режима работы электропривода с реверсом поля | 1981 |
|
SU1022274A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1984 |
|
SU1328913A1 |
| Устройство для определения режима работы электропривода постоянного тока | 1984 |
|
SU1354376A1 |
| Устройство для определения режима работы электрической машины постоянного тока | 1986 |
|
SU1399877A1 |
| Электропривод постоянного тока буровой лебедки | 1988 |
|
SU1577055A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Градиентометр | 1985 |
|
SU1413565A1 |

5 -BJIE
(Л
с
E
Э
05
о со
rvj
Изобретение относится к электротехнике и может быть использовано для автоматического управления реверсивными электроприводами подъема механизмов.
Цель изобретения - повышение точности определения режима работы электро- привода.
На чертеже приведена принципиальная схема устройства.
Устройство для определения режима работы электропривода с реверсом поля со- держит регулятор 1 частоты вращения, соединенный с знакочувствительным элементом 2, датчик 3 тока возбуждения, соединенный со знакочувствительным элементом 4, датчик 5 частоты вращения, соединенный со знакочувствительным элементом 6 и uiecTb логических элементов И 7-12, при этом первый выход знакочувствитель- ного элемента 2 соединен с входами логических элементов И 7, 11 и 12, второй выход знакочувствительного элемента 2 соединен с входами логических элементов И 8, 9 и 10, первый выход знакочувствительного элемента 4 соединен с входами логических элементов И 7, 8 и 12, второй выход знакочувствительного элемента 4 соединен с входами логических элементов И 9,10, и 11, первый выход знакочувствительного элемента 6 соединен с входа.ми логических элементов И 7, 8 и 9, а второй выход знакочувствительного элемента 6 соединен со входа.ми логических элементов И 10, И и 12. В устройство введены логические элементы И 13 и 14, входы первого из которых соединены с первым выходом знакочувствительного эле.мепта 2, вторым выходом знакочувствительного э;1е- мента 4 и первым выходом знакочувствительного элемента 6, а входы второго с вторым выходом знакочувствите;1ьного эле.мента 2, нервым выходом знакочувст- вительно1Ч) элемента 4 и вторым вы.ходом знакочувствительного элемента 6.
На чертеже цифрами 15-20 обозначены выходы знакочувствительных элементов.
Устройство работает следующим образом.
При работе электропривода в 1-м квадранте полярность сигналов на выходе регулятора 1 частоты вращения, датчика 5 частоты вращения и датчика 3 тока воз- бт/жде}1ия такова, что появляются единичные сигналы на выходах 15, 17 и 19 знакочувствительных элементов 2, 6 и 4. Эти сигналы поступают на входы логического элеме)1та И 7. В связи с тем. что на выходах 16, 18 и 20 знакочувствительных э. 1ементов 2, 6 и 4 нули, появляется единичный сигнал только на выходе логического элемента И 7, а на выходах всех остальных логических элемен- тов И нули.
В режиме тор.можения выбегом полярность входных сигналов (U| - выходное напряжение регулятора 1 частоты вращения
0
5
0
5
5
5
0
Us напряжение датчика 5 частоты вра- 1цения, U.J - напряжение датчика 3 тока возбуждения) такова, что единичные сигналы появляются на выходах 16, 17 и 19 знакочувствительных элементов 2, 6 и 4,а на выходах 15, 18 и 20 этих знакочувствительных элементов появляются нули. В связи с этим на выходе логического элемента И 8 появляется единичный сигнал, а на выходах всех остальных логических элементов И - нули.
При работе во П-м квадранте полярность входных сигналов (LJi, Us, из) такова, что единичные сигналы появляются на выходах 16, 17 и 20, а на выходах 15, 18 и 19 появляются нули. В связи с этим на выходе логического элемента И 9 появляется единичный сигнал, а на выходах всех остальных элементов И - нули.
При переходе электропривода из режима рекуперативного торможения в двигательный, т. е. из 11-го в 1-й квадрант механической характеристики, полярность входных сигналов (Ui, Us, U,i) такова, что единичные сигналы появляются на выходах
15,17 и 20 знакочувствительных элементов 2, 6 и 4, а на выходах 16, 18 и 19 этих знакочувствительных элементов появляются нули. В связи с этим на выходе логического элемента И 13 появляется единичный сигнал, а на выходах всех остальных логических элементов И - нули.
При работе в 111-м квадранте полярность входных сигналов (Ui, Ь г), L t) такова, что единичные сигч(алы появляются на выходах 16, 18 и 20 знакочувстви- те.1ьных элементов 2, 6 и 4, а на выходах 15, 17 и 19 этих знакочувствительных элементов появляются нули. В связи с этим на выходе логического элемента Н 10 появляется единичный сигнал, а на выходах всех остальных логических элементов -- нули.
В режиме разгона под собственным весом полярность входных сигналов (L l, Us. U,j) такова, что на выходах 15, 18 и 20 знакочувствительных элементов 2, 6 и 4 появляются единичные сигналы, а на выходах
16,17 и 19 этих знакочувствительных э.че.ментов - нули. В связи с эти.м на выходе логического элемента И 11 появляется единичный сигцал, а на выходах всех остальных логических эле.ментов И - нули.
При работе в IV -м квадранте полярность входных сигналов (Ui, U s, U.i) такова, что единичные сигналы появляются на выходах 15, 18 и 19 знакочувствительных эле.ментов 2, 6 и 4, а на выходах 16, 17 и 20 знакочувствительных элементов появляются нули. В связи с этим на выходе логического элемента И 12 появляется единичный сигнал, а на выходах всех остальных логических элементов - нули
При переходе электропривода из тормозного режима в IV-м квадратанте в двигательный в 111-м квадранте полярность
входных сигналов (Ui, Us, U.) такова, что единичные сигна.1ы появляются на выходах 16, 18 и 19 знакочувствительных элементов 2, 6 и 4, а на выходах 15, 17 и 20 знакочувствительных элементов появляются нули.
В связи с этим на выходе логического элемента И 14 появляется единичный сигнал, а на выходах всех остальных логических элементов - нули.
Таким образом, устройство позволяет раздельно идентифицировать режимы работы электропривода с реверсом поля электродвигателя в любом квадранте механической характеристики, и переходы его из двигательного в тормозной режим, а также переходы из тор.мозного режима в двигательный, т. е. повысить точность определения режимов работы электропривода.
Формула изобретения
Устройство для определения режима работы электропривода с реверсом поля по авт. св. № 1022274, отличающееся тем, что, с целью повышения точности определения режима работы элекропривода, в него введены два логических эле.мента И, входы первого из которых соединены с первым выходом первого знакочувствительного элемента, вторым выходом второго знакочувствительного элемента и первым выходом третьего знакочувствительного элемента, а входы второго - со вторым выходом первого знакочувствительного элемента, пер- вым выходом второго знакочувствительного элемента и вторым выходом третьего знакочувствительного эле.мента, а их выходы являются выходами устройства.
