ч
СХ)
ел
00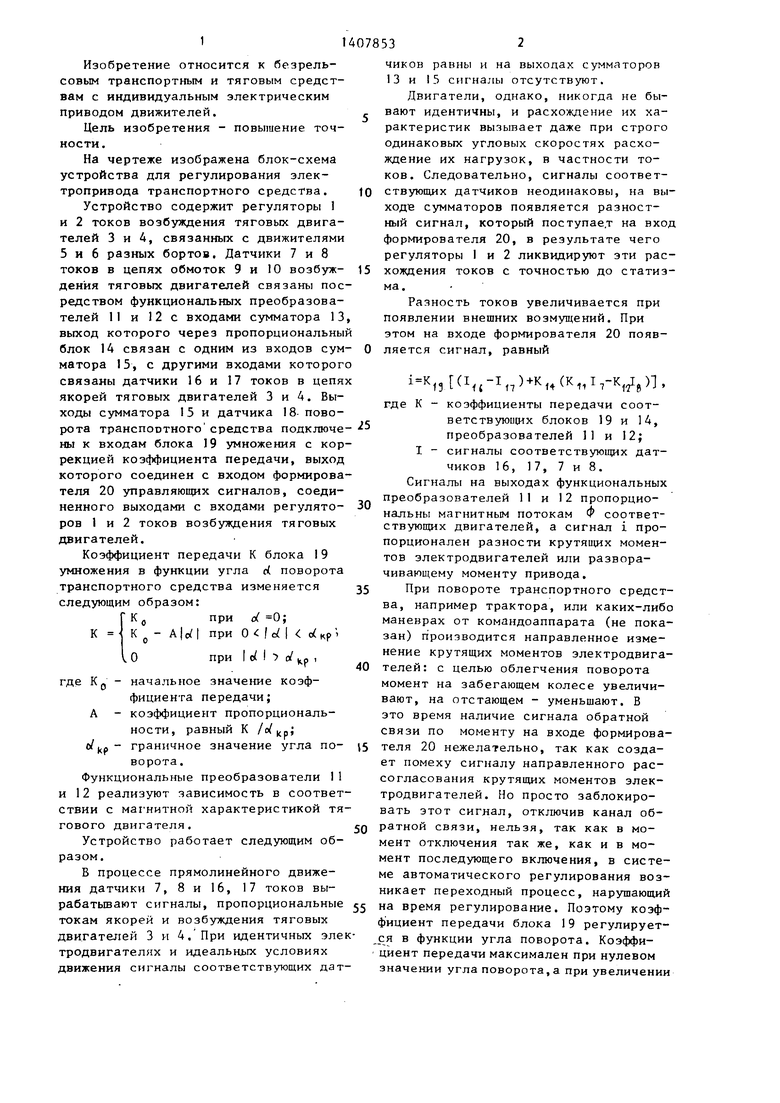
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления электроприводом автономного транспортного средства | 1985 |
|
SU1289711A1 |
| Электромеханическая двухпоточная передача тягового средства | 1988 |
|
SU1676849A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| Транспортное средство сельскохозяйственного назначения | 1981 |
|
SU1001880A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2020 |
|
RU2750943C1 |
Изобретение относится к транспортным тяговым средствам с индивидуальным электрическим приводом движителей, тракторам, машинотракторным агрегатам, машинам строительно-дорожного и специального назначения и автопоездам с традиционным электрическим приводом или приводом типа мотор - колесо. Цель изобретения - повыше1ше точноетги. Устройство для регулирования электропривода транспортного средства содержит регуляторы 1 и 2 токов возбуждения тяговых двигателей, входы которых соединены с выходами формирователя 20 управляющих сигналов, подключенного входом к выходу блока 19 умножения, входы которого соединены с выходами датчика 18 поворота транспортного средства и сумматора 15, один из входов которого связан с выходом сумматора 13, а другие - с датчиками 16 и 17 тока в цепи якорей тяговых двигателей. Входы сумматора 13 соединены через функциональные преобразователи II и 12 с датчиками 7 и 8 токов возбуждения тяговых двигателей. 1 ил. о сл
о
о
о
о
Изобретение относится к безрельсовым транспортным и тяговым средствам с индивидуальным электрическим приводом движителей.
Цель изобретения - повышение точности.
На чертеже изображена блок-схема устройства для регулирования электропривода транспортного средства.
Устройство содержит регуляторы 1 и 2 токов возбуждения тяговых двигателей 3 и 4, связанных с движителями 5 и 6 разных бортов. Датчики 7 и 8 токов в цепях обмоток 9 и 10 возбуждения тяговых двигателей связаны посредством функциональных преобразователей 11 и 12 с входами сумматора 13, выход которого через пропорциональный блок 14 связан с одним из входов сумматора 15, с другими входами которого связаны датчики 16 и 17 токов в цепях якорей тяговых двигателей 3 и 4. Выходы сумматора 15 и датчика 18- поворота транспоитного средства подключе ны к входам блока 19 умножения с коррекцией коэффициента передачи, выход которого соединен с входом формирователя 20 управляющих сигналов, соединенного выходами с входами регуляторов 1 и 2 токов возбуждения тяговых двигателей.
Коэффициент передачи К блока 19 умножения в функции угла d поворота транспортного средства изменяется следующим образом:
-
Ко
К,-
О
при о( 0; при О f с I
при I о( I с/
о(
Кр
кр
А кргде Кр - начальное значение коэффициента передачи; коэффициент пропорциональности, равный К /o(„; граничное значение угла по- ворота.
Функциональные преобразователи 11 и 12 реализуют зависимость в соответствии с маг нитной характеристикой тягового двигателя.
Устройство работает следующим образом.
В процессе прямолинейного движения датчики 7, 8 и 16, 17 токов вырабатьшают сигналы, пропорциональные 55на время регулирование. Поэтому коэфтокам якорей и возбуждения тяговыхф ициент передачи блока 19 регулируетдвигателей 3 и 4. При идентичных элек- я в функции угла поворота. Коэффитродвигателях и идеальных условияхциент передачи максимален при нулевом
движения сигналы соответствующих дат-значении угла поворота,а при увеличении
чиков равны и на выходах сумматоров 13 и 15 сигналы отсутствуют.
Двигатели, однако, никогда не бывают идентичны, и расхождение их характеристик вызывает даже при строго одинаковых угловых скоростях расхождение их нагрузок, в частности токов. Следовательно, сигналы соответствующих датчиков неодинаковы, на выходе сумматоров появляется разностный сигнал, который поступает на вход формирователя 20, в результате чего регуляторы I и 2 ликвидируют эти расхождения токов с точностью до статиз- ма.
Разность токов увеличивается при появлении внешних возмущений. При этом на входе формирователя 20 появ- ляется сигнал, равный
25
30
5
0
i5
0
i 13t Iu-b7),
н(к,,1,)1,
где К - коэффициенты передачи соответствующих блоков 19 и 14, преобразователей 11 и 12; I - сигналы соответствующих датчиков 16, 17, 7 и 8. Сигналы на выходах функциональных преобразователей 11 и 12 пропорциональны магнитным потокам Ф соответствующих двигателей, а сигнал i пропорционален разности крутящих моментов электродвигателей или разворачивающему моменту привода.
При повороте транспортного средства, например трактора, или каких-либо маневрах от командоаппарата (не показан) производится направленное изменение крутящих моментов электродвигателей: с целью облегчения поворота момент на забегающем колесе увеличивают, на отстающем - уменьшают. В это время наличие сигнала обратной связи по моменту на входе формирователя 20 нежелательно, так как создает помеху сигналу направленного рассогласования крутящих моментов электродвигателей. Но просто заблокировать этот сигнал, отключив канал обратной связи, нельзя, так как в момент отключения так же, как и в момент последующего включения, в системе автоматического регулирования возникает переходный процесс, нарушающий
абсолютной величины угла поворота уменьшается и равен нулю при значении угла, большем критического.
При повороте и маневрах влияние канала обратной связи ослабляется пропорционально углу поворота, а при больших углах канал плавно отключается, что обеспечива ет непрерывность регулирования.
Ф
ормула изобретения
Устройство для регулирования электропривода транспортного средства, содержащее регуляторы токов возбужде- ния тяговых двигателей, связанных с движителями разных бортов, формирователь управляющих сигналов, выходы которого связан с входами регуляторов токов возбуждения, сумматоры, выход
7853
одного из которых связан с одним из входов другого сумматора, другие входы которого соединены с выходами датчиков тока в цепях обмоток якорей тяговых двигателей, датчики токов возбуждения тяговых двигателей и дат чик угла поворота транспортного средства, отличающееся тем, что, с целью повышения точности.
оно
снабжено подключенньми входами к выходам датчиков токов возбуждения функциональными преобразователями и блоком умножения, входы которого соедине- нены с выходами другого сумматора и датчика угла поворота, а выход - с входом формирователя управляющего сигнала, причем выходы функциональных преобразователей подключены к входам одного из сумматоров.
| Автоматическая телефонная система | 1915 |
|
SU880A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
