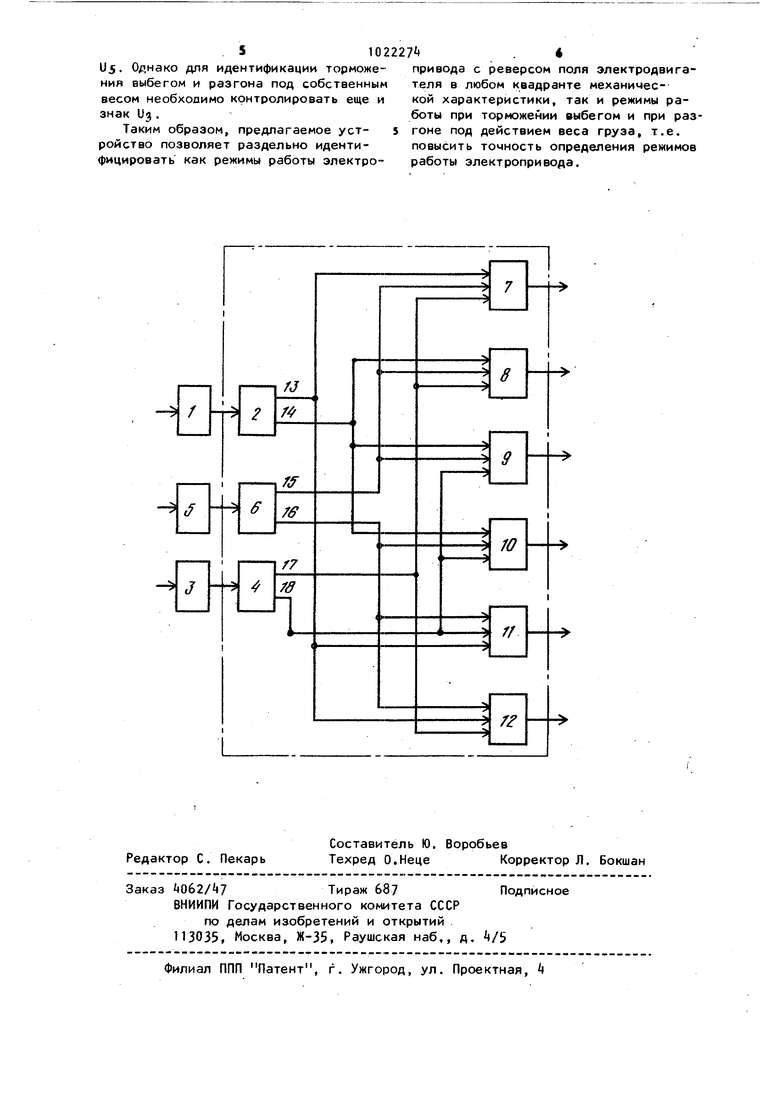
. Изобретение относится к электрот нике и может &iiTb использовано для автоматического управления реверсив ными электроприводами подъемных мех низмов. Известно устройство для определения режима работы электропривода, которое на основании анализа комби нации знаков тока якоря 1 и напряжения на якоре Ua позволяет определить нахождение электропривода только во It-M и 1У-М квадрантах механической характеристики l. Это устройство невозможно использовать для определения режима работы электропривода с реверсом поля, так как в нем ток якрря имеет одно и то же направление в любом из квадрантов механической характеристики. Наиболее близким по технической сущности к изобретению является устройство для определения режима работы электропривода с реверсом поля, содержаи ее регулятор частоты вращения, соединенный с первым знако чувствительным элементом, датчик то ка возбуждения, соединенный с вторым знакочувствительным элементом, датчик частоты вращения р. Недостатком устройства является то, что оно не позволяет раздельно определить: нахождение электропривода в каком-либо.из квадрантов механичес кой характеристики, а позволяет только определить правую .{1 и 1У л квадранты) и левую (И и Ш квадран- ты) половины механической характер йс тики. Цель изобретения - повышение точности определения режима работы электропривода. Поставленная цель достигается тем, что в устройство для определени режима работы электропривода с реверсом поля, содержащее регулятор частоты вращения, соединенный с первым знакочувствительным элементом, датчик тока возбуждения, соединенный с вторым знакочувствительным элементом, датчик частоты вращения, дополнительно введены третий знакочувствительный элемент и шесть логических элементов И, при этом вход третьего знакочувствительного элемента соединен с выходом датчика частоты вращения, первый выход первого знакочувствительного элемента соединен с входами первого, пятогЬ 7k и шестого логических элементов И, второй выход первого знакочувствительного элемента соединен с входами второго, третьего и четвертого логических элементов И, первый выход третьего знакочувствительного элемента соединен с входами первого, второго и третьего логических элементов И, второй выход третьего знакочувствительного элемента соединен с входами четвертого, пятого и шестого логических элементов И, первый выход второго знакочувствительного элемента соединен с входами первого, второго И шестого логических элементов И, а второй выход второго знакочувствительного элемента соединен с входами третьего, четвертого и пятого логических элементов И. На чертеже приведена принципиальная схема устройства. Устройство для определения режима работы электропривода с реверсом поля содержит регулятор 1 частоты вращения, соединенный с знакочувствительным элементом 2, датчик 3 тока возбуждения, соединенный со знакочувствительным элементом t, 5 частоты вращения, знакочувствительнь1Й элемент 6, шесть логических элементов И 7-12, при этом вход знакочувствительного элемента 6 соединен с выходом датчика 5 частоты вращения, выход 13 знакочувствительного элемента 2 соединен с входами логических элементов И J, П и 12, выход 14 знакочувствительного элемента 2 соединен с входами логических элементов И В, 9 и 10, выход 15 знакочувствительного элемента 6 соединен с входами логических элементов И 7-9, выход 1б знакочувствительного элемента 6 соединен с входами логических элементов И 10-12, выход 17 знакочувствительного элемента соединен с входами логических элемен- тов И 7,8 и t2, а выход 18 знакочувствительного элемента i соединен с входами логических элементов И Э-И. Устройство работает следующим образом. При работе электропривода в 1-м квадранте полярность сигналов на выходе регулятора 1 частоты вращения, датчика 5 частоты вращения и датчика 3 тока возбуждения такова, что появляются единичнь1е сигналы на выходах 13,.15 и 17 знакочувствительных элементов 2,6 и Ц. Эти сигналы поступают на входы логического элемента И 7. В связи с тем, что на выходах 14, 16 и 18 знакочувствительных элементов 2,б, нули, появляется единичный сигнал только на выходе логического элемента И 7, а на выходах всех остальных логических элементов И7 нули. В режиме торможения выбегом полярность входных сигналов ( выходное напряжение регулятора 1 частоты вращения; U напряжение датчика 5 частоты вращения; нагфяж ние дат1«1ка 3 тока возбуждения) такова, -что единичные сигиа1Ш появляются на выходах 1(,15 и 17 знакочувствительных элементов 2,6 и k, а на выходах 13,16 и 18 этих знакочувствительных элементов появляются нули. В связи с этим на выходе логи ческого элемента И 8 появляется еди ничный сигнал, а на выходах всех остальных логических элементов Инули. При работе во ft-м квадранте полярность входных сигналов (U , Uj-, U) такова, что единичные сигналы появляются на выходах Hj 15 и 18 знакочувствительных элементов 2,6 и t, а на выходах 13 16 и 17 этих знакоцувствительных элементов по. являются нули. В связи с этим на выходе логического элемента И 9 появляется единичный сигнал а на выходах всех остальных элементов Инули.
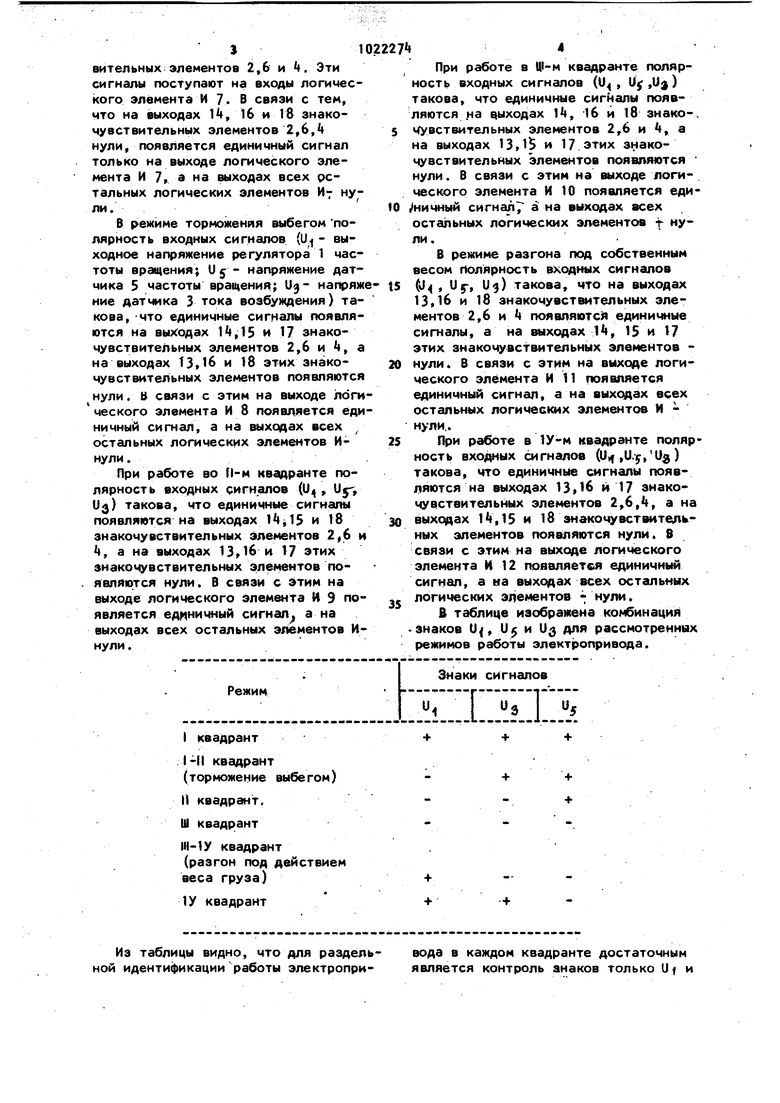
Режим
I квадрант
I-И квадоант (торможение выбегом)
И квадрант. Ш квадрант
Н1-1У квадрант (разгон под действием веса груза)
1У квадрант
Знаки сигналов
.Ч1...1..Л1.1..
f
4 При работе в Ш-м квадранте полярность входных сигналов (U , U ,1} ) такова, что единичные сигналы появляются .на выходах Il, 16 и 18 знаке-. вствительных элементов 2,6 и 4, а на выходах 13,15 и 17 этих знакочувствительных элементов появляются нули. В связи с этим на выходе логического элемента И 10 появляется единичнь сигнал а на выходах всех остальных логических элементов f нули . В режиме разгона под собственным весом Полярность входных сигналов (J , , и) такова, что на выходах 13,16 и 18 знакочувствительных элементов 2,6 и Ц появляются единичные сигналы, а на выходах 14, 15 и 17 этих знaкoчyвctвитeльныx элементов нули. В связи с этим на выходе логического элемента И 11 появляется единичный сигнал, а на выходах всех остальных логичес1шх элементов И нули,. При в 1У-М квадранте полярность входных сигналов ( «U.tU ) такова, что единичные сигналы появляются на выходах и 17 знакочувствительных элементов 2,6,4, а на выходах 14,15 и 18 знакомест тельных элементов появляются ну/т, в связи с этим на выходе логического элемента И 12 появляется единичный сигнал, а на выходах всех остальных логических элементов нули. В таблице изображена комбинация Знаков и, и и и для рассмотренных режимов работы электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения режима работы электропривода с реверсом поля | 1987 |
|
SU1406703A2 |
| Реверсивный тиристорный электропривод постоянного тока | 1984 |
|
SU1328913A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1984 |
|
SU1206942A2 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Устройство для определения режима работы электропривода постоянного тока | 1984 |
|
SU1354376A1 |
| Электропривод постоянного тока буровой лебедки | 1988 |
|
SU1577055A1 |
| Устройство для определения режима работы электропривода постоянного тока с двухзонным регулированием | 1984 |
|
SU1272443A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1456934A1 |
, с. 10-12.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ ЭЛЕКТРОПРИВОДА С РЕВЕРСОМ ПОЛЯ,содержащее регулятор частоты вращения,соединенный с первым знакочувствительным элементом, датчик тока возбуждения, соединенный с вторым знакочувствительным элементом, датчик частоты врацения, о т л и чающееся тем, что, с целью повышения точности, в него дополнительно введены третий знакочувствительный элемент и шесть логических элементов И, при этом вход третьего знакочувствительного элемента соединен с выходом датчика частоты вращения, первый выход первого знакочувствительного элемента соединен с вхрдами первого, пятого и шестого логических элементов И, второй выход первого знакочувствительного,- элемента соединен с входами второго, третьего и четвертого логических элементов И, первый выход третьего знакочувствительного элемента соединен с входами первого, второго и третьего логических элементов И, второй выход третьего знакочувствительного элемента соединен с входаS ми четвертого, пятого и шестого логических элементов И, первый выход второго знакочувствительного элемента соединен с входами первого, второго и шестого логических элементов И, а второй выход второго знакочувствительного элемента соединен с входами третьего, четвертого и пяIND того логических элементов И. ьэ 1C 4ib
Из таблицы видно, что для раздельной идентификации работы электропривода в каждом квадранте достаточным является контроль знаков только Uf и
Uj. Однако для идентификации торможения выбегом и разгона под собственным весом необходимо контролировать еще и знак Uj.
Таким образом, предлагаемое устройство позволяет раздельно идентифицировать как режимы работы электропривода с реверсом поля электродвигателя в любом квадранте механической характеристики, так и режимы работы при торможении выбегом и при разгоне под действием веса груза, т.е. повысить точность определения режимов работы электропривода.
